Download presentation
Presentation is loading. Please wait.

1
TSR智慧型機器人 基礎教材研習講義 主講人:張育誠 ˙智慧型機器人與應用實例 ˙單板電腦系統實作應用 ˙機械手臂與RF遙控器
˙動作群組的編輯 主講人:張育誠

2
機器人的定義 自身動力 聯合國標準化組織采納了美國機器人協會給機器人下的定義︰ TSR 台灣超級機器人 控制能力
機器人是靠 自身動力 和 控制能力 來實現各種功能的一種機器 聯合國標準化組織采納了美國機器人協會給機器人下的定義︰ “一種可編程和多功能的,用來搬運材料、零件、工具的操作機; 或是為了執行不同的任務而具有可改變和可編程動作的專門系統。”

3
智慧型機器人類型 TSR 台灣超級機器人 工業機器人 教育機器人 保全機器人 醫療機器人 娛樂機器人 服務機器人
R1 (利基, Taiwan) SeQ-1 (新光保全, Taiwan) 智慧型機器人 醫療機器人 娛樂機器人 服務機器人 瓦力 RIBA(東海橡膠, 日本) Roomba (iRobot, USA)
 SeQ-1 (新光保全, Taiwan) 智慧型機器人. 醫療機器人. 娛樂機器人. 服務機器人. 瓦力. RIBA(東海橡膠, 日本) Roomba (iRobot, USA)")
4
TSR 台灣超級機器人 機器人三大法則 艾西莫夫(Isaac Asimov, )二十世紀科幻文壇的超級大師,也是舉世聞名的全能通俗作家。是公認的「現代機器人小說之父」。他於一九四二年所創立的「機械人三大法則」: 第一法則 : 機器人不得傷害人類,或坐視人類受到傷害而袖手旁觀。 第二法則 : 除非違背第一法則,機器人必須服從人類的命令。 第三法則 : 在不違背第一法則及第二法則的情況下,機器人必須保護自己。
二十世紀科幻文壇的超級大師,也是舉世聞名的全能通俗作家。是公認的「現代機器人小說之父」。他於一九四二年所創立的「機械人三大法則」: 第一法則 : 機器人不得傷害人類,或坐視人類受到傷害而袖手旁觀。 第二法則 : 除非違背第一法則,機器人必須服從人類的命令。 第三法則 : 在不違背第一法則及第二法則的情況下,機器人必須保護自己。")
5
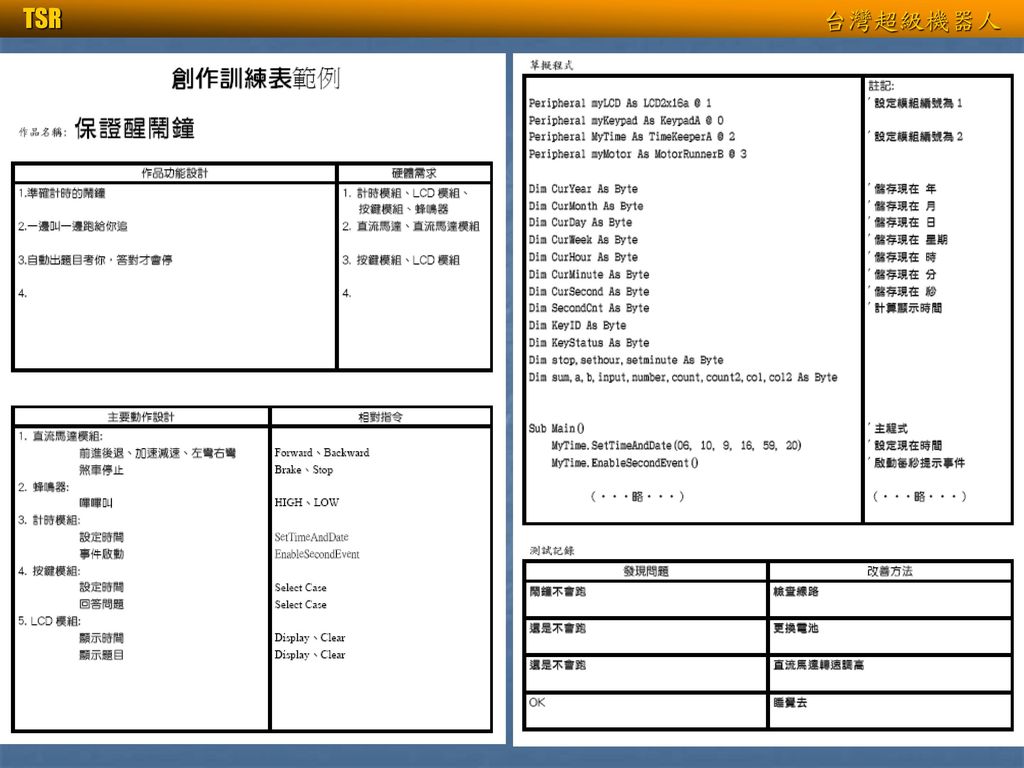
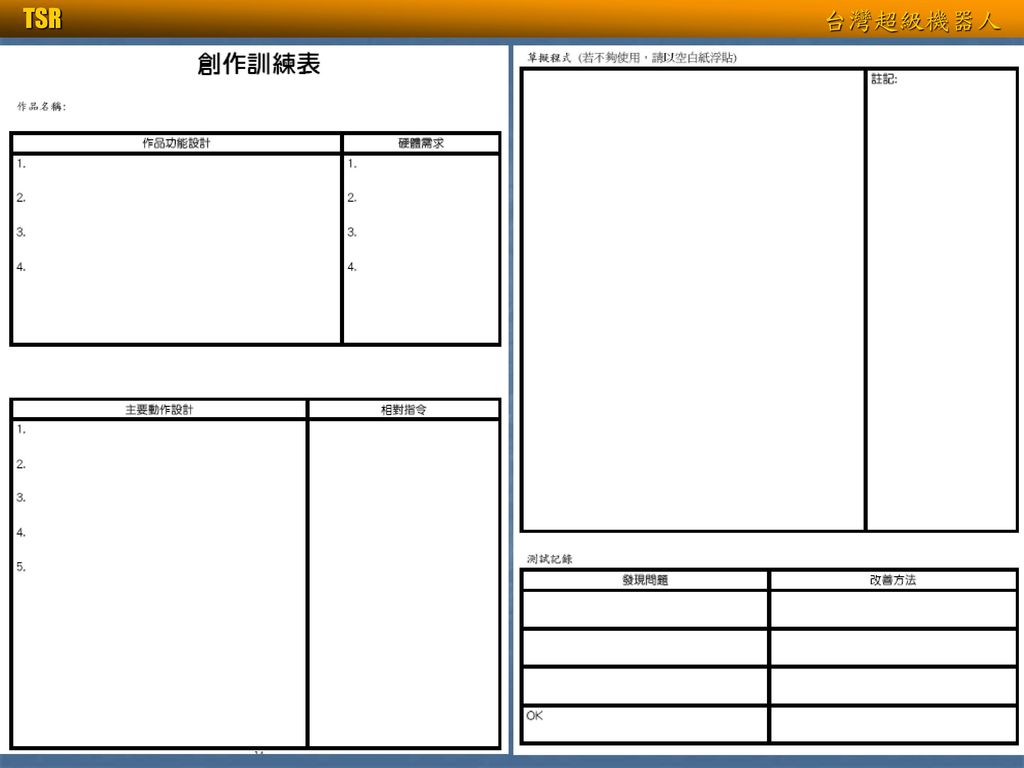
應用範例 輪型機器人 多足機械獸 人型機器人 ☉影片 ☉影片 ☉影片 工業用、快速原型展示、DIY玩家、發明家···
TSR 台灣超級機器人 應用範例 輪型機器人 (保證醒鬧鐘、循跡自走車···) ☉影片 ☉影片 ☉影片 多足機械獸 (六腳蜘蛛、趴趴走小螞蟻···) ☉影片 ☉影片 人型機器人 ☉影片 ☉影片 ☉影片 (無敵鐵金剛、變形金剛···) 工業用、快速原型展示、DIY玩家、發明家···
 ☉影片 ☉影片 ☉影片. 多足機械獸. (六腳蜘蛛、趴趴走小螞蟻···) ☉影片 ☉影片. 人型機器人 ☉影片 ☉影片 ☉影片. (無敵鐵金剛、變形金剛···) 工業用、快速原型展示、DIY玩家、發明家···")
6
單板電腦 (BC1) 把複雜的電腦 簡化成 一小片電路板 TSR 台灣超級機器人 Basic Commander 1
把複雜的電腦 簡化成 一小片電路板 ˙開發簡單化 -- 非工程人員專用 ˙產品個性化 -- 非大量生產產品 ˙開發極速化 -- 快速完成產品原型 ˙效能極大化 -- 功能模組結合 初學者 -- 簡易級入門教材 學生 -- 各項專題實作 教師 -- 協助研究實驗 嗜好者 -- 個人嗜好 DIY 設計工程師 -- 快速原型實現

7
TSR 台灣超級機器人 單板電腦系統

8
TSR 台灣超級機器人 返回

9
TSR 台灣超級機器人 單板電腦系統實作

10
TSR 台灣超級機器人 以模組方式控制機器人 cmdBUS USB

11
TSR 台灣超級機器人 控制直流馬達 cmdBUS USB 本單元請搭配課本研習

12
MotorRunnerB 直流馬達控制模組
模組控制實作 坦克車 動起來 MotorRunnerB 直流馬達控制模組

13
模組編號 應與指撥開關配合 宣告週邊模組 程式延遲時間 以毫秒計 無窮迴圈 馬達運轉強度 範圍 0 ~ 255
Peripheral MyMotor As 2 Sub main() Pause Do MyMotor. ForwardA(255) MyMotor. ForwardB(255) Pause MyMotor. BrakeDual Pause MyMotor. BackwardA(100) MyMotor. BackwardB(200) Pause MyMotor. StopDual Pause Loop End Sub 程式延遲時間 以毫秒計 無窮迴圈 馬達運轉強度 範圍 0 ~ 255
 Pause 3000 Do MyMotor. ForwardA(255) MyMotor. ForwardB(255) Pause 2000 MyMotor. BrakeDual Pause 1500 MyMotor. BackwardA(100) MyMotor. BackwardB(200) Pause 2000 MyMotor. StopDual Pause 1500 Loop End Sub. 程式延遲時間. 以毫秒計. 無窮迴圈. 馬達運轉強度. 範圍 0 ~ 255.")
14
綜合測驗 任務: 讓你的坦克走8字型前進 ( )1.要讓坦克空檔滑行,應該選用哪個指令
( )1.要讓坦克空檔滑行,應該選用哪個指令 (A) Brake (B) Stop (C) Forward (D) Backward ( )2.下列哪個指令可使程式延遲1.5秒 (A) Brake 1.5 (B) Stop 1.5 (C) Pause 1.5 (D) Pause 1500 ( )3. 下列哪一組指令不會使坦克轉向 (A) ForwardA(255) (B) BackwardA(255) (C) ForwardA(255) (D) ForwardA(255) BackwardB(255) BackwardB(128) ForwardB(128) ForwardB(255) ( )4.大華:ForwardA(200) 會使直流馬達正轉200秒。 中興:ForwardA(200) 會使直流馬達正轉0.2秒。 小明:ForwardA(200) 會比ForwardA(100)轉速快。 請問誰的說法比較正確? (A) 大華 (B) 中興 (C) 小明 (D) 以上皆非 ( )5. 「Peripheral MyMotor As 1」是宣告直流馬達位置的敘述,請問 (甲) (乙) 哪個字可以換成自己取的名字? (A)只有甲 (B)只有乙 (C)甲乙皆可 (D)甲乙皆不可 任務: 讓你的坦克走8字型前進
1.要讓坦克空檔滑行,應該選用哪個指令. (A) Brake (B) Stop (C) Forward (D) Backward. ( )2.下列哪個指令可使程式延遲1.5秒. (A) Brake 1.5 (B) Stop 1.5 (C) Pause 1.5 (D) Pause ( )3. 下列哪一組指令不會使坦克轉向. (A) ForwardA(255) (B) BackwardA(255) (C) ForwardA(255) (D) ForwardA(255) BackwardB(255) BackwardB(128) ForwardB(128) ForwardB(255) ( )4.大華:ForwardA(200) 會使直流馬達正轉200秒。 中興:ForwardA(200) 會使直流馬達正轉0.2秒。 小明:ForwardA(200) 會比ForwardA(100)轉速快。 請問誰的說法比較正確 (A) 大華 (B) 中興 (C) 小明 (D) 以上皆非. ( )5. 「Peripheral MyMotor As 1」是宣告直流馬達位置的敘述,請問. (甲) (乙) 哪個字可以換成自己取的名字 (A)只有甲 (B)只有乙 (C)甲乙皆可 (D)甲乙皆不可. 任務: 讓你的坦克走8字型前進.")
17
模組控制實作 您智零 我愛妳 Lcd2x16a 液晶顯示模組

18
TSR 台灣超級機器人 LCD液晶顯示模組 cmdBUS USB 本單元直接以講義研習

19
Peripheral myLCD As LCD2x16a @ 4
Sub Main() myLCD.DisplayOn() myLCD.SetBacklight(255) myLCD.Backlighton(0) Do myLCD.Display("TSR,I Love You!") Pause 3000 myLCD.RotateRight(1, 30) Pause 5000 myLCD.RotateLeft(1, 10) myLCD.RotateOff() myLCD.Clear() Loop End Sub 設定背光亮度 範圍0~255 255最亮 開啟液晶 顯示功能 點亮背光 背光秒數 0為恆亮 顯示訊息 字串要加” ” 變數不要加 第二列向左捲動 數字越小越快 第一列向右捲動 數字越大越慢 停止捲動 清除字幕
 myLCD.DisplayOn() myLCD.SetBacklight(255) myLCD.Backlighton(0) Do. myLCD.Display( TSR,I Love You! ) Pause myLCD.RotateRight(1, 30) Pause myLCD.RotateLeft(1, 10) myLCD.RotateOff() myLCD.Clear() Loop. End Sub. 設定背光亮度. 範圍0~ 最亮. 開啟液晶. 顯示功能. 點亮背光. 背光秒數. 0為恆亮. 顯示訊息. 字串要加 變數不要加. 第二列向左捲動. 數字越小越快. 第一列向右捲動. 數字越大越慢. 停止捲動. 清除字幕.")
20
綜合測驗 任務:讓你的坦克具備以下功能 當坦克快速前進(255)時,液晶顯示Forward 255 ,且向左捲動
( )1. myLcd.RotateRight(1, 2)與myLcd.RotateRight(2, 1)二個指令,皆可使myLcd的字幕 向右捲動,請問何者捲動較快?(A) (1, 2) (B) (2, 1) (C) 相同 (D) 不一定 ( )2.請問以下程式執行時,液晶顯示模組有何顯示?(A) J=1 (B) J=6 (C) J= J (D) "J="J 程式片段 : J=1 For I= 1 To 5 J= J + 1 Next myLCD.Display("J="J) 任務:讓你的坦克具備以下功能 當坦克快速前進(255)時,液晶顯示Forward 255 ,且向左捲動 當坦克慢速後退(180)時,液晶顯示Backward 180 ,且向右捲動 返回
1. myLcd.RotateRight(1, 2)與myLcd.RotateRight(2, 1)二個指令,皆可使myLcd的字幕. 向右捲動,請問何者捲動較快?(A) (1, 2) (B) (2, 1) (C) 相同 (D) 不一定. ( )2.請問以下程式執行時,液晶顯示模組有何顯示?(A) J=1 (B) J=6 (C) J= J (D) J= J. 程式片段 : J=1. For I= 1 To 5. J= J + 1. Next. myLCD.Display( J= J) 任務:讓你的坦克具備以下功能. 當坦克快速前進(255)時,液晶顯示Forward 255 ,且向左捲動. 當坦克慢速後退(180)時,液晶顯示Backward 180 ,且向右捲動. 返回.")
21
TSR 台灣超級機器人 按鍵輸入模組 cmdBUS USB 本單元直接以講義研習

22
myKeypad.GetKeyID(KeyID)
TSR 台灣超級機器人 Keypad 按鍵輸入模組 變數型態 Byte值域0~255 Integer值域 -32768~+32767 Word值域 0~65535 宣告變數型態 Peripheral myKeypad As 3 Dim KeyID As Byte Event myKeypad.KeypressedEvent() myKeypad.GetKeyID(KeyID) Debug “KeyID is:”,KeyID,CR End Event Sub main() myKeypad.SetKeypadmode(1) Pause 100 myKeypad.EnableKeypressedEvent() Do Loop End Sub 自訂的變數 事件開始處 在終端視窗 顯示訊息 取得鍵值 存放至KeyID中 事件結束處 游標換行 設定按鍵模式 共有9種模式 按壓事件開始有效 無窮迴圈
 myKeypad.GetKeyID(KeyID) Debug KeyID is: ,KeyID,CR. End Event. Sub main() myKeypad.SetKeypadmode(1) Pause 100. myKeypad.EnableKeypressedEvent() Do. Loop. End Sub. 自訂的變數. 事件開始處. 在終端視窗. 顯示訊息. 取得鍵值. 存放至KeyID中. 事件結束處. 游標換行. 設定按鍵模式. 共有9種模式. 按壓事件開始有效. 無窮迴圈.")
23
TSR 台灣超級機器人 常用的按鍵模式 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 A 4 5 6 B 7 8 9 C F E D Mode(0) 鍵值模式 Mode(1) 十六進制模式
 鍵值模式. Mode(1) 十六進制模式.")
24
綜合測驗 TSR 台灣超級機器人 任務: 讓你的坦克具備下列功能 液晶顯示 “X=” ,等待Keypad輸入數字後,液晶再顯示 “Y=”,
( )1. 若要啟動Event myKeypad.KeyPressedEvent (),應該使用哪個指令? (A) myKeypad.SetKeypadmode(1) (B) myKeypad.GetKeyID(KeyID) (C) myKeypad. EnableKeypressedEvent () (D) 以上皆非 ( )2. 若要宣告變數 i 成為 Byte 型態,應該如何敘述? (A) Peripheral i As Byte (B) Peripheral Byte As i (C) Dim i As Byte (D) Dim Byte As i 任務: 讓你的坦克具備下列功能 液晶顯示 “X=” ,等待Keypad輸入數字後,液晶再顯示 “Y=”, 等待Keypad輸入數字後,液晶再顯示 X+Y的答案(例如:3+2=5)
1. 若要啟動Event myKeypad.KeyPressedEvent (),應該使用哪個指令? (A) myKeypad.SetKeypadmode(1) (B) myKeypad.GetKeyID(KeyID) (C) myKeypad. EnableKeypressedEvent () (D) 以上皆非. ( )2. 若要宣告變數 i 成為 Byte 型態,應該如何敘述? (A) Peripheral i As Byte (B) Peripheral Byte As i. (C) Dim i As Byte (D) Dim Byte As i. 任務: 讓你的坦克具備下列功能. 液晶顯示 X= ,等待Keypad輸入數字後,液晶再顯示 Y= , 等待Keypad輸入數字後,液晶再顯示 X+Y的答案(例如:3+2=5)")
25
TSR 台灣超級機器人 計時模組 cmdBUS USB 本單元請搭配課本研習

26
U5 創作訓練 本單元請搭配課本研習

27
TSR 台灣超級機器人 以I/O方式控制機器人 cmdBUS USB I/O

28
TSR 台灣超級機器人 TSR_bot 先睹為快 習 作 車

29
內建2組直流馬達控制線路 可由BC1以I/O 方式直接控制 可加掛各式功能模組與 簡易I/O元件

30
TSR 台灣超級機器人 TSR_bot Board

31
TSR 台灣超級機器人 1. 電源指示燈 2. 變壓器電源輸入:外加電源VIN,可接上一個6V-12V DC電源供應器。 (勿與9V鈕扣電池電源同時使用) 3. 電源開關:滑動開關是用來開啟電源用。 4. Reset 鍵:用來重置BASIC Commander®,程式重新開始執行。 5. 3組伺服機腳座:3標記分別為P3、P4、P5,可讓使用者接上3個伺服機。(模組為選購品) (W: Signal, R: VCC, B:GND) 6. 3組紅外線模組腳座:3標記分別為P0、P1、P2,可讓使用者接上3組紅外線循跡模組。(模組為選購品) (R: VCC, W: Signal, B:GND) 7. 3組cmdBUS™ 腳座:可分別接上3條6線的cmdBUS™排線,用來連接利基科技的周邊模組。 8. I/O腳:提供P0~P13,合計14組。 (當紅外線循跡模組或伺服機接上時,其它元件應避免使用P0~P5這幾組I/O腳) 9. VCC Pins (Female Header) 透過BASIC Commander®穩壓成5伏特的電壓,其可提供的最大電流為250mA。(6組) 10. GND: 共用接地端。 /32-pin BASIC Commander®之32-Pin腳座: 不論是24-pin或32-pin的BASIC Commander®均可直接插在上面使用,特別注意插上BASIC Commander®時須依照板子上的方向提示圖案小心插上,避免因方向錯誤造成BASIC Commander®損壞。建議在關閉電源的情況之下插上BASIC Commander®,開啟電源前再次確認方向是否正確。 12. 電池輸入:外加電源VIN,使用者可接上一個9V的鈕扣電池。(電池為選購品) 13. 左馬達連接腳座:連接左方馬達使用。(紅色線朝上方) 14. 右馬達連接腳座:連接右方馬達使用。(紅色線朝上方)
 3. 電源開關:滑動開關是用來開啟電源用。 4. Reset 鍵:用來重置BASIC Commander®,程式重新開始執行。 5. 3組伺服機腳座:3標記分別為P3、P4、P5,可讓使用者接上3個伺服機。(模組為選購品) (W: Signal, R: VCC, B:GND) 6. 3組紅外線模組腳座:3標記分別為P0、P1、P2,可讓使用者接上3組紅外線循跡模組。(模組為選購品) (R: VCC, W: Signal, B:GND) 7. 3組cmdBUS™ 腳座:可分別接上3條6線的cmdBUS™排線,用來連接利基科技的周邊模組。 8. I/O腳:提供P0~P13,合計14組。 (當紅外線循跡模組或伺服機接上時,其它元件應避免使用P0~P5這幾組I/O腳) 9. VCC Pins (Female Header) 透過BASIC Commander®穩壓成5伏特的電壓,其可提供的最大電流為250mA。(6組) 10. GND: 共用接地端。 /32-pin BASIC Commander®之32-Pin腳座: 不論是24-pin或32-pin的BASIC Commander®均可直接插在上面使用,特別注意插上BASIC Commander®時須依照板子上的方向提示圖案小心插上,避免因方向錯誤造成BASIC Commander®損壞。建議在關閉電源的情況之下插上BASIC Commander®,開啟電源前再次確認方向是否正確。 12. 電池輸入:外加電源VIN,使用者可接上一個9V的鈕扣電池。(電池為選購品) 13. 左馬達連接腳座:連接左方馬達使用。(紅色線朝上方) 14. 右馬達連接腳座:連接右方馬達使用。(紅色線朝上方)")
32
TSR 台灣超級機器人 I/O控制:按鍵、LED、蜂鳴器 GND 地線 - - VCC 5V電源 I/O腳 - + - + P6 P9

33
I/O控制:按鍵、LED、蜂鳴器 Sub main() Do High 6 Pause 500 Low 6 High 9 Low 9
TSR 台灣超級機器人 I/O控制:按鍵、LED、蜂鳴器 Sub main() Do High 6 Pause 500 Low 6 High 9 Low 9 Loop End Sub 比較看看 有何不同 輸出高電位0.5秒給腳位6 Sub main() Do High 6 High 9 Pause 500 Low 6 Low 9 Loop End Sub 再試試這個 Dim X As Word Sub main() Do For X = 0 To 2000 Pulseout 6,X Pause 10 Next Loop End Sub 輸出低電位0.5秒給腳位6 輸出高電位0.5秒給腳位9 輸出低電位0.5秒給腳位9
 Do. High 6. Pause 500. Low 6. High 9. Low 9. Loop. End Sub. 比較看看. 有何不同. 輸出高電位0.5秒給腳位6. Sub main() Do. High 6. High 9. Pause 500. Low 6. Low 9. Loop. End Sub. 再試試這個. Dim X As Word. Sub main() Do. For X = 0 To Pulseout 6,X. Pause 10. Next. Loop. End Sub. 輸出低電位0.5秒給腳位6. 輸出高電位0.5秒給腳位9. 輸出低電位0.5秒給腳位9.")
34
I/O控制:直流馬達 TSR 台灣超級機器人 15是左輪、14是右輪 300是停止 數值越小正轉越快 數值越大逆轉越快 時間控制
Dim i As Word Sub main() Do For i = 0 To 50 Pulseout 14,100 Pause 16 Pulseout 15,100 Next Pulseout 14,320 Pulseout 15,500 Loop End Sub 15是左輪、14是右輪 300是停止 數值越小正轉越快 數值越大逆轉越快 高 速 直 進 100 快 向前轉 慢 300 慢 向後轉 快 500 時間控制 數值越大轉越久 右 後 轉 彎 體驗課程先有一點點概念就行 詳細內容將在正式研習中解說 任務研究: (一)直線加速 讓你的自走車走直線前進、低速、高速各1.5秒。 (二)醉漢走路 讓你的自走車反覆前進1秒後退0.5秒。 (三)”8”字型加速 讓你的自走車走”8”字型、低速2圈、高速2圈。
 Do. For i = 0 To 50. Pulseout 14,100. Pause 16. Pulseout 15,100. Next. Pulseout 14,320. Pulseout 15,500. Loop. End Sub. 15是左輪、14是右輪. 300是停止. 數值越小正轉越快. 數值越大逆轉越快. 高. 速. 直. 進. 100 快 向前轉 慢 300 慢 向後轉 快 500. 時間控制. 數值越大轉越久. 右. 後. 轉. 彎. 體驗課程先有一點點概念就行. 詳細內容將在正式研習中解說. 任務研究: (一)直線加速. 讓你的自走車走直線前進、低速、高速各1.5秒。 (二)醉漢走路. 讓你的自走車反覆前進1秒後退0.5秒。 (三) 8 字型加速. 讓你的自走車走 8 字型、低速2圈、高速2圈。")
35
TSR 台灣超級機器人 單板電腦系統 cmdBUS USB I/O

36
ServoRunnerA伺服機控制模組 與 機械手臂
TSR 台灣超級機器人 ServoRunnerA伺服機控制模組 與 機械手臂

37
Principles of RC Servo Control
TSR 台灣超級機器人 Principles of RC Servo Control

38
ServoRunnerA 伺服機控制模組 TSR 台灣超級機器人 本電路板與所轄伺服機的總電源輸入端, 必須接入6~12V之間的直流電源,
電流必須足以負載所有伺服機 伺服機連接端子,每組3 pin 共16組, 有方向性,請注意黑線或棕線接地 cmdBus接頭,有方向性, 與系統所有cmdBus並聯

39
SC16 Servo Control Board TSR 台灣超級機器人 8 - 11號 伺服機 12 -15號 伺服機 4 - 7號
0 - 3號 伺服機 結合了BASIC Commander (BC1)與一個Servo Runner A,使用者能大幅縮小模組所需要面積。
與一個Servo Runner A,使用者能大幅縮小模組所需要面積。")
40
機械手臂 各關節部位與作動方向 TSR 台灣超級機器人 零腰左右扭,一二肩雙抬, 三空且不語,四肘前後彎, 五腕上下勾,六指開合夾。
靈妖傳說 靈妖身型飄忽不定,常常左右扭動, 它只有一個耳朵,雙肩聳立, 住在山中空無一人,靈妖從不說話, 它行動與人類走路相似,卻前彎後彎, 從中午到晚上,全身上下會出現許多鉤子, 據說只要被六指靈妖夾住,必定無法逃脫…

41
單一伺服機的操控---腰扭(上) TSR 台灣超級機器人 使用二合一控制板(SC16)
此處仍須宣告伺服模組 但編號必須是0 Peripheral mySer As 0 Dim t,p As Integer Sub main() myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500, 0) mySer.SetPosTimeAndRun(2,1500, 0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500, 0) mySer.SetPosTimeAndRun(6,1800,0) Pause 3000 初始微調值 必須按照各人設備確實填入 先叫手臂乖乖站好 以免出現意外動作 此處暫不研究
 myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500, 0) mySer.SetPosTimeAndRun(2,1500, 0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500, 0) mySer.SetPosTimeAndRun(6,1800,0) Pause 初始微調值. 必須按照各人設備確實填入. 先叫手臂乖乖站好. 以免出現意外動作. 此處暫不研究.")
42
腰扭(下) TSR 台灣超級機器人 NO.0腰關節的POS值必須介於 800-2200之間 t = 1000 p = 1500 Do
mySer.SetPosTimeAndRun(0,2000,t) Pause p mySer.SetPosTimeAndRun(0,1000,t) mySer.SetPosTimeAndRun(0,1500,t) Loop End Sub 等待時間 p 不可小於動作時間 t 否則動作無法確實完成 新手操作時請將手臂基座前緣 切齊桌緣,以免手臂頂撞桌面
 Pause p. mySer.SetPosTimeAndRun(0,1000,t) mySer.SetPosTimeAndRun(0,1500,t) Loop. End Sub. 等待時間 p 不可小於動作時間 t. 否則動作無法確實完成. 新手操作時請將手臂基座前緣. 切齊桌緣,以免手臂頂撞桌面.")
43
指夾 TSR 台灣超級機器人 Peripheral mySer As ServoRunnerA @ 0 Dim t,p As Integer
Sub main() myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause 3000 t = 1000 p = 1500 Do mySer.SetPosTimeAndRun(6,1500,t) Pause p mySer.SetPosTimeAndRun(6,2000,t) mySer.SetPosTimeAndRun(6,1800,t) Loop End Sub NO.6指關節的POS值必須介於 之間 夾取物品時必須考慮物體厚度 相對提高POS值 例如 1550、1680 …
 myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause t = p = Do. mySer.SetPosTimeAndRun(6,1500,t) Pause p. mySer.SetPosTimeAndRun(6,2000,t) mySer.SetPosTimeAndRun(6,1800,t) Loop. End Sub. NO.6指關節的POS值必須介於 之間. 夾取物品時必須考慮物體厚度. 相對提高POS值. 例如 1550、1680 …")
44
三軸連動---肩肘腕 TSR 台灣超級機器人 肩關節POS值 t = 1000 NO.1 與 NO.2 伺服機必須同步 p = 1500
Peripheral mySer As 0 Dim t,p As Integer Sub main() myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause 3000 肩關節POS值 NO.1 與 NO.2 伺服機必須同步 t = 1000 p = 1500 mySer.SetPosTimeAndRun(1,1800, t) mySer.SetPosTimeAndRun(2,1800, t) Pause p mySer.SetPosTimeAndRun(4,1200, t) mySer.SetPosTimeAndRun(5,1800, t) End Sub 肘關節POS值 注意觀察機構擺動方向 腕關節POS值 任務 : 請調整肩肘腕POS值 使手臂末端恰好碰觸桌面
 myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause 肩關節POS值. NO.1 與 NO.2 伺服機必須同步. t = p = mySer.SetPosTimeAndRun(1,1800, t) mySer.SetPosTimeAndRun(2,1800, t) Pause p. mySer.SetPosTimeAndRun(4,1200, t) mySer.SetPosTimeAndRun(5,1800, t) End Sub. 肘關節POS值. 注意觀察機構擺動方向. 腕關節POS值. 任務 : 請調整肩肘腕POS值. 使手臂末端恰好碰觸桌面.")
45
TSR 台灣超級機器人 GWS RF 遙控器對組 發射器---廣營GWT-6A 接收機---廣營R-6NII

46
連接步驟 將接收器的電源(+)接到Servo Commander16的 Vcc上, 由Vcc提供5V電源給接收器。
TSR 台灣超級機器人 連接步驟 將接收器的電源(+)接到Servo Commander16的 Vcc上, 由Vcc提供5V電源給接收器。 (2) 將接收器的Vss(-)接到Servo Commander16的 GND上, 如此可以讓接收器與BC1(or BC2)共地。 (3) 將BC1(or BC2)的IO腳位 連接到接收器的相對應 的(1~6)訊號線上, 例如BC1的PIN1接到 接收器的第1動上。
接到Servo Commander16的 Vcc上, 由Vcc提供5V電源給接收器。 (2) 將接收器的Vss(-)接到Servo Commander16的 GND上, 如此可以讓接收器與BC1(or BC2)共地。 (3) 將BC1(or BC2)的IO腳位. 連接到接收器的相對應. 的(1~6)訊號線上, 例如BC1的PIN1接到. 接收器的第1動上。")
47
實習步驟 將USB連接到PC與ServoCommander16上。 2. 打開發射器電源,確定電源是亮綠燈,若否,請檢查電源。
TSR 台灣超級機器人 實習步驟 將USB連接到PC與ServoCommander16上。 2. 打開發射器電源,確定電源是亮綠燈,若否,請檢查電源。 3. 確認接收器與ServoCommander16有正確連接。 4. 執行innoBasic,並輸入下列程式,編譯後下載。 5. 推動各channel時,觀察終端視窗上S1~S6之值變化。

48
遙控器對組測試程式 TSR 台灣超級機器人 Dim S1, S2, S3, S4, S5, S6 As Word Sub Main ()
Do Pulsein(1,1,S1) Pulsein(2,1,S2) Pulsein(3,1,S3) Pulsein(4,1,S4) Pulsein(5,1,S5) Pulsein(6,1,S6) Debug “S1=”,S1,Cr, “S2=”,S2,Cr, “S3=”,S3,Cr, “S4=”,S4,Cr, _ “S5=”,S5,Cr, “S6=”,S6 Pause 500 Debug CLS Loop End Sub
 Pulsein(2,1,S2) Pulsein(3,1,S3) Pulsein(4,1,S4) Pulsein(5,1,S5) Pulsein(6,1,S6) Debug S1= ,S1,Cr, S2= ,S2,Cr, S3= ,S3,Cr, S4= ,S4,Cr, _. S5= ,S5,Cr, S6= ,S6. Pause 500. Debug CLS. Loop. End Sub.")
49
遙控機械手臂 目的 : 左桿往前拉時,則機械手臂末端恰好碰觸桌面 想法: 右桿_S1:右230305(300~310)370左
TSR 台灣超級機器人 遙控機械手臂 目的 : 左桿往前拉時,則機械手臂末端恰好碰觸桌面 想法: 右桿_S1:右230305(300~310)370左 右桿_S2:後230305(300~310)370前 左桿_S3:後230305(300~310)380前 左桿_S4:左230305(300~310)380右 VRA_S5:203(逆)、410(順) VRB_S6:203(逆)、410(順) 所以 < S3 < 390 代表左桿上拉到端點的大約值
370左. 右桿_S2:後230305(300~310)370前. 左桿_S3:後230305(300~310)380前. 左桿_S4:左230305(300~310)380右. VRA_S5:203(逆)、410(順) VRB_S6:203(逆)、410(順) 所以 370 < S3 < 390 代表左桿上拉到端點的大約值.")
50
遙控手臂參考程式 TSR 台灣超級機器人 t = 1000 p = 1500 這是大約值 Do 請以實際測試為準
Peripheral mySer As 0 Dim t,p,S3 As Integer Sub main() myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause 3000 t = 1000 p = 1500 Do Pulsein(3,1,S3) If S3 > 370 And S3 < 390 Then mySer.SetPosTimeAndRun(1,1800, t) mySer.SetPosTimeAndRun(2,1800, t) mySer.SetPosTimeAndRun(4,1200, t) mySer.SetPosTimeAndRun(5,1800, t) Pause p End IF Loop End Sub 這是大約值 請以實際測試為準
 myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause t = p = Do. Pulsein(3,1,S3) If S3 > 370 And S3 < 390 Then. mySer.SetPosTimeAndRun(1,1800, t) mySer.SetPosTimeAndRun(2,1800, t) mySer.SetPosTimeAndRun(4,1200, t) mySer.SetPosTimeAndRun(5,1800, t) Pause p. End IF. Loop. End Sub. 這是大約值. 請以實際測試為準.")
51
綜合應用---遙控夾娃娃機 目的 :就是遙控夾娃娃機啦 想法 : 右桿控制機械手臂左右扭動 左桿往前拉時,則機械手臂末端恰好碰觸桌面
TSR 台灣超級機器人 綜合應用---遙控夾娃娃機 目的 :就是遙控夾娃娃機啦 想法 : 右桿控制機械手臂左右扭動 左桿往前拉時,則機械手臂末端恰好碰觸桌面 左桿往後拉時,則機械手臂往上抬 左前方旋扭順轉到底,則機械手臂的爪夾緊 左前方旋扭置中,則機械手臂的爪半開 左前方旋扭逆轉到底,則機械手臂的爪張開

52
參考程式1(上) TSR 台灣超級機器人 Peripheral mySer As ServoRunnerA @ 0
Dim S1,S3,S6,Y As Integer Sub main() myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause 3000 Do Pulsein(1,1,S1) Pulsein(3,1,S3) Pulsein(6,1,S6) If S3 > 370 And S3 < 390 Then mySer.SetPosTimeAndRun(1,1800, 500) mySer.SetPosTimeAndRun(2,1800, 500) mySer.SetPosTimeAndRun(4,1200, 500) mySer.SetPosTimeAndRun(5,1800, 500) End IF If S3 > 220 And S3 < 240 Then mySer.SetPosTimeAndRun(1,1500, 500) mySer.SetPosTimeAndRun(2,1500, 500) mySer.SetPosTimeAndRun(4,1500, 500) mySer.SetPosTimeAndRun(5,1500, 500)
 myser.SetPosOffset(0,20) myser.SetPosOffset(1,-30) myser.SetPosOffset(2,-30) myser.SetPosOffset(4,-20) myser.SetPosOffset(5,-20) myser.SetPosOffset(6,30) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause Do. Pulsein(1,1,S1) Pulsein(3,1,S3) Pulsein(6,1,S6) If S3 > 370 And S3 < 390 Then. mySer.SetPosTimeAndRun(1,1800, 500) mySer.SetPosTimeAndRun(2,1800, 500) mySer.SetPosTimeAndRun(4,1200, 500) mySer.SetPosTimeAndRun(5,1800, 500) End IF. If S3 > 220 And S3 < 240 Then. mySer.SetPosTimeAndRun(1,1500, 500) mySer.SetPosTimeAndRun(2,1500, 500) mySer.SetPosTimeAndRun(4,1500, 500) mySer.SetPosTimeAndRun(5,1500, 500)")
53
參考程式1(下) TSR 台灣超級機器人 指關節夾緊,請依照所夾物體大小適度調大此數值 指關節半開,請依照所夾物體大小適度調大此數值
If S6 > 395 Then mySer.SetPosTimeAndRun(6,1550, 500) End IF If S6 > 205 And S6 < 350 Then mySer.SetPosTimeAndRun(6,1800, 500) If S6 < 210 Then mySer.SetPosTimeAndRun(6,2000, 500) Y= 10*S1-1500 mySer.SetPosTimeAndRun(0,Y, 500) Pause 500 Loop END SUB 指關節夾緊,請依照所夾物體大小適度調大此數值 指關節半開,請依照所夾物體大小適度調大此數值 指關節全開 將S2轉換成腰關節的Pos值 整個Do…Loop只有這裡等待0.5秒
 End IF. If S6 > 205 And S6 < 350 Then. mySer.SetPosTimeAndRun(6,1800, 500) If S6 < 210 Then. mySer.SetPosTimeAndRun(6,2000, 500) Y= 10*S mySer.SetPosTimeAndRun(0,Y, 500) Pause 500. Loop. END SUB. 指關節夾緊,請依照所夾物體大小適度調大此數值. 指關節半開,請依照所夾物體大小適度調大此數值. 指關節全開. 將S2轉換成腰關節的Pos值. 整個Do…Loop只有這裡等待0.5秒.")
54
動作群組的編輯 Motion Editor 動作編輯器控制程式的下載分為兩大步驟: (1) 先下載FRAME,
TSR 台灣超級機器人 動作群組的編輯 Motion Editor 動作編輯器控制程式的下載分為兩大步驟: (1) 先下載FRAME, (2) 然後下載innoBASIC程式 。 啟動動作編輯器前,請先確認 電腦與SC16與伺服機是否正確連接 請確認伺服機模組提供的電壓符合伺服機電壓範圍
 先下載FRAME, (2) 然後下載innoBASIC程式 。 啟動動作編輯器前,請先確認. 電腦與SC16與伺服機是否正確連接. 請確認伺服機模組提供的電壓符合伺服機電壓範圍.")
55
Steps to design Frames TSR 台灣超級機器人 (a) 打開動作編輯器 (b) 動作編號及角度
(c) 儲存檔案名稱 (.frm) 步驟(b)所設計的動作,需分別儲存至模組以便後續機器人開機後即可使用該frame;或儲存至電腦以便轉寄他人使用或後續維護。重覆此動作直至所有Frame皆設計完成。
 儲存檔案名稱 (.frm) 步驟(b)所設計的動作,需分別儲存至模組以便後續機器人開機後即可使用該frame;或儲存至電腦以便轉寄他人使用或後續維護。重覆此動作直至所有Frame皆設計完成。")
56
用innoBASIC程式呼叫執行已設計儲存的 Frames
TSR 台灣超級機器人 用innoBASIC程式呼叫執行已設計儲存的 Frames

57
TSR 台灣超級機器人 動作編輯實作

58
參考程式2(上) TSR 台灣超級機器人 t = 300 p = 300 Do
Peripheral mySer As 0 Dim t,p As Integer Dim i,j As Byte Sub main() myser.SetPosOffset(0,0) myser.SetPosOffset(1,-90) myser.SetPosOffset(2,-90) myser.SetPosOffset(4,40) myser.SetPosOffset(5,20) myser.SetPosOffset(6,-90) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause 3000 t = 300 p = 300 Do For j = 1 To 2 For i = 1 To mySer.LoadFrame(0) mySer.RunAllservo Pause p mySer.LoadFrame(i) mySer.RunAllservo Pause p Next i Next j
 myser.SetPosOffset(0,0) myser.SetPosOffset(1,-90) myser.SetPosOffset(2,-90) myser.SetPosOffset(4,40) myser.SetPosOffset(5,20) myser.SetPosOffset(6,-90) mySer.SetPosTimeAndRun(0,1500,0) mySer.SetPosTimeAndRun(1,1500,0) mySer.SetPosTimeAndRun(2,1500,0) mySer.SetPosTimeAndRun(4,1500,0) mySer.SetPosTimeAndRun(5,1500,0) mySer.SetPosTimeAndRun(6,1800,0) Pause t = 300 p = 300. Do. For j = 1 To 2 For i = 1 To 4 mySer.LoadFrame(0) mySer.RunAllservo Pause p mySer.LoadFrame(i) mySer.RunAllservo Pause p Next i Next j.")
59
參考程式2(下) TSR 台灣超級機器人 Next Pause p Pause p Loop End Sub
For i = 5 To mySer.LoadFrame(i) mySer.RunAllservo Pause p Next Pause p Pause p Loop End Sub
 mySer.RunAllservo Pause p. Next. Pause p Pause p. Loop. End Sub.")
60
終極任務---丟丟樂 目的 :遙控夾娃娃擲遠比賽 想法 : 用遙控器夾取娃娃 用遙控器命令手臂進入拋擲程式
TSR 台灣超級機器人 終極任務---丟丟樂 目的 :遙控夾娃娃擲遠比賽 想法 : 用遙控器夾取娃娃 用遙控器命令手臂進入拋擲程式 提示 : 用動作編輯器設計最佳Frame 用遙控器S5進入拋擲程式

61
TSR 台灣超級機器人 Thank You 進廣告

62
基礎教材: 機器人 實作應用 TSR_Bot 習作車 應用模組組合

Similar presentations















 李政澤(49937034) 曾群翔(49937057) 成員.>")
 Soochow University>")


.>")