Download presentation
Presentation is loading. Please wait.

2
第二讲

3
第 二章 基于偶然误差的 解析摄影测量平差的若干扩展 §2-1 空中三角测量的发展历程 §2-2 摄影测量与非摄影测量观测值的 联合平差 §2-3 GPS 辅助空中三角测量 §2-4 方差 - 协方差分量估计及其 在航测中的应用

4
§2-1 空中三角测量的发展历程 X Z Y SS 高程控制点 平高控制点 待定点

5
n n 航带法 解求航线的非线性 改正参数 n n 独立模型法 解求模型的相似变 换参数 n n 光束法 解求像片的外方位 元素及物点坐标 n n 航带法 解求航线的非线性 改正参数 n n 独立模型法 解求模型的相似变 换参数 n n 光束法 解求像片的外方位 元素及物点坐标 传统空三加密的三种方法传统空三加密的三种方法 像片坐标 初步航带平差 计算 / 量测航线 区域网平差 计算 / 量测独立模型 相对定向 航线构成 光束法 独立模型法 航带法

6
n n 以一幅影像所组成的一束光线作为平差的基本 单元,以中心投影的共线方程作为平差的基础 方程,通过各个光线束在空间的旋转和平移使 同名光线实现最佳的交会,并使整个区域最佳 地纳入到地面控制点坐标系统中,从而求得像 片的定向参数及加密点的地面坐标。 光束法区域网平差

7
中心投影共线方程 航摄仪投影中心 S M Z Y X x y z x y

8
共线方程之误差方程

9
光束法区域网平差法方程系数阵光束法区域网平差法方程系数阵 × 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 A B C D E F G H I J K L M N O 1 , 2 , … , 20 待定点名 A , B , … , O 像片名 平高地面控制点 × × × × × × × × ×× × × × × × A B C D E F G H I J K L M N O c 加密点坐标未知数像片外方位元素未知数附加参数 1 3 5 7 9 11 13 15 17 19 转 置 对 项 称

10
n n 将原始的大地测量观测值、一般的控制信息和 / 或相对控制条件与摄影测量观测值一起进行联 合平差 §2-2 摄影测量与非摄影测量 观测值的联合平差 大地测量观测值 距离 角度 天文经纬度 局部坐标 大地测量观测值 距离 角度 天文经纬度 局部坐标 像片外方位元素 高差仪记录 摄站坐标 像片姿态 摄站间坐标差 相对控制条件 湖面等高 平面 圆周 共线 相对控制条件 湖面等高 平面 圆周 共线

11
非摄影测量观测值误差方程 共线条件误差方程 像片未知数坐标未知数

12
空间距离观测值误差方程的建立 误差方程 空间距离 误差方程矩阵形式 i (X i,Y i,Z i ) j (X j,Y j,Z j )
 j (X j,Y j,Z j )")
13
联合平差中法方程的构建和求解 误差方程矩阵形式 法方程解的矩阵形式

14
联合平差法方程系数阵联合平差法方程系数阵 3×21 片光束法区域网加入 16 个距离观测值后的法方程系数阵结构图

15
联合平差中法方程的构建和求解 带有条件的间接平差误差方程矩阵形式 法方程解的矩阵形式 k 为联系数=条件式个数

16
联合平差法方程系数阵联合平差法方程系数阵 3×21 片光束法区域网加入 16 个距离观测值后的法方程系数阵结构图 边框宽度为 16

17
n n 利用安装于飞机上与航摄仪相连接的和设在地面一个 或多个基准站上的至少两台 GPS 信号接收机同步而连 续地观测 GPS 卫星信号、同时获取航空摄影瞬间航摄 仪快门开启脉冲,经过 GPS 载波相位测量差分定位技 术的离线数据后处理获取航摄仪曝光时刻摄站的三维 坐标,然后将其视为附加观测值引入摄影测量区域网 平差中,以取代地面控制,经采用统一的数学模型和 算法来整体确定目标点位和像片方位元素,并对其质 量进行评定的理论、技术和方法 目的是极大地减少甚至完全免除常规空中三角测量所 必需的地面控制点,以节省野外控制测量工作量、缩 短航测成图周期、降低生产成本、提高生产效率 §2-3 GPS 辅助空中三角测量

18
单差分方式相对动态 GPS 定位示意图 带 GPS 的航空摄影

19
GPS 航空摄影系统的空间偏移 Y Z X

20
投影中心与 GPS 天线相位中心之几何关系 A 机载 GPS 天线相位中心 航摄仪投影中心 S M Z Y X u v w x y

21
GPS 摄站坐标误差方程 顾及动态 GPS 定位之系统误差 线性化之误差方程

22
GPS 辅助光束法误差方程 将 GPS 摄站坐标视为带权观测值引入自检校光 束法平差所得到的一个基础方程

23
GPS 辅助光束法法方程 与常规光束法比较,法方程系数阵边宽加大了, 但其 良好的稀疏带状结构并没有破坏

24
GPS 辅助光束法区域网平差法方程系数阵 A B C D E F G H I J K L M N O c r d 加密点坐标未知数像片外方位元素未知数附加参数 1 3 5 7 9 11 13 15 17 19 转 置 对 项 称 × 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 A B C D E F G H I J K L M N O 1 , 2 , … , 20 待定点名 A , B , … , O 像片名 平高地面控制点 × × × × × × × × ×× × × × × ×

25
DGPS/IMU 辅助光束法平差系统 WuCAPS (Wuhan Combined Bundle Adjustment for DGPS/IMU data and photogrammetric observations) 用于摄影测量与遥感高精度点位测定软件包 以共线条件方程为出发点,容当代的基于统计 理论的误差随机模型和理论上最为严密的自检 校光束法区域网平差函数模型于一体,发展了 自己的一整套算法并予以实现 自 1985 年开始研制,至今已完成了 MS-DOS 和 Windows 两个版本 目前,该系统正在测绘生产单位、科研部门和 学校教学实践中广泛使用
 用于摄影测量与遥感高精度点位测定软件包 以共线条件方程为出发点,容当代的基于统计 理论的误差随机模型和理论上最为严密的自检 校光束法区域网平差函数模型于一体,发展了 自己的一整套算法并予以实现 自 1985 年开始研制,至今已完成了 MS-DOS 和 Windows 两个版本 目前,该系统正在测绘生产单位、科研部门和 学校教学实践中广泛使用")
26
WuCAPS 界面

27
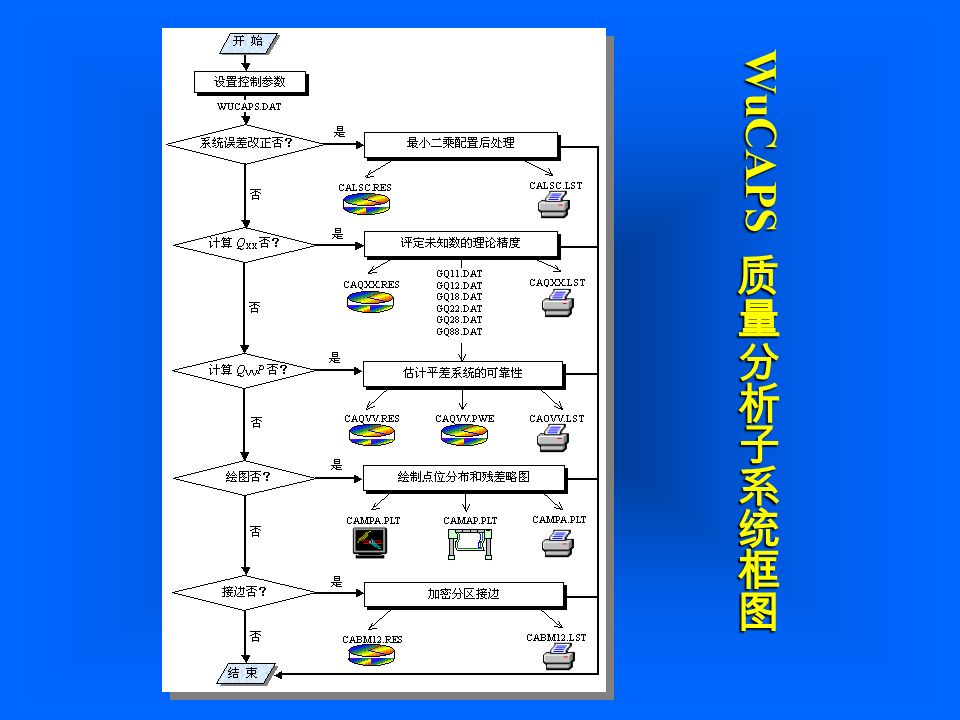
WuCAPS 功能模块

28
WuCAPS 主要功能 可用于航带法区域网平差 可用于带可选附加参数的自检校光束法区域网平差 可进行地面测量数据与摄影测量观测值的联合平差 GPS 辅助光束法区域网平差 POS 辅助光束法区域网平差 可自动剔除观测值的粗差 可补偿观测值的系统误差 可评价各种未知数的理论精度 可估计各类观测值的验后方差 可绘制测区像片覆盖图 可绘制测区点位分布图和已知点残差图 可实现加密分区的半自动接边

31
中国 GPS 空三试验区分布图 承德 (1998) 面积 :81000km 2 黑龙江 (1996~1998) 面积 :17600km 2 北京 (1996~1998) 面积 :205km 2 天津 (1995) 面积 :1100km 2 太原 (1994) 面积 :10km 2 中越边界 (1996~1998) 面积 :10700km 2 海南岛 (1996~1998) 面积 :30000km 2 总面积: 364000 km 2 加密区: 150000 km 2 新疆 (2002~2004) 面积 :142000km 2 酒泉 (2004) 面积 :32000km 2 秦岭 (2004) 面积 :24000km 2 敦煌 (2004) 面积 :25000km 2
 面积 :81000km 2 黑龙江 (1996~1998) 面积 :17600km 2 北京 (1996~1998) 面积 :205km 2 天津 (1995) 面积 :1100km 2 太原 (1994) 面积 :10km 2 中越边界 (1996~1998) 面积 :10700km 2 海南岛 (1996~1998) 面积 :30000km 2 总面积: km 2 加密区: km 2 新疆 (2002~2004) 面积 :142000km 2 酒泉 (2004) 面积 :32000km 2 秦岭 (2004) 面积 :24000km 2 敦煌 (2004) 面积 :25000km 2")
32
天津试验 ( 1995 年航空摄影, 航摄比例尺 1:35000, 山区地 )
")
33
天津试验结果 ( 1995 年航空摄影, 航摄比例尺 1:35000, 山区地形 ) n n 1024 胶片, RC-30(152 mm ) ,区域为 7×20 , Trimble 4000 , 1s 数据更新率 四角布标 ( 常规光束法平差须布设个 25 平高点和个 8 高程点 ) n n 对于 1:10000 航测成图,检查点不符值: 平面 <4.0m ,高程 <2.0m
 n n 1024 胶片, RC-30(152 mm ) ,区域为 7×20 , Trimble 4000 , 1s 数据更新率 四角布标 ( 常规光束法平差须布设个 25 平高点和个 8 高程点 ) n n 对于 1:10000 航测成图,检查点不符值: 平面 <4.0m ,高程 <2.0m")
34
GPS 辅助空中三角测量 X Z Y SS 待定点 高程控制点 平高控制点

35
再 见

Similar presentations










班 毕业时间:2012年6月.>")









》 2.1 比零小的数 龙都初级中学 彭生翔>")