Download presentation
Presentation is loading. Please wait.

1
§14-2 原动机及减速器的基本知识及其选择 一部机器主要由四大部分组成: 一、原动机的选定 1. 电动机及其类型
§14-2 原动机及减速器的基本知识及其选择 一部机器主要由四大部分组成: 原动机、传动机构、执行机构和控制系统。组成机器的四大部分必须选择和设计得当,才能保证整部机器的性能优良。 一、原动机的选定 1. 电动机及其类型 在电动机中有异步电动机、伺服电动机和步进电动机三大类。

2
异步电动机 交流异步电动机的机械特性曲线如图所示,它适应于启动时大扭距、低转速的要求。
异步电动机 转速(r/min):3000、1500、1000、750 额定功率(kW):0.75、1.1、1.5、2.2、3.0、4.0、5.5、7.5、11、18.5、22、30、37、45、55、75、90、110、132、160、200 效率(%):0.75~0.95 n O M 交流异步电动机的机械特性曲线如图所示,它适应于启动时大扭距、低转速的要求。
:3000、1500、1000、750. 额定功率(kW):0.75、1.1、1.5、2.2、3.0、4.0、5.5、7.5、11、18.5、22、30、37、45、55、75、90、110、132、160、200. 效率(%):0.75~0.95. n. O. M. 交流异步电动机的机械特性曲线如图所示,它适应于启动时大扭距、低转速的要求。")
3
直流电动机可用作电动机或发电机,还有其它特殊用途。它具有下列特点:
直流电动机 直流电动机可用作电动机或发电机,还有其它特殊用途。它具有下列特点: (1)优良的调速特性。调速平滑、方便、范围广,转速比可达1:200; (2)过载能力大。轧钢用直流电动机短时过转矩可达到额定转矩的2.5倍及以上,特殊要求的可以达到10倍,并能在低速下连续输出较大转矩。 (3)能承受频繁的冲击性负载。
优良的调速特性。调速平滑、方便、范围广,转速比可达1:200; (2)过载能力大。轧钢用直流电动机短时过转矩可达到额定转矩的2.5倍及以上,特殊要求的可以达到10倍,并能在低速下连续输出较大转矩。 (3)能承受频繁的冲击性负载。")
4
(4)可实现频繁的无级快速起动、制动和反转。
(5)能满足生产过程自动系统各种不同的特殊运行要求。 (6)缺点是直流电动机结构复杂,制造成本高,维护工作量大。 M n 直流电机额定电压(V): 24、60、110、220、330、440、550、560 效率(%):61~94 转速(r/min):400~3000
能满足生产过程自动系统各种不同的特殊运行要求。 (6)缺点是直流电动机结构复杂,制造成本高,维护工作量大。 M. n. 直流电机额定电压(V): 24、60、110、220、330、440、550、560. 效率(%):61~94. 转速(r/min):400~3000.")
5
伺服电动机的反馈环节是光电码盘来实现的。主要控制方式有位置反馈和速度反馈两种形式。
n 连续工作区 伺服电机 断续工作区 O M 在精密的机械设备中,如数控机床、机器人等均采用伺服电动机作为原动机,伺服电动机的机械特性曲线如图所示。其最大的优点为:在非连续工作区可以给出大的扭矩。 伺服电动机的反馈环节是光电码盘来实现的。主要控制方式有位置反馈和速度反馈两种形式。

6
伺 服 电 机 伺服电动机有直流伺服和交流伺服两种电动机。它的主要特点是无刷驱动,它的驱动是由一个专门的驱动器来完成,驱动器可以与其它控制器相联接(公控机或PLC等)。交流伺服技术近几年得到快速发展,它将成为今后伺服电机的主流产品。
。交流伺服技术近几年得到快速发展,它将成为今后伺服电机的主流产品。 .")
7
步进电机 步进电机可以根据脉冲的个数和频率输出转角和转速,它主要用在精度不高,工作阻力不大的开环控制中。步进电机有三相和五相输入形式,输入频率一般小于10K,步距角一般有0.75度,一般运用转速较低。

8
2. 液压动力源 液压缸是实现直线运动的基本动力原件。 直线运动液压缸的类型有:单作用液压缸、双作用液压缸、组合式液压缸。
2. 液压动力源 液压缸是实现直线运动的基本动力原件。 直线运动液压缸的类型有:单作用液压缸、双作用液压缸、组合式液压缸。 摆动液压缸有:单片式、双片式等形式。 液压缸气缸缸筒内径尺寸系列 8 10 12 16 20 25 32 40 50 63 80 (90) 100 (110) 125 (140) 160 (180) 200 (220) 250 320 400 500 630 液压缸长度系列:25~4000 大于4000时,按R10系数选用。
 100. (110) 125. (140) 160. (180) 200. (220) 液压缸长度系列:25~4000. 大于4000时,按R10系数选用。")
9
3. 气动动力源 气动系统已成为实用的工业设备,未来的发展前途更是无可限量,作为动力源气缸是最常用的气动原件。气动和液动的区别:液压系统输入功率大,在环境污染和泄露严重,气压系统无污染,动作快,但承受的载荷较小。

10
综上可以看出,电机应用场合非常广泛,布置方便、结构紧凑,液压系统用于大功率驱动较多,但管路繁杂,需要液压泵站等;气动系统一般用于小功率场合,动作速度快,但控制较难,也需要气源。在考虑总体方案时,液压和气动一定要考虑周围环境是否有液或气源,否则系统造价高。

11
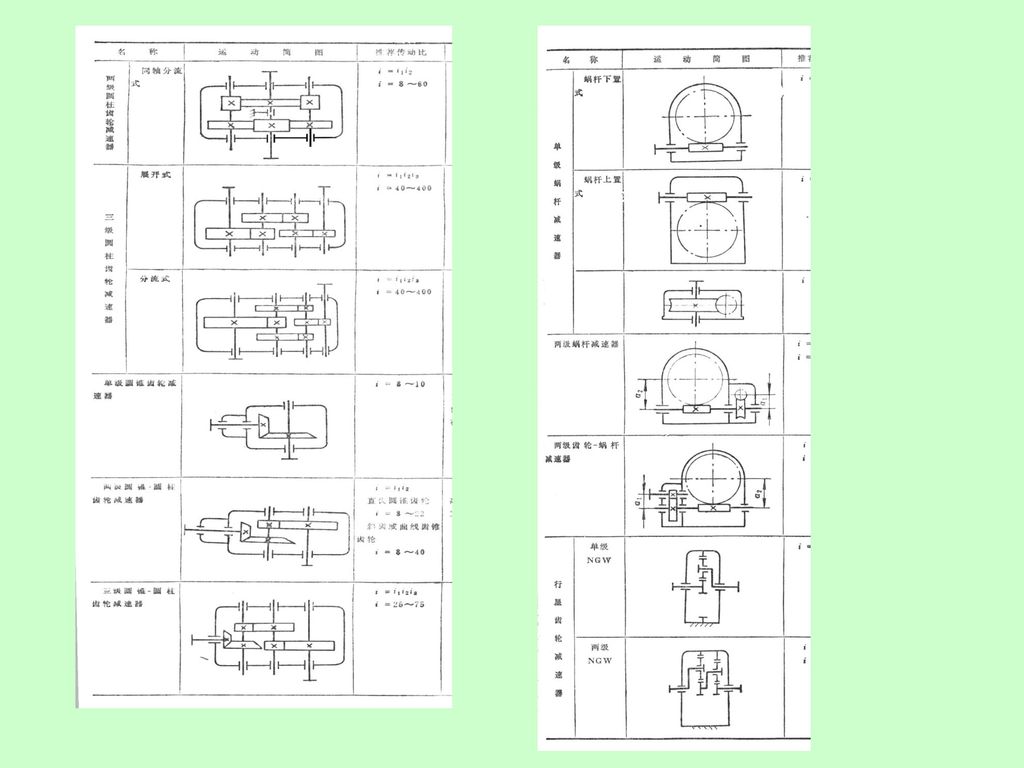
二、减速器(变速)系统 减速器是机械传动方案中一个重要部分,它的作用是变换运动,增加扭矩,减速器有各种类型,参见下列图表。
系统 减速器是机械传动方案中一个重要部分,它的作用是变换运动,增加扭矩,减速器有各种类型,参见下列图表。")
12
减速器类型及用途

14
减速器与电机的关系 1. 确定传递功率 2. 确定传动比 3. 确定电机和减速器的类型 4. 要校验扭矩、起动特性等等
减速器与电机的关系 1. 确定传递功率 这要根据工作阻力及机械系统的效率确定。 2. 确定传动比 3. 确定电机和减速器的类型 4. 要校验扭矩、起动特性等等 5. 在一些特殊的情况要计算重量、空间尺寸等

15
§14-3 机械运动方案设计 原动机运动一般有均匀速运动、直线往复两种主要形式。机构设计一般常将原动件运动转变成如下的各种运动要求。(见有关参考书)
")
16
任何构件从运动学来讲它最多有六个自由度,对执行构件的要求一般只能少于或等于六自由度的运动要求。
总之,具体的工作要求需要根据具体问题决定。本篇介绍一些科研和工作实践中一些实用机构设计例。重点不是介绍具体的机构设计知识,而是通过这些设计介绍如何应用机构和如何进行创新。 1. 传动机构的类型及功用 传动机构主要用于将原动机的运动和动力传动给执行机构(构件),使其完成特定的作业要求。常用的机构有:齿轮机构、螺旋机构、带传动与链传动、联杆机构、凸轮机构等。
,使其完成特定的作业要求。常用的机构有:齿轮机构、螺旋机构、带传动与链传动、联杆机构、凸轮机构等。")
17
几种常用传动机构的基本特性 齿轮机构 蜗杆—蜗轮机构 带传动 链传动 连杆机构 凸轮机构 螺旋机构 优 点 传动比准确,外廓尺寸
小,交率高,寿命长,功 率及速度范围广,适宜于 短距离传动 传动比大 , 可实现 反向自锁 用于空 间交错轴传动 传 动平稳 中心距变化范围 广 可用于长距离 传动 可吸振 能 起到缓冲及过载 保护作用 平均传动比 准确 特殊链可用 于传送物料 适用于宽广的载 菏范围 可实现不 同的运动轨迹 可 用于急回 增力 加 大或缩小行程等 能实现各种运 动规律 机构 紧凑 可改变运动形 式 : 转动变移 动 传力比较大 缺 制造精度要求高 效率较低 有打滑现象 轴 上受力较大 有振动冲击 有多 边形效应 设计复杂 不宜高 速运动 易磨损 主要 用于运动传递 滑动螺旋刚度 较差 效率不高 效 率 开式 0.92~0.96 闭式 0.9 6 ~0.99 0.5~0.7 0.7~0.9 自锁 0.4~0.45 平皮带 0.92~0.98 三角带 0.92~0.94 同步齿形带 0.96~0.98 0.9~0.93 0.95~0.97 在运动过程中效 率随时发生变化 随运动位置和 压力角不同 效率亦不同 滑动 0.3~0.6 滚动 0.85~0.98 速 度 级精度直齿 v ≤ 18 m/s 级精度非直齿 36 5 200m/s 圆弧齿轮 100m/s 滑动速度 15~35m/s 三角带≤ 25 k W 同步齿形带≤ 50m/s 滚子链≤ 15 齿形链≤ 30 功 渐开线齿轮≤ 50000 kW 圆弧齿轮≤ 6000 锥齿轮≤ 1000 小于 750 常用为 50 以 下 40 200~750 最大可达 3500 通常为 100kW 比 一对圆柱齿轮 i 10 通常 一对圆锥齿轮 8 3 100 常用 15~60 60 10~40 7 滚子链 7~10 齿形链 其 他 主要用于传动 常用于传动链的 高速端 常用于传动链中 速度较低处 既可做为传动机 构又可做为执行 主要用于执行 主要用于转变 运动形式 可做 为调整机构

18
2. 基本机构的组合 基本机构的组合大致可分为三种形式。 (1)串接式
主动件1的运动 (t)依次通过基本机构I和II,使从动件2获得某一运动规律(t),在这种组合机构中前一机构的从动件往往又是后一机构的主动件。 (2)并联式 主动件1的运动(t)同时传给基本机构I和II,使它们具有相同的运动规律 1(t)或不相同的运动规律 1(t)和 2(t),并通过具有两个自由度的差劝机构III使从动件2获得合成的运动规律(t) 。 III使运动叠加后,传给从动件2,其运动规律为(t) 。
依次通过基本机构I和II,使从动件2获得某一运动规律(t),在这种组合机构中前一机构的从动件往往又是后一机构的主动件。 (2)并联式. 主动件1的运动(t)同时传给基本机构I和II,使它们具有相同的运动规律 1(t)或不相同的运动规律 1(t)和 2(t),并通过具有两个自由度的差劝机构III使从动件2获得合成的运动规律(t) 。 III使运动叠加后,传给从动件2,其运动规律为(t) 。")
19
(3)组合式 组成复合式组合机构时,基本机构有机联结,互相依存。基本机构I或II中主动件的运动(t),通过机构I、II中部分构件组成的差动机构III使运动叠加后,传给从动件2,其运动规律为(t) 。
组合式 组成复合式组合机构时,基本机构有机联结,互相依存。基本机构I或II中主动件的运动(t),通过机构I、II中部分构件组成的差动机构III使运动叠加后,传给从动件2,其运动规律为(t) 。")
20
3. 执行机构的运动协调及运动循环图 传动机构主要用于将原动机的运动和动力传动给执行机构(构件),使其完成特定的作业要求。常用的机构有:齿轮机构、螺旋机构、带传动与链传动、联杆机构、凸轮机构等。
,使其完成特定的作业要求。常用的机构有:齿轮机构、螺旋机构、带传动与链传动、联杆机构、凸轮机构等。")
21
多数机器不只有一个执行构件,往往是许多执行构件执行同一个任务,实际上是一部机器中的不同执行构件在完成同一任务时对速度的协调。以牛头刨为例,它有三个基本运动即垂直进给运动、切削运动、横向进给运动。
为了规划这些运动,进行时序的调节,可以用机械运动循环图来表示。所谓运动循环图就是标明机械在运动循环中各执行构件间的运动配合与时序的关系图。运动循环图有三种循环方式:直线式、圆周式及直角坐标式。

22
直线式运动循环图:动作时序清晰明了 圆周式运动循环图:各执行构件的运动以机械原动件的相位关系清楚 直角坐标式运动循环图:是用直角坐标的位移线图表示其运动时序,将其工作行程、空行程及停歇区段分别以上升、下降及水平线表示。

24
4. 运动方案注意问题 1)传动链应尽可能短 (1)中间传动环节过于复杂,一部电动机带动多条传动链;(2)动力源安装位置距执行机构过远;(3)变换运动形式及转动方向的环节太多等等。过长的传动链会引起传动精度和传动效率的降低,增加成本,或使故障率增加。 2)机械效率应尽可能高 有些机构传动效率较低,在设计过程中一定要认真加以考虑。在有些工作位置也可能出现自锁现象,致使机器不能正常工作。 3)传动比分配应尽可能合理 传动比的分配要注意一级传动时最大传动比的限制,各级传动比的分配原则应当是从电机的执行机构一般由小到大,使高速端承受低扭矩,结构合理、机构紧凑。 4)传动机构的顺序安排 带传动不易传递大扭矩,多安排在高速端,凸轮机构一般用于传动系统的末端。
机械效率应尽可能高. 有些机构传动效率较低,在设计过程中一定要认真加以考虑。在有些工作位置也可能出现自锁现象,致使机器不能正常工作。 3)传动比分配应尽可能合理. 传动比的分配要注意一级传动时最大传动比的限制,各级传动比的分配原则应当是从电机的执行机构一般由小到大,使高速端承受低扭矩,结构合理、机构紧凑。 4)传动机构的顺序安排. 带传动不易传递大扭矩,多安排在高速端,凸轮机构一般用于传动系统的末端。")
Similar presentations

: 写出 5 的倍数( 6 个) 2 , 4 , 6 , 8 , 10 , 12 , 14 , 16 , 18 , 20 5 , 10 , 15 , 20 , 25 , 30.>")








。试求当t=0和t=2s时,荡木中点M的速度和加速度。>")



>")


教材配套电子教案>")


辅助动力源,短时大量供油 特点: 采用蓄能器辅助供油,可以减小泵的流量,电机的功率,降低系统的温升。>")