Download presentation
Presentation is loading. Please wait.

1
第九章 振动 §9.1简谐振动的动力学特征 §9.1 1 简谐振动基本概念 §9.1.2 简谐振动例子(弹簧振子,单摆,扭摆)
")
2
第九章 振动 振动基本概念: 1.振动:一个物理量在某一定值附近往复变化的过程. 机械运动:物体在某一位置附近往复运动的现象. 2. 分类
第九章 振动 振动基本概念: 1.振动:一个物理量在某一定值附近往复变化的过程. 机械运动:物体在某一位置附近往复运动的现象. 2. 分类 按振动规律:简谐、非简谐、随机振动. 按振动原因:自由、受迫、自激、阻尼. 按 自 由 度:单自由度系统、多自由度系统. 按振动位移:角振动、线振动. 按系统参数特征:线性、非线性振动. 简谐振动是最简单、最基本的振动. 复杂的振动可分解为一些简谐振动的叠加.

3
§9.1简谐振动的动力学特征 §9.1 1 简谐振动基本概念 平衡位置——物体在做往复运动时,在某位置所受的
力(或力矩)等于零,则此位置称平衡位置. 回复力(回复力矩)——若作用于物体的力(或力矩)总与物体相对于平衡位置的位移(线位移或角位移)成正比,且力(或力矩)指向(或促使物体返回)平衡位置.则此作用力(或力矩)称线性回复力(回复力矩).即
等于零,则此位置称平衡位置. 回复力(回复力矩)——若作用于物体的力(或力矩)总与物体相对于平衡位置的位移(线位移或角位移)成正比,且力(或力矩)指向(或促使物体返回)平衡位置.则此作用力(或力矩)称线性回复力(回复力矩).即.")
4
简谐振动——物体在线性回复力(或力矩)作用下围绕平衡位置的运动叫简谐振动.
作用下围绕平衡位置的运动叫简谐振动.")
6
§9.1.2 简谐振动例子 = 0 F v v 1. 弹簧振子的振动 x O 弹簧振子——轻弹簧与物体m组成的系统. 物体只受弹力作用
1. 弹簧振子的振动 x O = 0 弹簧振子——轻弹簧与物体m组成的系统. F 物体只受弹力作用 A x v k——劲度系数. 由牛顿第二定律有 -A F v 或 x=0 F=0

7
令 0 由振动系统本身的性质决定. 简谐振动的动力学定义: 若物体运动的动力方程可表示为 (9.1.5) 且其中0 是由系统本身的性质所决定的,则此物体做简谐振动.
 且其中0 是由系统本身的性质所决定的,则此物体做简谐振动.")
8
2. 单摆 如图,铅直面内不计空气阻力,绳不可伸长. O 很小时, ——称回复力. 动画演示(单摆) 动画演示(复摆) 单摆作简谐振动
 动画演示(复摆) 单摆作简谐振动")
9
3. 扭摆 z x y O B 如图,不计空气阻力,小角扭动 回复扭转力矩 由刚体定轴转动定律 刚体作简谐振动 0由系统本身的性质所决定.

11
[例题1] 弹簧下面悬挂物体,不计弹簧质量和阻力,证明在平衡位置附近的振动是简谐振动.
根据牛顿第二定律得 [解] A x l 平衡位置有 与弹簧振子的动力学方程相同,故质点作简谐振动.
![[例题1] 弹簧下面悬挂物体,不计弹簧质量和阻力,证明在平衡位置附近的振动是简谐振动.](http://slidesplayer.com/slide/11227924/60/images/11/%5B%E4%BE%8B%E9%A2%981%5D+%E5%BC%B9%E7%B0%A7%E4%B8%8B%E9%9D%A2%E6%82%AC%E6%8C%82%E7%89%A9%E4%BD%93%EF%BC%8C%E4%B8%8D%E8%AE%A1%E5%BC%B9%E7%B0%A7%E8%B4%A8%E9%87%8F%E5%92%8C%E9%98%BB%E5%8A%9B%EF%BC%8C%E8%AF%81%E6%98%8E%E5%9C%A8%E5%B9%B3%E8%A1%A1%E4%BD%8D%E7%BD%AE%E9%99%84%E8%BF%91%E7%9A%84%E6%8C%AF%E5%8A%A8%E6%98%AF%E7%AE%80%E8%B0%90%E6%8C%AF%E5%8A%A8..jpg "根据牛顿第二定律得. [解] A. x. l. 平衡位置有. 与弹簧振子的动力学方程相同,故质点作简谐振动.")
12
[例题2] 水面上浮有一方形木块,在静止时水面以上高度为a ,水面以下高度为b. 水密度为ρ木块密度为ρ不计水的阻力
求证:木块将作谐振动,并写出谐振动动力学方程. [证] a b ρ ρ S 平衡时 x O ρ ρ S 任意位置 a b x
![[例题2] 水面上浮有一方形木块,在静止时水面以上高度为a ,水面以下高度为b. 水密度为ρ木块密度为ρ不计水的阻力](http://slidesplayer.com/slide/11227924/60/images/12/%5B%E4%BE%8B%E9%A2%982%5D+%E6%B0%B4%E9%9D%A2%E4%B8%8A%E6%B5%AE%E6%9C%89%E4%B8%80%E6%96%B9%E5%BD%A2%E6%9C%A8%E5%9D%97%EF%BC%8C%E5%9C%A8%E9%9D%99%E6%AD%A2%E6%97%B6%E6%B0%B4%E9%9D%A2%E4%BB%A5%E4%B8%8A%E9%AB%98%E5%BA%A6%E4%B8%BAa+%2C%E6%B0%B4%E9%9D%A2%E4%BB%A5%E4%B8%8B%E9%AB%98%E5%BA%A6%E4%B8%BAb.+%E6%B0%B4%E5%AF%86%E5%BA%A6%E4%B8%BA%CF%81%EF%82%A2%E6%9C%A8%E5%9D%97%E5%AF%86%E5%BA%A6%E4%B8%BA%CF%81%E4%B8%8D%E8%AE%A1%E6%B0%B4%E7%9A%84%E9%98%BB%E5%8A%9B.jpg "求证:木块将作谐振动,并写出谐振动动力学方程. [证] a. b. ρ ρ. S. 平衡时. x. O. ρ ρ. S. 任意位置. a. b. x.")
13
平衡时: 任意位置木块受到的合外力为: 即 令 木块作谐振动.

14
§9.2简谐振动的运动学 §9.2.1 简谐振动的运动学方程 §9.2.2 简谐振动的 x-t 图线和相轨迹 §9.2.3 简谐振动矢量表示

15
§9.2简谐振动的运动学 §9.2.1 简谐振动的运动学方程 1. 简谐振动的运动学方程 简谐振动的动力学方程 = 0 x O
动画演示1 其解 或 动画演示2 A与 由初始条件定.

16
2. 特征量物理意义 (1)周期、频率和圆频率 周期(T)—— 系统作一次完整振动所需时间. x( t ) = x( t +T ) Acos(0 t + ) = Acos[0(t + T )+ ] 0T = 2 n T 的最小值 弹簧振子、单摆和扭摆周期分别为
![2. 特征量物理意义 (1)周期、频率和圆频率. 周期(T)—— 系统作一次完整振动所需时间. x( t ) = x( t +T ) Acos(0 t + ) = Acos[0(t + T )+ ]](http://slidesplayer.com/slide/11227924/60/images/16/2.+%E7%89%B9%E5%BE%81%E9%87%8F%E7%89%A9%E7%90%86%E6%84%8F%E4%B9%89+%281%29%E5%91%A8%E6%9C%9F%E3%80%81%E9%A2%91%E7%8E%87%E5%92%8C%E5%9C%86%E9%A2%91%E7%8E%87.+%E5%91%A8%E6%9C%9F%28T%29%E2%80%94%E2%80%94+%E7%B3%BB%E7%BB%9F%E4%BD%9C%E4%B8%80%E6%AC%A1%E5%AE%8C%E6%95%B4%E6%8C%AF%E5%8A%A8%E6%89%80%E9%9C%80%E6%97%B6%E9%97%B4.+x%28+t+%29+%3D+x%28+t+%2BT+%29+Acos%28%EF%81%B70+t+%2B+%EF%81%A1%29+%3D+Acos%5B%EF%81%B70%28t+%2B+T+%29%2B+%EF%81%A1+%5D.jpg "0T = 2 n. T 的最小值. 弹簧振子、单摆和扭摆周期分别为.")
17
频率()—— 单位时间内物体所作完全振动的次数.
角频率()—— 2 秒内完成振动的次数.也称固有频率. 简谐振动的运动学方程 T、 和由振动系统本身的性质决定.
—— 2 秒内完成振动的次数.也称固有频率. 简谐振动的运动学方程. T、 和由振动系统本身的性质决定.")
18
(2) 振幅 振幅A—— 物体离开平衡位置最大位移的绝对值. A由初始条件定. 设 t = 0, x = x0 ,v = v0
 振幅 振幅A—— 物体离开平衡位置最大位移的绝对值. A由初始条件定. 设 t = 0, x = x0 ,v = v0")
19
(3) 相位和初相位 相位 =( t + ),决定振动系统在任意瞬时的运动状态. 初相() ,t = 0 时的相位. 一定的相位对应一定的运动状态. 如图a、b两点运动状态不同,相位亦不同. t x a b c c和a运动状态同,相位差2n . 用相位表征质点振动状态的优点在于它充分反映了振动周期性特征.

20
[例题1] 质点按 作简谐振动.设于某时刻, 相位 问在这些瞬时质点的运动状态如何?
[解]振动状态由x 、v 定
![[例题1] 质点按 作简谐振动.设于某时刻, 相位 问在这些瞬时质点的运动状态如何](http://slidesplayer.com/slide/11227924/60/images/20/%5B%E4%BE%8B%E9%A2%981%5D+%E8%B4%A8%E7%82%B9%E6%8C%89+%E4%BD%9C%E7%AE%80%E8%B0%90%E6%8C%AF%E5%8A%A8.%E8%AE%BE%E4%BA%8E%E6%9F%90%E6%97%B6%E5%88%BB%2C+%E7%9B%B8%E4%BD%8D+%E9%97%AE%E5%9C%A8%E8%BF%99%E4%BA%9B%E7%9E%AC%E6%97%B6%E8%B4%A8%E7%82%B9%E7%9A%84%E8%BF%90%E5%8A%A8%E7%8A%B6%E6%80%81%E5%A6%82%E4%BD%95.jpg "[解]振动状态由x 、v 定.")
21
[例题2] 二同频率不同振幅的简谐振动表示为
试分别就 的情况比较两种振动.
![[例题2] 二同频率不同振幅的简谐振动表示为](http://slidesplayer.com/slide/11227924/60/images/21/%5B%E4%BE%8B%E9%A2%982%5D+%E4%BA%8C%E5%90%8C%E9%A2%91%E7%8E%87%E4%B8%8D%E5%90%8C%E6%8C%AF%E5%B9%85%E7%9A%84%E7%AE%80%E8%B0%90%E6%8C%AF%E5%8A%A8%E8%A1%A8%E7%A4%BA%E4%B8%BA.jpg "试分别就. 的情况比较两种振动.")
22
[解] (1) 二振动相位相同,即振动状态相同,同步调. (2) 二振动相位相反,即二振动反步调.
![[解] (1) 二振动相位相同,即振动状态相同,同步调. (2) 二振动相位相反,即二振动反步调.](http://slidesplayer.com/slide/11227924/60/images/22/%5B%E8%A7%A3%5D+%EF%BC%881%EF%BC%89+%E4%BA%8C%E6%8C%AF%E5%8A%A8%E7%9B%B8%E4%BD%8D%E7%9B%B8%E5%90%8C%EF%BC%8C%E5%8D%B3%E6%8C%AF%E5%8A%A8%E7%8A%B6%E6%80%81%E7%9B%B8%E5%90%8C%EF%BC%8C%E5%90%8C%E6%AD%A5%E8%B0%83.+%282%29+%E4%BA%8C%E6%8C%AF%E5%8A%A8%E7%9B%B8%E4%BD%8D%E7%9B%B8%E5%8F%8D%EF%BC%8C%E5%8D%B3%E4%BA%8C%E6%8C%AF%E5%8A%A8%E5%8F%8D%E6%AD%A5%E8%B0%83..jpg "[解] (1) 二振动相位相同,即振动状态相同,同步调. (2) 二振动相位相反,即二振动反步调.")
23
两简谐振动步调的比较 二振动相位差 ( 2 - 1 ), 若 ( 2 - 1 ) = 2n ,n为整数,称两简谐振动同相位. 若 ( 2 - 1 ) = (2n+1), n为整数,称两简谐振动反相位.
 = (2n+1), n为整数,称两简谐振动反相位.")
24
[例题3] 某简谐振动规律为 初始条件为 ,求该振动的初相位.
[解] 由初始条件得
![[例题3] 某简谐振动规律为 初始条件为 ,求该振动的初相位.](http://slidesplayer.com/slide/11227924/60/images/24/%5B%E4%BE%8B%E9%A2%983%5D+%E6%9F%90%E7%AE%80%E8%B0%90%E6%8C%AF%E5%8A%A8%E8%A7%84%E5%BE%8B%E4%B8%BA+%E5%88%9D%E5%A7%8B%E6%9D%A1%E4%BB%B6%E4%B8%BA+%EF%BC%8C%E6%B1%82%E8%AF%A5%E6%8C%AF%E5%8A%A8%E7%9A%84%E5%88%9D%E7%9B%B8%E4%BD%8D..jpg "[解] 由初始条件得.")
25
3.简谐振动的速度和加速度 速度比加速度相位落后 位移比速度相位落后 弹性力

26
§9.2.2 简谐振动的 x-t 图线和相轨迹 1. x-t 图线 振幅大小决定曲线的“高低”,频率影响曲线的“密集和疏散”. t x O
初相位 = 0 t x O

27
2. 相轨迹(相图) O x vx
 O x vx")
28
§9.2.3 简谐振动矢量表示 ω0 x 动画演示 矢量末端在x 轴上投影点的运动规律:

29
[例题4] 如图右方表示 某简谐振动的 x-t 图,试用作图方法画出 t1 和 t2 时刻的旋转矢量的位置.
[解] t x O t1 t2 P1 P2 x O A A B B
![[例题4] 如图右方表示 某简谐振动的 x-t 图,试用作图方法画出 t1 和 t2 时刻的旋转矢量的位置.](http://slidesplayer.com/slide/11227924/60/images/29/%5B%E4%BE%8B%E9%A2%984%5D+%E5%A6%82%E5%9B%BE%E5%8F%B3%E6%96%B9%E8%A1%A8%E7%A4%BA+%E6%9F%90%E7%AE%80%E8%B0%90%E6%8C%AF%E5%8A%A8%E7%9A%84+x-t+%E5%9B%BE%EF%BC%8C%E8%AF%95%E7%94%A8%E4%BD%9C%E5%9B%BE%E6%96%B9%E6%B3%95%E7%94%BB%E5%87%BA+t1+%E5%92%8C+t2+%E6%97%B6%E5%88%BB%E7%9A%84%E6%97%8B%E8%BD%AC%E7%9F%A2%E9%87%8F%E7%9A%84%E4%BD%8D%E7%BD%AE..jpg "[解] t. x. O. t1. t2. P1. P2. x. O. A A. B. B")
30
§9.3简谐振动的能量转换

31
§9.3简谐振动的能量转换 以水平的弹簧振子为例 x O = 0 动能 势能

32
总能 E A 2 1 k = Ek EP t O O x t A = cos ω0 动画演示 总机械能守恒,即总能量不随时间变化.

33
结论 (1) 任一简谐振动总能量与振幅的平方成正比. (2) 总能量不变.弹簧振子的动能和势能的平均值 相等,且等于总机械能的一半.
(3) 振幅不仅给出简谐振动运动的范围,而且 还反映了振动系统总能量的大小及振动的强度. (4) Ek与Ep 相位相反. (5) Ek与Ep的变化频率都是原频率的两倍. 这些结论同样适用于任何简谐振动.
 振幅不仅给出简谐振动运动的范围,而且. 还反映了振动系统总能量的大小及振动的强度. (4) Ek与Ep 相位相反. (5) Ek与Ep的变化频率都是原频率的两倍. 这些结论同样适用于任何简谐振动.")
34
[例题1] 弹簧振子水平放置,克服弹簧拉力将质点自平衡位置移开 m,弹簧拉力为24N,随即释放,形成简谐振动。计算:(1)弹簧振子的总能;(2)求质点被释放后,行至振幅一半时,振子的动能和势能.
[解](1) A=0.04 m (2) 取平衡位置为势能零点,行至振幅一半时相位为60
![[例题1] 弹簧振子水平放置,克服弹簧拉力将质点自平衡位置移开 m,弹簧拉力为24N,随即释放,形成简谐振动。计算:(1)弹簧振子的总能;(2)求质点被释放后,行至振幅一半时,振子的动能和势能.](http://slidesplayer.com/slide/11227924/60/images/34/%5B%E4%BE%8B%E9%A2%981%5D+%E5%BC%B9%E7%B0%A7%E6%8C%AF%E5%AD%90%E6%B0%B4%E5%B9%B3%E6%94%BE%E7%BD%AE%EF%BC%8C%E5%85%8B%E6%9C%8D%E5%BC%B9%E7%B0%A7%E6%8B%89%E5%8A%9B%E5%B0%86%E8%B4%A8%E7%82%B9%E8%87%AA%E5%B9%B3%E8%A1%A1%E4%BD%8D%E7%BD%AE%E7%A7%BB%E5%BC%80+m%EF%BC%8C%E5%BC%B9%E7%B0%A7%E6%8B%89%E5%8A%9B%E4%B8%BA24N%EF%BC%8C%E9%9A%8F%E5%8D%B3%E9%87%8A%E6%94%BE%EF%BC%8C%E5%BD%A2%E6%88%90%E7%AE%80%E8%B0%90%E6%8C%AF%E5%8A%A8%E3%80%82%E8%AE%A1%E7%AE%97%3A%EF%BC%881%EF%BC%89%E5%BC%B9%E7%B0%A7%E6%8C%AF%E5%AD%90%E7%9A%84%E6%80%BB%E8%83%BD%EF%BC%9B%EF%BC%882%EF%BC%89%E6%B1%82%E8%B4%A8%E7%82%B9%E8%A2%AB%E9%87%8A%E6%94%BE%E5%90%8E%EF%BC%8C%E8%A1%8C%E8%87%B3%E6%8C%AF%E5%B9%85%E4%B8%80%E5%8D%8A%E6%97%B6%EF%BC%8C%E6%8C%AF%E5%AD%90%E7%9A%84%E5%8A%A8%E8%83%BD%E5%92%8C%E5%8A%BF%E8%83%BD..jpg "[解](1) A=0.04 m. (2) 取平衡位置为势能零点,行至振幅一半时相位为60")
35
可利用机械能守恒定律求出简谐振动的运动学方程.
积分既得 令

36
[例题2] 弹簧振子如图所示,弹簧原长L,质量ms,劲度系数k,振子质量m,计算弹簧振子系统的固有频率.
[解] 以弹簧子自由伸长处为原点建立坐标Ox,距弹簧固定端l 处取一元段d l.振子发生位移x, 则dl 段的动能 x O l dl 等效质量
![[例题2] 弹簧振子如图所示,弹簧原长L,质量ms,劲度系数k,振子质量m,计算弹簧振子系统的固有频率.](http://slidesplayer.com/slide/11227924/60/images/36/%5B%E4%BE%8B%E9%A2%982%5D+%E5%BC%B9%E7%B0%A7%E6%8C%AF%E5%AD%90%E5%A6%82%E5%9B%BE%E6%89%80%E7%A4%BA%2C%E5%BC%B9%E7%B0%A7%E5%8E%9F%E9%95%BFL%EF%BC%8C%E8%B4%A8%E9%87%8Fms%EF%BC%8C%E5%8A%B2%E5%BA%A6%E7%B3%BB%E6%95%B0k%EF%BC%8C%E6%8C%AF%E5%AD%90%E8%B4%A8%E9%87%8Fm%EF%BC%8C%E8%AE%A1%E7%AE%97%E5%BC%B9%E7%B0%A7%E6%8C%AF%E5%AD%90%E7%B3%BB%E7%BB%9F%E7%9A%84%E5%9B%BA%E6%9C%89%E9%A2%91%E7%8E%87..jpg "[解] 以弹簧子自由伸长处为原点建立坐标Ox,距弹簧固定端l 处取一元段d l.振子发生位移x, 则dl 段的动能. x. O. l. dl. 等效质量.")
37
弹簧振子系统的总质量 系统的固有频率

38
§9.4简谐振动的合成 §9.4.1 同方向同频率简谐振动的合成 §9.4.2 同方向不同频率简谐振动的合成
§9.4.3 互相垂直相同频率简谐振动的合成 §9.4.4 互相垂直不同频率简谐振动的合成 ·李萨如图形

39
§9.4简谐振动的合成 §9.4.1 同方向同频率简谐振动的合成 两谐振动 合位移 利用三角公式展开再合并得
结论:同方向、同频率两简谐振动的合成,合运动仍是同频率的简谐振动.

40
其中 用旋转矢量法同样得上述结果 2 1

41
相位差 反映了两谐振的步调关系. 两振动步调一致,同达最大,同达平衡 . 动画演示

42
两振动步调反向, (3) 一般情况下, 动画演示 两个振动的相位差对合 振动起着重要作用.
 一般情况下, 动画演示 两个振动的相位差对合 振动起着重要作用.")
43
§9.4.2同方向不同频率简谐振动的合成 1.合成 两谐振动 设 合位移
可用两分振动的位移时间曲线得出合振动的位移时间曲线,合振动不再是简谐振动,但却有周期性.

44
t x O T1= 2s t x O T1= 2s t x O T2= 6s t x O T2= 3s t x O T = 6s t x O T = 6s

45
合振动周期称主周期,主周期有两个特点: (1)主周期是分振动周期的整数倍, (2)主周期是分振动周期的最小公倍数. 2. 拍 合振动 设 随 t 变化慢 ——准简谐振动. 随t 变化快
主周期是分振动周期的整数倍, (2)主周期是分振动周期的最小公倍数. 2. 拍 合振动 设 随 t 变化慢 ——准简谐振动. 随t 变化快")
46
准简谐振动的圆频率 振幅 振幅调制圆频率 拍——频率较大但相差不大的两个同方向简谐振动合成时产生合振动振幅周期性变化的现象.

47
=2 拍频——单位时间内振动加强或减弱的次数. x1 ν1=16 ν2=18 x2 x 0.25s 0.75s 0.50s 动画演示 t
Δ =2 动画演示

48
§9.4.3互相垂直相同频率简谐振动的合成 两谐振动 消去 t 合成轨迹一般为一椭圆, 两振幅相等时为圆. 具体的来说:形状由相差决定.

49
(1)分振动相位相同或相反,全振动轨迹蜕化为直线
x y 轨迹为过原点的直线 时刻t 质点离开平衡位置的位移(合振动) ——合振动也是谐振动
 ——合振动也是谐振动.")
50
x y 亦为简谐振动. (2) 正椭圆或圆.
 正椭圆或圆.")
51
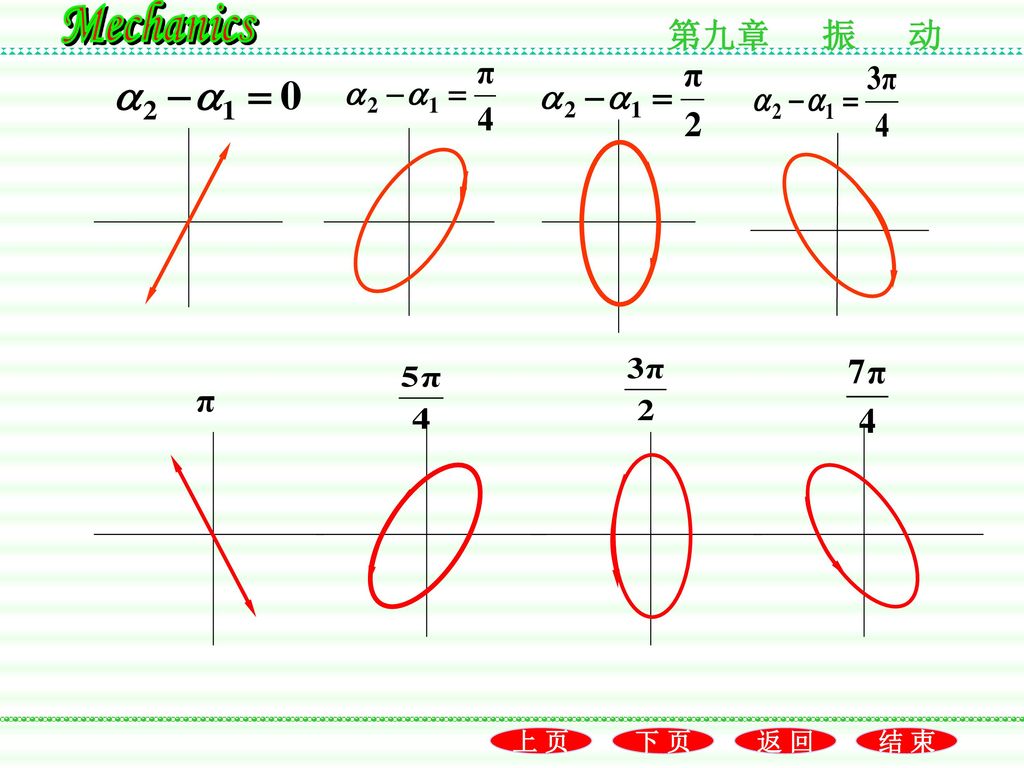
(3) 为其它值,合振动的轨迹表现为方位与形状各不相同的椭圆,质点运动方向亦各异.
质点沿顺时针方向运动 质点沿逆时针方向运动 说明:任何一个直线简谐振动,椭圆运动或匀速圆周运动都可分解为两个相互垂直的简谐振动. 动画演示

53
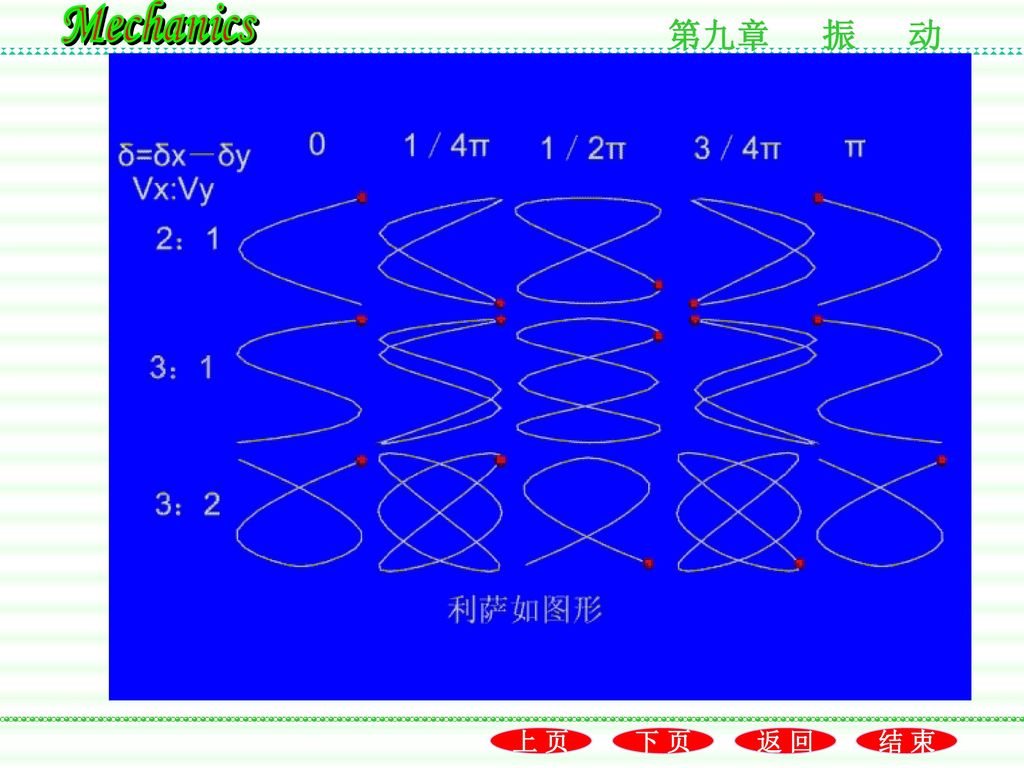
§9.4.4互相垂直不同频率简谐振动的合成· 李萨如图形 当频率为整数比时: 动画演示1 动画演示2 其合轨迹为李萨如图. 动画演示3
当频率为无理数比时: 其合成运动将永远不重复已走过的路径,它的轨迹将逐渐密布在振幅所限定的整个矩形面内. 这种非周期性运动称为准周期运动.

55
§9.5 振动的分解 1. 周期运动的分解 2.非周期函数的分解

56
§9.5 振动的分解 1. 周期运动的分解 设某物理量随时间周期性变化可表示为 其中 ——傅里叶级数 k=1为基频振动, k次谐频振动.

57
傅里叶系数 设 或

58
x 若有k个分振动,其频率都是某最低频率分振动(称基频振动)的倍频(两倍、三倍……)振动,则合振动仍为周期运动,其周期与基频振动的周期相等.
方波傅里叶级数 x t

59
将任一复杂振动分解成许多简谐振动的方法,称为频谱分析.
以简谐振动的频率为横坐标,以相应的振幅为纵坐标所作的图解,称为该振动的频谱.是分立谱. ω 5ω 3ω O A 分立谱 频谱

60
2.非周期函数的分解 当 x = f(t) 为非周期性函数时,则 傅里叶系数 由 f (t) 决定 频谱为连续谱.
 为非周期性函数时,则 傅里叶系数 由 f (t) 决定 频谱为连续谱.")
61
§9.6 阻尼振动 §9.6.1 运动方程及其解

62
§9.6.1 运动方程及其解 1. 动力学方程 阻尼振动——振幅(或能量)随时间不断减少的振动. 能量减少的原因: 摩擦阻尼和辐射阻尼.
为方便,均视为摩擦阻尼,设: 恢复力 (胡克定律) 阻尼力 为阻尼系数,与物体的形状以及周围性质有关. 对水平弹簧振子
 阻尼力. 为阻尼系数,与物体的形状以及周围性质有关. 对水平弹簧振子.")
63
令 0为固有频率, 为阻尼因数 根据阻力大小的不同,此式的解有三种不同形式,相应就代表三种运动状态.

64
2. 运动学特征 (1)欠阻尼振动 其解: t x o A 其中: —振幅随时间衰减 —周期振动 阻尼越小,越接近谐振动 阻尼越大,“周期”越长 准周期 动画演示
欠阻尼振动 其解: t x o A 其中: —振幅随时间衰减 —周期振动 阻尼越小,越接近谐振动 阻尼越大, 周期 越长 准周期 动画演示")
65
(2) 过阻尼状态(阻尼大) 其解: c1、c2是由初始条件定的常数. 此时物体不再作振动,以非周期运动的方式慢慢回到平衡位置,如弹簧振子放入粘性大的油中.具体运动过程与初速v0有关. 动画演示
 过阻尼状态(阻尼大) 其解: c1、c2是由初始条件定的常数. 此时物体不再作振动,以非周期运动的方式慢慢回到平衡位置,如弹簧振子放入粘性大的油中.具体运动过程与初速v0有关. 动画演示")
66
(3) 临界阻尼状态 一般解: c1、c2亦由初始条件定.振动物体从静止开始运动回复到平衡位置时最短. 动画演示 过阻尼 临界阻尼 欠阻尼 t x O
 临界阻尼状态 一般解: c1、c2亦由初始条件定.振动物体从静止开始运动回复到平衡位置时最短. 动画演示 过阻尼 临界阻尼 欠阻尼 t x O")
67
§9.7 受迫振动 §9.7.1 受迫振动的动力学方程 §9.7.2 受迫振动的运动特征 §9.7.3 位移共振
§9.7.4 受迫振动的能量转换 §9.7.5 速度共振

68
§9.7 受迫振动 §9.7.1 受迫振动的动力学方程 受迫振动——振动系统在周期性外界强迫力作用下的振动. 1. 动力学方程 设驱动力
F0为力幅 对弹簧振子 令 得 (9.7.1 )
")
69
2. 受迫振动演示实验 动画演示

70
§9.7.2受迫振动的运动特征 在小阻尼情况,式(9.7.1 )的通解为: 为纯阻尼振动 不随 t 衰减, 稳态解 t此项为零
经一段时间,振子达稳定振动状态,其特点: (1) 频率与驱动力频率相同. (2) 并非决定于初始条件,是稳定振动的位移与驱动力的相位差.
 频率与驱动力频率相同. (2) 并非决定于初始条件,是稳定振动的位移与驱动力的相位差.")
71
(3) A0由固有参量决定 t x
 A0由固有参量决定 t x")
72
§9.7.3 位移共振 位移共振——振动系统受迫振动时,其振幅达极大值的现象. A0 ω0 O ωr 由 得共振频率 (位移共振条件 )
共振时位移与驱动力的相位差

73
§9.7.4受迫振动的能量转换 1. 在 0、r 0时,驱动力与振动系统的速度有相位差,当驱动力的正负号与速度的正负号相反时,驱动力作负功.驱动力有时作正功,有时作负功,而阻力永远作负功,因而系统的机械能不守恒,在未达到稳态振动以前,若一个周期内,驱动力作的功大于阻力的作的负功的绝对值,振幅将增大,阻力在一个周期内作的负功的绝对值也将增大,最终会达到稳态振动,此时在一个周期内,驱动力作的功正好等于阻力作的负功的绝对值.如果情况相反,一个周期内驱动力作的功小于阻力作的负功的绝对值,振幅将减小,最终也会达到稳态振动.

74
2. 在 0,r=0时, =2,发生速度共振,稳态振动的位移的振动相位比驱动力落后 ,速度的振动相位与驱动力同。此时,驱动力总作正功,而阻力总与速度反向总作负功.驱动力与阻力始终反相位,能保持稳态振动的振幅恒定不变,只能是驱动力与阻力刚好相抵.

75
§9.7.5 速度共振 受迫振动的速度在一定条件下也可以发生共振叫速度共振(速度振幅最大). 速度共振条件 v0=ωA0 O ω0 =ω
不同物理量有不同的共振条件.

76
§9.8 “不守规矩”的摆混沌行为 §9.8.1 “不守规矩”的摆 §9.8.2 依赖初值的两种情况

77
§9.8“不守规矩”的摆混沌行为 §9.8.1 “不守规矩”的摆 A B E W L D R 扭摆装置示意图,虚线表示在圆盘的后面

78
以均质圆盘及其上的配重为研究对象 x y O O1 O2 W r W0 重力矩 阻力矩 恢复力矩 驱动力矩 由转动定理 联立得 (9.8.1) 将(9.8.1)无量纲化
 将(9.8.1)无量纲化")
79
令 其中 当摆角为大时 经整理(9.8.1)改为 (9.8.2) ——扭摆动力学方程 (9.8.2)为非线性方程,用计算机求数值解分析其运动,表现出其长期行为不可预报,呈现随机性.
改为 (9.8.2) ——扭摆动力学方程 (9.8.2)为非线性方程,用计算机求数值解分析其运动,表现出其长期行为不可预报,呈现随机性.")
80
§9.8.2 依赖初值的两种情况 1.一般的依赖初值 其运动可“重现”,可“预报”. 2.敏感依赖初值 对初值的敏感性是混沌运动的基本特征.
混沌是决定论描述的系统“内在(内禀)随机性”的表现.
随机性 的表现.")
81
§9.9 参数振动自激振动 §9.9.1 参数振动 §9.9.2 自激振动

82
§9.9 参数振动自激振动 §9.9.1 参数振动 参数振动(参变振动)——改变系统参数而进行的振动. 如改变单摆的摆长可改变单摆的参数.
振幅a , l0为 t =/2时的摆长.

83
动力学方程 或 很小 ,有 或 动画演示 和 l 0 的取值不同,系统会有性质不同的运动.

84
§9.9.2 自激振动 自激振动是因系统自身固有性质(如琴弦的弹力)而从恒定的外界能源(如手持弓以恒速拉动)补充能量,维持持续的振动. O
x P

Similar presentations

 ,飯類,蕃薯等食物 也就是一般所稱的 主食 ( 蘿蔔不是這一類,是屬於蔬菜類喔! ) 飲食建議吃三到六碗 並推薦攝取全穀類食品.>")



 。 離職儲金或勞工退休金 依勞工退休金條例相關規定,>")








又第 二十度蟬聯冠軍,而且是每四名死 亡人口中,就有一人「因癌而」,>")




 主讲人:周明强.>")