Download presentation
Presentation is loading. Please wait.

2
( Numerical Methods for Ordinary Differential Equations )
")
3
常微分方程分为 ( 1 )初值问题 ( 2 )边值问题 一、初值问题的数值解法 §1 引 言 一阶常微分方程初值问题的一般形式是 :
初值问题 ( 2 )边值问题 一、初值问题的数值解法 §1 引 言 一阶常微分方程初值问题的一般形式是 :")
4
称 在区域 D 上对 满足 Lipschitz 条件 是指 :

5
二、初值问题解的存在性 考虑一阶常微分方程的初值问题 /* Initial-Value Problem */ : 则上述 IVP 存在唯一解。 只要 在 上连续, 且关于 y 满足 Lipschitz 条件, 即存在与 无关的常数 L 使 对任意定义在 上的 都成立,

6
要计算出解函数 y(x) 在一系列节点 a = x 0 < x 1 <…< x n = b 处的近似值 采用离散化方法。 称节点间距 为步长, 通常采用等距节点,即取 h i = h ( 常数 ) 。
 在一系列节点 a = x 0 < x 1 <…< x n = b 处的近似值 采用离散化方法。 称节点间距 为步长, 通常采用等距节点,即取 h i = h ( 常数 ) 。")
7
三、初值问题的离散化方法 离散化方法的基本特点是依照某一递推公式, 值, 取 。 按节点从左至右的顺序依次求出 的近似 如果计算 ,只用到前一步的值 ,则称这类方 法为单步方法。 如果计算 需用到前 r 步的值,, 则称这类方法为 r 步方法。

8
§2 欧拉方法 /* Euler’s Method */ /* Euler’s Method */ 欧拉公式 ( 单步显示公式): 向前差商近似导数 记为 x0x0 x1x1
: 向前差商近似导数 记为 x0x0 x1x1")
9
亦称为欧拉折线法 /* Euler’s polygonal arc method*/ 在假设 y i = y(x i ) ,即第 i 步计算是精确的前提 下,考虑的截断误差 R i = y(x i+1 ) y i+1 称为局部截断 误差 /* local truncation error */ 。 定义 若某算法的局部截断误差为 O(h p+1 ) ,则称该 算法有 p 阶精度。 定义
 ,即第 i 步计算是精确的前提 下,考虑的截断误差 R i = y(x i+1 ) y i+1 称为局部截断 误差 /* local truncation error */ 。 定义 若某算法的局部截断误差为 O(h p+1 ) ,则称该 算法有 p 阶精度。 定义")
10
欧拉法的局部截断误差: R i 的主项 /* leading term */ 欧拉法具有 1 阶精度。

11
例 1: 用欧拉公式求解初值问题 取步长 。 解 : 应用 Euler 公式于题给初值问题的具体形式为: 其中 。计算结果列于下表:

13
可用来检验近似解的准确程度。 进行计算,数值解已达到了一定的精度。 这个初值问题的准确解为 , 从上表最后一列,我们看到取步长

14
欧拉公式的改进: 隐式欧拉法 /* implicit Euler method */ 向后差商近似导数 x0x0 x1x1 )(,()( 1101 xyxfhyxy
(,()( 1101 xyxfhyxy ")
15
由于未知数 y i+1 同时出现在等式的两边,不能直接 得到,故称为隐式 /* implicit */ 欧拉公式,而前者 称为显式 /* explicit */ 欧拉公式。

16
一般先用显式计算一个初值,再迭代求解。 隐式欧拉法的局部截断误差: 即隐式欧拉公式具有 1 阶精度。

17
梯形公式 /*trapezoid formula */ — 显、隐式两种算法的平均 注:的确有局部截断误差 , 即梯形公式具有 2 阶精度,比欧拉方法有了进步。 但注意到该公式是隐式公式,计算时不得不用到 迭代法,其迭代收敛性与欧拉公式相似。

18
中点欧拉公式 /* midpoint formula */ 中心差商近似导数 x0x0 x2x2 x1x1 假设, 则可以导出 即中点公式具有 2 阶精度。

19
方 法 显式欧拉 隐式欧拉 梯形公式 中点公式 简单精度低 稳定性最好精度低, 计算量大 精度提高计算量大 精度提高, 显式 多一个初值, 可能影响精度 Can’t you give me a formula with all the advantages yet without any of the disadvantages? Do you think it possible? Well, call me greedy… OK, let’s make it possible.

20
改进欧拉法 /* modified Euler’s method */ Step 1 : 先用显式欧拉公式作预测,算出 Step 2 : 再将 代入隐式梯形公式的右边作校正,得到 1 i y

21
注 : 此法亦称为预测 - 校正法 /* predictor-corrector method */ 可以证明该算法具有 2 阶精度,同时可以看到它 是个单步递推格式,比隐式公式的迭代求解过程 简单。后面将看到,它的稳定性高于显式欧拉法。 改进的欧拉法

22
在实际计算时,可将欧拉法与梯形法则相结合, 计算公式为 应用改进欧拉法, 如果序列 收敛, 它的极限便满足方程

23
改进欧拉法的截断误差 因此,改进欧拉法公式具有 2 阶精度

24
例 2: 用改进 Euler 公式求解例 1 中的初值问题, 取步长 。 解:对此初值问题采用改进 Euler 公式, 其具体形式为 计算结果列于下表:

25
改进的 Euler 法 Euler 法

26
通过计算结果得比较可以看出,改进的 Euler 方法 的计算精度比 Euler 方法要高。

27
§3 龙格 - 库塔法 /* Runge-Kutta Method */ /* Runge-Kutta Method */ 建立高精度的单步递推格式。 单步递推法的基本思想是从 ( x i, y i ) 点出发, 欧拉法及其各种变形所能达到的最高精度为 2 阶。 以某一斜率沿直线达到 点。
 点出发, 欧拉法及其各种变形所能达到的最高精度为 2 阶。 以某一斜率沿直线达到 点。")
28
考察改进的欧拉法,可以将其改写为: 斜率 一定取 K 1 K 2 的平均值吗? 步长一定是一个 h 吗?

29
将改进欧拉法推广为: ),( ),( ][ 12 1 22111 phKyphphxfK yxfK KKhyy ii ii ii 首先希望能确定系数 1 、 2 、 p ,使得到的算法格 式有 2 阶精度,即在 的前提假设下,使得 Step 1: 将 K 2 在 ( x i, y i ) 点作 Taylor 展开
![将改进欧拉法推广为: ),( ),( ][ phKyphphxfK yxfK KKhyy ii ii ii 首先希望能确定系数 1 、 2 、 p ,使得到的算法格 式有 2 阶精度,即在 的前提假设下,使得 Step 1: 将 K 2 在 ( x i, y i ) 点作 Taylor 展开](http://images.slidesplayer.com/40/11046545/slides/slide_29.jpg "将改进欧拉法推广为: ),( ),( ][ phKyphphxfK yxfK KKhyy ii ii ii 首先希望能确定系数 1 、 2 、 p ,使得到的算法格 式有 2 阶精度,即在 的前提假设下,使得 Step 1: 将 K 2 在 ( x i, y i ) 点作 Taylor 展开")
30
Step 2: 将 K 2 代入第 1 式,得到 Step 3: 将 y i+1 与 y( x i+1 ) 在 x i 点的泰勒展开作比较
 在 x i 点的泰勒展开作比较")
31
要求 ,则必须有: 这里有 个未知 数, 个方程。 3 2 存在无穷多个解。所有满足上式的格式统称为 2 阶 龙格 - 库塔格式。 注意到, 就是改进的欧拉法。

32
为获得更高的精度,应该如何进一步推广? 其中 i ( i = 1, …, m ) , i ( i = 2, …, m ) 和 ij ( i = 2, …, m; j = 1, …, i 1 ) 均为待定系数,确定这些 系数的步骤与前面相似。
 , i ( i = 2, …, m ) 和 ij ( i = 2, …, m; j = 1, …, i 1 ) 均为待定系数,确定这些 系数的步骤与前面相似。")
33
考虑一阶常微分方程初值问题

34
将区域 [a,b] 进行分划:
![将区域 [a,b] 进行分划:](http://images.slidesplayer.com/40/11046545/slides/slide_34.jpg "将区域 [a,b] 进行分划:")
35
若

36
则

37
n 级显式 Runge-Kutta 方法

38
二阶 Runge-Kutta 方法 取 n=2 记

39
由此得

40
另一方面 为使局部截断误差为, 应取

41
改进的 Euler 方法 取取

42
中点方法 取

43
二阶 Heun 方法 取

44
二级 Runge-Kutta 方法不超过二阶 记记 则

45
因此局部截断误差只能达到

46
三级 Runge-Kutta 方法 取 n=3

47
记

49
又由于

50
因此要使局部截断误差为 ,必须

51
Kutta 方法 取

52
三阶 Heun 方法 取取

53
三级 Runge-Kutta 方法不超过三阶 完全类似于二级 Runge-Kutta 方法的分析 只能达到 三级 Runge-Kutta 方法的局部截断误差 将 和 都展开到 项, 易证

54
四级 R-K 方法 取 n=4

56
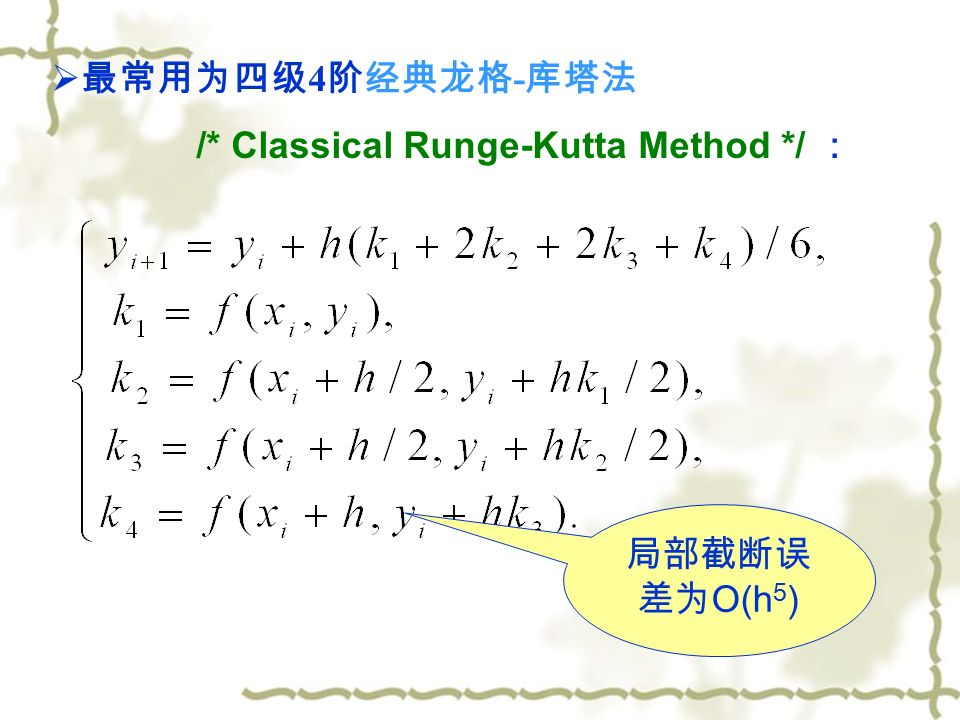
局部截断误 差为 O(h 5 ) 最常用为四级 4 阶经典龙格 - 库塔法 /* Classical Runge-Kutta Method */ :
 最常用为四级 4 阶经典龙格 - 库塔法 /* Classical Runge-Kutta Method */ :")
57
附注: 二阶 Runge-Kutta 方法的局部截断误差 只能达到 五阶 Runge-Kutta 方法的局部截断误差 只能达到 四阶 Runge-Kutta 方法的局部截断误差 只能达到 三阶 Runge-Kutta 方法的局部截断误差 只能达到

58
注: 龙格 - 库塔法的主要运算在于计算 的值,即计 算 的值。 Butcher 于 1965 年给出了计算量与可达 到的最高精度阶数的关系: 753 可达到的最高精度 642 每步须算 K i 的个数 由于龙格 - 库塔法的导出基于泰勒展开,故精 太好的解,最好采用低阶算法而将步长 h 取小。 度主要受解函数的光滑性影响。对于光滑性不

59
§4 单步方法的收敛性与稳定性 /* Convergency and Stability */ /* Convergency and Stability */ 收敛性 /* Convergency */ 定义 若某算法对于任意固定的 x = x i = x 0 + i h ,当 h 0 ( 同时 i ) 时有 y i y( x i ) ,则称该算法是 收敛的。 例:就初值问题 考察欧拉显式格式的 收敛性。
 时有 y i y( x i ) ,则称该算法是 收敛的。 例:就初值问题 考察欧拉显式格式的 收敛性。")
60
解:该问题的精确解为 欧拉公式为 对任意固定的 x = x i = i h ,有

61
稳定性 /* Stability */ 例:考察初值问题 在区间 [0, 0.5] 上 的解. 分别用欧拉显、隐式格式和改进的欧拉格式 计算数值解。 0.0 0.1 0.2 0.3 0.4 0.5 精确解改进欧拉法 欧拉隐式欧拉显式 节点 x i 1.0000 2.0000 4.0000 8.0000 1.6000 10 1 3.2000 10 1 1.0000 2.5000 10 1 6.2500 10 2 1.5625 10 2 3.9063 10 3 9.7656 10 4 1.0000 2.5000 6.2500 1.5626 10 1 3.9063 10 1 9.7656 10 1 1.0000 4.9787 10 2 2.4788 10 3 1.2341 10 4 6.1442 10 6 3.0590 10 7 What is wrong ??! An Engineer complains: "Math theorems are so unstable that a small perturbation on the conditions will cause a crash on the conclusions!"
![ 稳定性 /* Stability */ 例:考察初值问题 在区间 [0, 0.5] 上 的解.](http://images.slidesplayer.com/40/11046545/slides/slide_61.jpg "分别用欧拉显、隐式格式和改进的欧拉格式 计算数值解。 精确解改进欧拉法 欧拉隐式欧拉显式 节点 x i 10 1 10 10 10 10 10 10 10 10 10 10 7 What is wrong . An Engineer complains: Math theorems are so unstable that a small perturbation on the conditions will cause a crash on the conclusions! .")
62
定义 若某算法在计算过程中任一步产生的误差在 以后的计算中都逐步衰减,则称该算法是绝对稳定 的 /*absolutely stable */ 。 一般分析时为简单起见,只考虑试验方程 /* test equation */ 常数,可以 是复数

63
我们称算法 A 比算法 B 稳定,就是指 A 的绝对稳定 区域比 B 的大。 当步长取为 h 时,将某算法应用于上式,并假设只在 初值产生误差 ,则若此误差以后逐步衰减, 就称该算法相对于 绝对稳定, 的全体构成 h hh h 绝对稳定区域。

64
例:考察显式欧拉法 0-1-2 Re Img 由此可见,要保证初始误差 0 以后逐步衰减, 必须满足:

65
例:考察隐式欧拉法 可见绝对稳定区域为: 210Re Img 注:一般来说,隐式欧拉法的绝对稳定性比同阶 的显式法的好。

66
例:隐式龙格 - 库塔法 其中 2 阶方法 的绝对稳定 区域为 0 Re Img 无条件稳定

67
而显式 1~ 4 阶方法的绝对稳定区域为 k=1 k=2 k=3 k=4 -1-2-3 - - - 1 2 3 Re Img

Similar presentations