Download presentation
Presentation is loading. Please wait.

1
范玉峰 Fanyf(at)ynao.ac.cn 云南天文台 丽江观测站 http://www.gmg.org.cn 2011 贵阳
丽江BOOTES-4自主天文台 范玉峰 Fanyf(at)ynao.ac.cn 云南天文台 丽江观测站 2011 贵阳
ynao.ac.cn. 云南天文台 丽江观测站 贵阳.")
2
主要内容 China-RAON计划 Burst Optical Observer and Transient Exploring System介绍 丽江BOOTES-4项目 BOOTES-4进度和计划 参与BOOTES合作

3
程控自主天文台 野外台站、变源长期监测、机会源余辉观测需求。
China-RAON计划 程控自主天文台 野外台站、变源长期监测、机会源余辉观测需求。 Robotic Autonomous Observatory(RAO)遍地开花、结果。 中国程控自主天文台-丽江节点计划 ?。
遍地开花、结果。 中国程控自主天文台-丽江节点计划 ?。")
4
需求与技术 数据的交互处理,反馈环节的深度>>数据源和质量控制 野外选址和长期观测的专用设备
China-RAON计划 需求与技术 数据的交互处理,反馈环节的深度>>数据源和质量控制 野外选址和长期观测的专用设备 逾越“远程观测”与“程控自主”间的技术鸿沟(遥控飞机和无人机的区别) 硬件是保障 软件是关键
 硬件是保障. 软件是关键.")
5
China-RAON计划 技术路线 四步走: 学习、目标、尝试、完善 技术方案: 开源系统(如RTS) vs. 商业软件(ACP)
 vs. 商业软件(ACP)")
6
BOOTES自主天文台网络 BOOTES介绍
BOOTES: Burst Optical Observer and Transient Exploring System (A world wide Network of Robotic Telescopes)
")
7
GRB及其观测的意义 GRB是宇宙空间γ射线短时间突然增加的现象。
GRB时间特征:波形复杂;持续时间1ms-1000s;变化的时标1ms,甚至0.1ms。 一般认为GRB长暴主要起源于大质量恒星塌缩过程,短暴则与致密星并合有关,各向同性能量1053erg。 GRB余辉(GRB970228)发现使对GRB的观测获得极大进步,按主流理论,喷流撞击到暴源周围的气体或尘埃时会形成余辉,同时喷流的反向激波形成激闪(Peter Meszaros),喷流前导会随速度降低而释放X射线与可见光,可以确定伽玛暴的红移。
发现使对GRB的观测获得极大进步,按主流理论,喷流撞击到暴源周围的气体或尘埃时会形成余辉,同时喷流的反向激波形成激闪(Peter Meszaros),喷流前导会随速度降低而释放X射线与可见光,可以确定伽玛暴的红移。")
8
GRB观测的难点 GRB持续时间短,短暴少于2秒 空间时间分布随机 GRB本身除短暂发生的γ射线外,几乎没有其他波段的对应体
定位精度低,难以确认对应天体,认为与超新星成协 现有余辉模型需要观测从极端相对论、高辐射到非相对论、绝热阶段的变化过程,Swift标称反应约在100秒,但是60s以内的光变几乎来不及探测,2012年UFFO标称60秒? GCN地面观测网及VO-GCN标准化天文瞬变事件通知机制

9
GRB探测率和暴发率 理想状态下,地球上每天可探测到两到三个伽玛暴 上世纪70年代Vela,探测率10-20个/年;
80年代 个; 90年代康普顿伽玛射线天文台探测率为300, BeppoSAX和HETE-2为50个左右, 2005年至2010年Swift探测到超过500个,85%探测到X射线,约60%探测到光度,164个探测到红移,以及定位了52个短暴 2008升空的Fermi望远镜对伽玛暴的探测率近150个

10
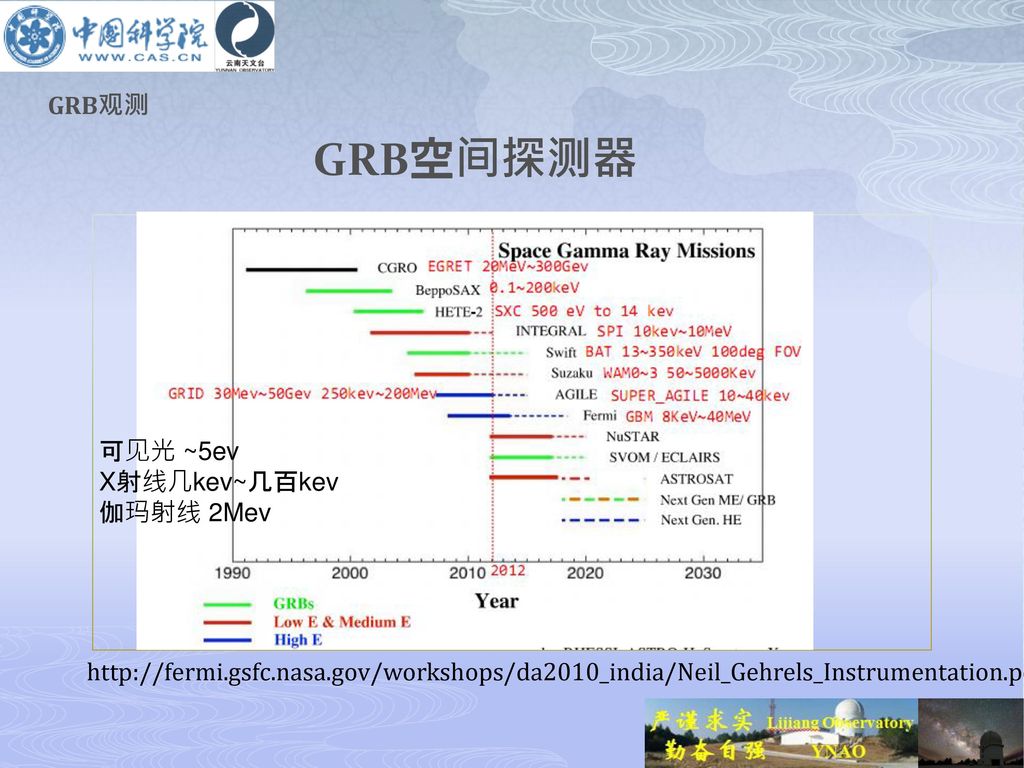
GRB空间探测器 GRB观测 可见光 ~5ev X射线几kev~几百kev 伽玛射线 2Mev
11
GRB光学余辉探测 GRB观测 GRB990123的余辉光变曲线和伽玛射线曲线 ROTSE拍摄的光学图像
来自

12
GRB观测 GRB光学极早期余辉探测 60S以前的数据是什么情况?

13
GCN:The Gamma-ray Coordinates Network 1997
(VO-GCN NASA 2008) PS:GCN,当年的BACODINE。由于CGRO的BATSE的记录设施损坏,因此无法象预计的那样定期经由跟踪和数据传输卫星系统中转将数据批量传回地面,只好随时解决传输问题。
 PS:GCN,当年的BACODINE。由于CGRO的BATSE的记录设施损坏,因此无法象预计的那样定期经由跟踪和数据传输卫星系统中转将数据批量传回地面,只好随时解决传输问题。")
14
The GCN Various Source of GRB Locations
(Current Missions) SOURCE TIME DELAY ERROR BOX SIZE RATE COMMENTS IPN_POS days 5-20' dia 3/month Small FOV telescopes INTEGRAL_WAKEUP 60 sec 10' 1/month Small FOV. INTEGRAL_REFINED sec 5' INTEGRAL_OFFLINE sec 3-5' Swift-BAT_POS 13-40 sec(1) 1-5' dia 2/week Fast and Small. Swift-XRT_POS 30-80 sec(1) 5" dia Swift-UVOT_POS 0.2-9 hrs(1) 2" dia 1/week SuperAGILE 20-40 sec 20' dia Fermi-GBM 20 sec 4-10 deg dia 15/month Large FOV telescopes. Fermi-LAT 100 sec 10-30' dia Small FOV telescopes. MAXI_Unknown 2-200 min 1deg dia MAXI_Known 0.5deg dia
 SOURCE. TIME DELAY. ERROR BOX SIZE. RATE. COMMENTS. IPN_POS days dia. 3/month. Small FOV telescopes. INTEGRAL_WAKEUP. 60 sec. 10 1/month. Small FOV. INTEGRAL_REFINED sec. 5 INTEGRAL_OFFLINE sec. 3-5 Swift-BAT_POS sec(1) 1-5 dia. 2/week. Fast and Small. Swift-XRT_POS sec(1) 5 dia. Swift-UVOT_POS hrs(1) 2 dia. 1/week. SuperAGILE sec. 20 dia. Fermi-GBM. 20 sec deg dia. 15/month. Large FOV telescopes. Fermi-LAT. 100 sec dia. Small FOV telescopes. MAXI_Unknown min. 1deg dia. MAXI_Known. 0.5deg dia.")
15
GRB COORDINATES DISTRIBUTION METHODS
GCN及地面观测网 GRB COORDINATES DISTRIBUTION METHODS TIME DELAY METHOD/MEDIA COMMENTS sec Socket (160B binary) Fast & suited for automated instruments. Socket (VOEvent XML) 2-30 sec L-mail (text) To any network address 5-100 sec (text) (XML) 5-180 sec Pager RA,Dec,UT,Intensity displayed on your cellphone/pager. Short Pager RA & Dec displayed on your cellphone/pager. Subject-only RA & Dec displayed in the Subject-line to your cell/pager. SubjHHMM-only RA, Dec, Time, & Intensity displayed in the Subject-line in RA=HH:MM:SS format. 0.3 sec Dedicated phone Continuous phone/modem connection. (no longer available) 30-90 sec Dialed phone Slower but much cheaper than Dedicated. (no longer available)
 Fast & suited for automated instruments. Socket (VOEvent XML) 2-30 sec. L-mail (text) To any network address sec. (text) (XML) sec. Pager. RA,Dec,UT,Intensity displayed on your cellphone/pager. Short Pager. RA & Dec displayed on your cellphone/pager. Subject-only. RA & Dec displayed in the Subject-line to your cell/pager. SubjHHMM-only. RA, Dec, Time, & Intensity displayed in the Subject-line in RA=HH:MM:SS format. 0.3 sec. Dedicated phone. Continuous phone/modem connection. (no longer available) sec. Dialed phone. Slower but much cheaper than Dedicated. (no longer available)")
16
GRB COORDINATES DISTRIBUTION Format
GCN及地面观测网 GRB COORDINATES DISTRIBUTION Format Swift Notice example GCN/IPN example

17
地基伽玛暴监测网 GCN及地面观测网 联网接收GCN数据的中小型望远镜网
ROTSE GRB 促成喷流说的兴起,ROTSE-III 45cm 2.6°FOV,35°/秒 Super-LOTIS 17″x17” FOV,60cm,极限星等18.5等(60s曝光),典型响应时间小于25秒,覆盖爆发最初几十秒到几小时的红外CCD及多色测光 RAPTOR 4X85mm+1X400mm(4°X4°)其中85mm镜头作实时数据反馈闭环分析,200度/秒,发现GRB041219A爆发光学闪 KAIT Lick天文台,76cm,全套滤光片,6.7′X6.7′,21.5m(300s) REM La Silla意大利国家天体物理研究所项目 60厘米快速反应望远镜,2002年 10´X10´, GROND 马普学会2.2米望远镜上的7通道照相机,近红外波段,确定伽玛暴测光红移 参考:
,典型响应时间小于25秒,覆盖爆发最初几十秒到几小时的红外CCD及多色测光. RAPTOR 4X85mm+1X400mm(4°X4°)其中85mm镜头作实时数据反馈闭环分析,200度/秒,发现GRB041219A爆发光学闪. KAIT Lick天文台,76cm,全套滤光片,6.7′X6.7′,21.5m(300s) REM La Silla意大利国家天体物理研究所项目 60厘米快速反应望远镜,2002年 10´X10´, GROND 马普学会2.2米望远镜上的7通道照相机,近红外波段,确定伽玛暴测光红移. 参考:")
18
EAFON East-Asia GRB Follow-up Observation Network GCN及地面观测网
2004年成立,包括日本木曾天文台的1米望远镜、日本理化研究所的WIDGET、中国国家天文台兴隆观测站的80厘米TNT望远镜、1米EST望远镜和2.16米望远镜、云南天文台高美古观测站的2.4米望远镜、台湾鹿林天文台的1米望远镜,及韩国普贤山光学天文台的1.8米望远镜 反应速度最快的是TNT,1分钟多,多站联合,基本上可以保证每天至少有一个台址拥有可观测的晴夜

19
GCN及地面观测网 RoboNet-1.0 英国利物浦John Moores大学,全球2米级望远镜网络,伽玛暴与系处行星搜索,TTL公司2m级全自动大型望远镜,最快响应时间2至5分钟,斯隆标准滤光片,低分辨率光谱仪, 利物浦望远镜还有偏振计RINGO与红外照相机

20
发展历史 西班牙安达卢西亚天体物理研究所发起的全球范围的全自动天文望远镜 BOOTES-1 1998 First Light
BOOTES-2, BOOTES-3, BOOTES-IR BOOTES

21
BOOTES介绍 仪器配置( ) Commercial Nikkor 50-mm wide-field lens, attached to two ST8 SBIG CCD cameras, covering the error box of GRB source. Powerful DSP The frames taken at each station at the very beginning of the night will be loaded into memory (the primary frames). During the rest of the night, successive frames (secondary frames) could be compared with the primary frame, If a real flash were detected in the secondary frames, the coordinates of the flashing object and the images themselves would be transferred to LAEFF-INTA. Exceptionally, when information on a GRB position would be obtained from the GCN ,the cameras used to provide images of the corresponding GRB error boxes.
. During the rest of the night, successive frames (secondary frames) could be compared with the primary frame, If a real flash were detected in the secondary frames, the coordinates of the flashing object and the images themselves would be transferred to LAEFF-INTA. Exceptionally, when information on a GRB position would be obtained from the GCN ,the cameras used to provide images of the corresponding GRB error boxes.")
22
软件系统 BOOTES介绍 A modular software (1998-2004)
Simultaneous and quasi-simultaneous observations of the GRB error boxes sources from GCN (Electronic mail/Modem line/GSM/ Internet TCP/IP connection (0.1s~2s)). 1. Dome Control Monitor. Automatic dome opening system Meteorological data analysis: precipitations, temperature, humidity, sunrise and sunset. Remote control via GSM and SMS system: status report, system failures (blackouts, TCP/IP errors). Telescopes switch on and off. FTP client to supervise the observatory in the Internet by means of a webcam. 2. Telescope Control Monitor. - GRBs alerts receptions: Management of the telescopes’ automatic survey programs. client to send astronomical images. Optical Transient Monitor. Astronomical images acquisition through digital cameras: Regular sky monitoring in the I and V bands. Search for recurrent optical transient emissions. study of comets, meteors, asteroids, variables stars, novae, supernovae 3. Images Analysis Monitor. - Analysys and detection of optical flashes of cosmic origin client to send data of possible transient. 150 Gb database. The RTS2 Operating System (since 2004)
). 1. Dome Control Monitor. Automatic dome opening system. Meteorological data analysis: precipitations, temperature, humidity, sunrise and sunset. Remote control via GSM and SMS system: status report, system failures (blackouts, TCP/IP errors). Telescopes switch on and off. FTP client to supervise the observatory in the Internet by means of a webcam. 2. Telescope Control Monitor. - GRBs alerts receptions: Management of the telescopes’ automatic survey programs. client to send astronomical images. Optical Transient Monitor. Astronomical images acquisition through digital cameras: Regular sky monitoring in the I and V bands. Search for recurrent optical transient emissions. study of comets, meteors, asteroids, variables stars, novae, supernovae. 3. Images Analysis Monitor. - Analysys and detection of optical flashes of cosmic origin. client to send data of possible transient. 150 Gb database. The RTS2 Operating System (since 2004)")
23
BOOTES介绍 BOOTES系统框图

24
BOOTES介绍 观测结果 The observation of the GRB error box simultaneously to the GRB occurrence. The detection of optical flash (OTs) of cosmic origin. The observation of the sky in the I and V filters ,as a part of the preparations for the ESA’s satellite project INTEGRAL. BOOTES considered part of the preparations for the ESA's satellite project INTEGRAL( ). The monitoring of several objects.
. The monitoring of several objects.")
25
发展和计划 BOOTES介绍 Life cycle Observatory Location Primary mirror
CCD properties filters React time BOOTES-1A El Arenosillo (Spain) 0.2m F/10 40′X30′FOV 16° x 11° <14m (300s) <12m (30s) I ,V Within 1 minute (BeppoSAX,RossiXTE) 2001 BOOTES-1B (about 100m away from BOOTES-1A) 0.3m <18m 30′ x 20′ FOV Spectrographs 43′x28′ (<13.5m 30s) Wide field CCD 400 mm f/2.8 lens: 5°X 5°FOV I,R,V (BeppoSAX, RossiXTE, HETE-2, INTEGRAL and SWIFT)
 0.2m. F/10. 40′X30′FOV. 16° x 11° <14m (300s) <12m (30s) I ,V. Within 1 minute. (BeppoSAX,RossiXTE) BOOTES-1B. (about 100m away from BOOTES-1A) 0.3m. <18m. 30′ x 20′ FOV. Spectrographs 43′x28′ (<13.5m 30s) Wide field CCD 400 mm f/2.8 lens: 5°X 5°FOV. I,R,V. (BeppoSAX, RossiXTE, HETE-2, INTEGRAL and SWIFT)")
26
发展和计划2 BOOTES介绍 Life cycle Location Primary mirror CCD properties
filters React time 2001 BOOTES-2 La Mayora (Málaga,Spain ) 0.3m F/10 (2009) 0.6m F/8 <18m <20.5m (2011) <16m (Spectroscopy with COLORES) clear, Johnson R, Sloan g′ r′ i′ UKIRT Z and Y -band filters Within 1 minute 100deg/s,20deg/s2 (BeppoSAX, RossiXTE, HETE-2, INTEGRAL and SWIFT) 2004 BOOTES-IR/T60 Spain 2009 Near-IR( ) BOOTES-3 Vintage Lane, New Zealand RC EMCCD 10'x10' FOV With 10 second (INTEGRAL, SWIFT and FERMI) 2011 BOOTES-4 Lijiang, China
 0.3m. F/10. (2009) 0.6m. F/8. <18m. <20.5m. (2011) <16m. (Spectroscopy with COLORES) clear, Johnson R, Sloan g′ r′ i′ UKIRT. Z and Y -band filters. Within 1 minute. 100deg/s,20deg/s2. (BeppoSAX, RossiXTE, HETE-2, INTEGRAL and SWIFT) BOOTES-IR/T60. Spain Near-IR( ) BOOTES-3. Vintage Lane, New Zealand. RC. EMCCD. 10 x10 FOV. With 10 second. (INTEGRAL, SWIFT and FERMI) BOOTES-4. Lijiang, China.")
27
丽江BOOTES-4项目 合作机缘

28
BOOTES-4系统构成 丽江BOOTES-4项目 ASTELCO Mount NTM-502 Technical Description
Slewing Speed 20°/s Acceleration and Deceleration 20°/s2 Absolute positioning accuracy <5″ RMS Tracking accuracy without autoguider <1″/120 min Tracking accuracy with autoguider <0.3″ ASTELCO 0.6mRCLW Telescope Primary mirror diameter is 0.6m。The diameter of second mirror is 210mm ,focal ratio is F/8。 Andor scientific EMCCD camera (Andor iXon DU-888E-C00-#BV, which is a C-mount standard back illuminated device with 10,5 and pixels is 1024X1024, pixel size 13X13 ̊um; frame rate is 9(full frame per second);read noise 1 to
;read noise 1 to")
29
BOOTES-4系统构成2 丽江BOOTES-4项目
Enclosure: houses the telescope and all equipment, drive by electrical motor Axis & Web camera: monitor the whole observatory, observatory image is available via internet. Thies Rain sensor: type detect status of precipitation(rain, snow, hail etc.),drop size>0.2mm, switch-on within 50 sec for 1~15 incidences. Linux servers with RTS system: are used to control the telescope mount, dome, and other equipment. All computers can be accessed from internet. GCN alerts can trig the ToO observation. UPS two SUA3000RMI2U (3000VA ) connected to the computer through a serial port. The UPS will shut down the computer in case of persistent power failure and turn it on again when the power is recovery.
,drop size>0.2mm, switch-on within 50 sec for 1~15 incidences. Linux servers with RTS system: are used to control the telescope mount, dome, and other equipment. All computers can be accessed from internet. GCN alerts can trig the ToO observation. UPS two SUA3000RMI2U (3000VA ) connected to the computer through a serial port. The UPS will shut down the computer in case of persistent power failure and turn it on again when the power is recovery.")
30
BOOTES-4外观 丽江BOOTES-4项目 BOOTES Robotic Observatory BOOTES-4(BOOSTES-3)
equatorial mounting 0.6m-RC Telescope

31
运输与进口 BOOTES-4进展与计划 14-19th Oct. 2011, passed Nansa Port.
21st Oct., arrived Huangpu Port. 31th Oct., container arrived Kunming Customs. 2nd Nov., truck arrived Lijiang Observatory.

32
BOOTES-4 (parts) in Lijiang
 in Lijiang")
33
The expensive dust from Spain
BOOTES-4进展与计划 The expensive dust from Spain

34
BOOTES-4进展与计划 基建与三通

35
安装准备和计划 13.11 Germany and Spain team arrived Lijiang Observatory.
BOOTES-4进展与计划 安装准备和计划 13.11 Germany and Spain team arrived Lijiang Observatory. 14.11 Start installation. Finish dome installation. 21.11 Start telescope installation 25.11 Finish T. installation. 26.11 Start operation and all system testing. 3.12 End.

36
欢迎参与BOOTES合作 使用望远镜观测时间 10% on BOOTES-4 5% on BOOTES-X GRB等方面研究 RAO实验平台

37
谢谢! 预祝大会圆满成功!

Similar presentations



















