Download presentation
Presentation is loading. Please wait.

1
第5章 高频振荡器 5.1 概述 5.2 反馈振荡器 5.3 振荡器的分析方法 5.4 互感耦合振荡器 5.5 三点式振荡器
5.1 概述 5.2 反馈振荡器 5.3 振荡器的分析方法 5.4 互感耦合振荡器 5.5 三点式振荡器 5.6 振荡器频率稳定度 5.7 石英晶体振荡器 5.8 振荡器中的几种现象 5.9 RC振荡器 5.10 负阻振荡器

2
5.1 概 述 振荡器——就是自动地将直流能量转换为具有一定波形 参数的交流振荡信号的装置。和放大器一样也是能量转换
5.1 概 述 振荡器——就是自动地将直流能量转换为具有一定波形 参数的交流振荡信号的装置。和放大器一样也是能量转换 器。它与放大器的区别在于,不需要外加信号的激励,其输 出信号的频率,幅度和波形仅仅由电路本身的参数决定。 低频正弦振荡器 高频正弦振荡器 微波振荡器 正弦振荡 振荡器 分类 矩形波振荡器 三角波振荡器 锯齿波振荡器 非正弦波振荡器

3
应用范围:在发射机、接收机、测量仪器(信号发生
器)、计算机、医疗、仪器乃至电子手表等许多方面振荡器 都有着广泛的应用。 主要技术指标: 1.振荡频率f及频率范围: 2.频率稳定度:调频广播和电视发射机要求:10-5~10-7左右 标准信号源:10-6~10-12 要实现与火星通讯:10-11 要为金星定位:10-12 3.振荡的幅度和稳定度:
、计算机、医疗、仪器乃至电子手表等许多方面振荡器. 都有着广泛的应用。 主要技术指标: 1.振荡频率f及频率范围: 2.频率稳定度:调频广播和电视发射机要求:10-5~10-7左右. 标准信号源:10-6~ 要实现与火星通讯: 要为金星定位: 振荡的幅度和稳定度:")
4
4.频谱(残波辐射): 讨论内容:从振荡原理入手研究振荡器判据、寻求振荡 条件的分析方法,讨论各种振荡电路,基本线索是振荡器的 频率稳定度。
: 讨论内容:从振荡原理入手研究振荡器判据、寻求振荡 条件的分析方法,讨论各种振荡电路,基本线索是振荡器的 频率稳定度。")
5
5.2 反馈振荡器 右图是反馈放大器的方框图,由该图知: 5.2.1 当放大器接成负反馈时,5.2.1式中取正号,当
5.2 反馈振荡器 右图是反馈放大器的方框图,由该图知: 反馈放大器方框图 5.2.1 当放大器接成负反馈时,5.2.1式中取正号,当 负反馈变成自激振荡器。其 振幅条件为

6
相位条件为 而振荡器往往直接引入的正反馈,如 上图 (+)号所示。 此时式5.2.1式变为 5.2.2 当其 时,就会产生自激振荡。其 振幅条件为: 相位条件为: ,当达 要使振荡器能够起振,在刚接通电源后, 到平衡时, 。这就是振荡器振幅平衡条件。

7
5.3 振荡器的分析方法 分析振荡器有两种方法:即瞬态分析法和稳态分析法。 这里只介绍稳态分析法。
5.3 振荡器的分析方法 分析振荡器有两种方法:即瞬态分析法和稳态分析法。 这里只介绍稳态分析法。 稳态分析方法考虑问题的基础是:振荡器在起振时是小 信号,属于线性电路。因此,可按线性电路的分析方法来初 理。而振荡器在平衡时虽属大信号非线性电路,但是对基波 而言则属准线性电路,当引入平均参数后,即可按线性电路 来近似处理,使问题的分析得到简化。所以稳态分析法是适 应在线性理论基础之上的。由前面分析可知,正反馈是产生 自激振荡的必要条件。 而正反馈只是反馈放大器的特殊形

8
式,我们试图将振荡器与反馈放大器联系起来,如图所示。
根据反馈理论,整个反馈放大器的“闭环增益”Af(s)为 5.3.1 其中 为放大器的电压增益 为反馈网络的反馈系数
为 其中. 为放大器的电压增益. 为反馈网络的反馈系数.")
9
为开环电压增益(环路增益) 为反馈放大器的特征多项式 由(5.3.1)式可知,若令Us(s)=0,则Af(s)趋于无穷, 就是说 没有输入信号激励的情况下,就能自动地将直流能量转换为交 流能量。因此,我们说振荡器是反馈放大器的特殊形式。这 是稳态分析方法的基本依据。 欲满足振荡条件就必须 5.3.2 这就是反馈放大器的特征方程。解此方程就可得振荡频 率、振幅平衡条件和起振条件。

10
5.4 互感耦合振荡器 互感耦合振荡器 石英晶体振荡器 振荡器分类 三 点 式 振 荡 器 基本型 电感反馈振荡器 克拉泼振荡器
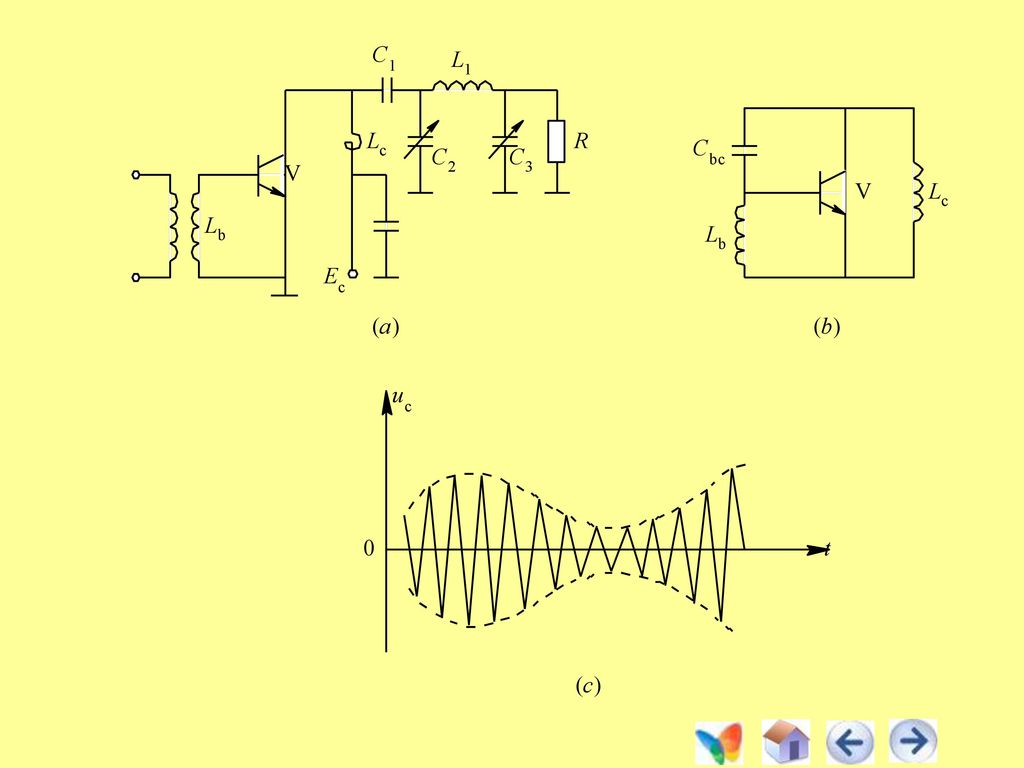
5.4 互感耦合振荡器 互感耦合振荡器 石英晶体振荡器 三 点 式 振 荡 器 振荡器分类 电感反馈振荡器 电容反馈振荡器 基本型 克拉泼振荡器 西勒振荡器 单管互感耦合振荡器 互感耦合振荡器(或变压器反馈振荡器)又称为调谐型振 荡器,根据回路(选频网络)的三极管不同电极的连接点又可 分为集电极调谐型、发射极调谐型和基极调谐型。如图5.4-1 所示。这里我们只讨论集电极调谐型,而集电极调谐型又可
又称为调谐型振. 荡器,根据回路(选频网络)的三极管不同电极的连接点又可. 分为集电极调谐型、发射极调谐型和基极调谐型。如图 所示。这里我们只讨论集电极调谐型,而集电极调谐型又可.")
11
分为共射和共基两种类型,均得到广泛应用。两者相比,共 基电路的功率增益较小,输入阻抗较低,所以难于起振,但
截止频率较高。此外,共基电路内部反馈比较小,工作比较 稳定。 三种互感耦合振荡器

12
以上三种电路,变压器的同名端如图所示。它必须满足
振荡的相位条件,在此基础上适当调节反馈量M以满足振荡 的振幅条件。下面利用“切环注入法”判断电路是否满足相 位条件。 (1)在电路中某一个合适的位置(往往是放大器的输入端)把电路断开,(用X号表示); (2)在断开出的一侧(往往是放大器的输入端)对地引入 一个外加电压源 ,该电压源的频率从低到高覆盖回路的谐 振频率; (3)看经过放大器反馈网络之后转回到断开处另一侧对
在电路中某一个合适的位置(往往是放大器的输入端)把电路断开,(用X号表示); (2)在断开出的一侧(往往是放大器的输入端)对地引入. 一个外加电压源 ,该电压源的频率从低到高覆盖回路的谐. 振频率; (3)看经过放大器反馈网络之后转回到断开处另一侧对.")
13
地的电压 是否与 同相,为同相则其中必有某一个频率满
足自激振荡的相位条件(注意这里是实际方向),电路有振荡 的可能。 如果电路又同时满足振幅条件就可以产生正弦振荡了。 下面分析集电极调谐型反馈振荡器的振荡条件。 设工作频率远小于振荡器的特征频率,忽略其内部反馈 的影响,用平均参数画出了图(a)的大信号等效电路,如图 所示。它与变压器耦合放大器区别在于次级负载就是放大器 输入端的Gie。其 为
,电路有振荡. 的可能。 如果电路又同时满足振幅条件就可以产生正弦振荡了。 下面分析集电极调谐型反馈振荡器的振荡条件。 设工作频率远小于振荡器的特征频率,忽略其内部反馈. 的影响,用平均参数画出了图(a)的大信号等效电路,如图. 所示。它与变压器耦合放大器区别在于次级负载就是放大器. 输入端的Gie。其 为.")
14
互感耦合振荡器大信号等效电路 故 5.4.1 式中 其中

15
而 5.4.2 根据起振条件 ,即 5.4.3 可得 5.4.4 (虚部为零) 即 5.4.5 (实部为零)
 即 (实部为零)")
16
(振荡频率) 解上述方程组得 5.4.6 (起振条件) 起振时,应用微变参数代替平均参数,因此互感耦合振 荡器的起振条件是: 5.4.7 上式说明,回路的损耗越大(r大),耦合越弱(M越小),电路起振所需要的跨导gm就越大。当M=0时,起振需要的跨导gm为无穷大。这表明电路已不再是振荡器了。
,耦合越弱(M越小),电路起振所需要的跨导gm就越大。当M=0时,起振需要的跨导gm为无穷大。这表明电路已不再是振荡器了。")
17
由式5.4.6还可以看出,振荡器的频率和晶体管的参数有
关。(G∑=Goe+ρ2Gie)实际上,管子的极间电容对高频振荡 频率影响较大,这一点是不希望的。因为这些参数与温度有 关。
实际上,管子的极间电容对高频振荡. 频率影响较大,这一点是不希望的。因为这些参数与温度有. 关。")
18
差分对管互感耦合振荡器 如图所示。两差分对管的集电极分别接有由L1、C1、R1和L2、C2、R2组成并联谐振回路。反馈电压 和输出电压 分别由两管的集电极取出。振荡器的闭环回路由BG1 差分振荡器

19
的集电极经互感线圈耦合到BG2的基极,然后通过共发耦合
电路回到BG1的集电极。图中A与D同相,环路满足正反馈特性。 再调节互感M使之满足振幅平衡条件,电路便可进入振荡状 态。 与单管振荡器比较,差分对管振荡器更为优越: 1.输出回路不在反馈环路内,只要BG2不工作在饱和区内,负 载与环路就处于隔离状态,振荡器的频率稳定度和幅度稳定 度都会有所提高; 2.输出不含有偶次谐波,且奇次谐波成分比较小,故失真大 为减小。

20
5.5 三点式振荡器 什么叫三点式振荡器? 所谓三点式振荡器就是对于交流 等效电路而言,由LC回路引出三个端点分别与晶体管三个电
极相连的振荡器。 依靠电容产生反馈电压构成的振荡器则称为电容三点式 振荡器,又称考毕兹振荡器。 依靠电感产生反馈电压构成的振荡器则称为电感三点式 振荡器,又称哈特莱振荡器。 构成三点式的基点是如何取出满足相位条件的正反馈电 压。

21
5.5.1 构成三点式振荡器的原则(相位判据) 假设: (1)不计晶体管的电抗效应; (2)LC回路由纯电元件组成,即
为满足相位条件,回路引出的三个端点应如何与晶体管的三 个电极相连接? 如图所示,振荡器的振荡频率十分接近回路的谐振 频率,(谐振回路谐振时呈现纯电阻性),于是有 5.5.1 5.5.2 即 5.5.3
,于是有 即")
22
三点式振荡器的相位判据

23
∵放大器已经倒相,即 与 差180°,所以要求反馈电
压 必须与 反相才能满足相位条件。 5.5.4 因此,Xbe必须与Xce同性质,才能保证 与 反相。 由5.5.3和5.5.4式,归结起来,Xbe和Xce性质相同;Xcb 和Xce、Xbe性质相反。这就是三点式振荡器的相位判据。也 可以这样来记忆,与发射极相连接的两个电抗性质相同,另 一个电抗则性质相反。

24
5.5.2 电容三点式振荡器——考毕兹振荡器 图所示电路是电容三点式的典型电路。LC回路的三个端点分别与三个电极相连,且Xce和Xbe为容抗,Xcb为感抗。故属电容反馈三点式振荡器,又称考毕兹振荡器。 电容三点式振荡器

25
其中ZL为高频扼流圈,防止高频交流接地。Rb1、Rb2、 Re为偏置电阻。下面分析该电路的振荡条件,图 (a)画了交
流等效电路。(b)为Y参数等效电路。 电容三点式振荡器的等效电路
为Y参数等效电路。 电容三点式振荡器的等效电路.")
26
容易判断振荡器属并-并联接,电压取样电流求和的反
馈放大器。设其信号源电流为 ,负载电流为 ,显然 5.5.5 式中,yi——网络aa′-bb′的大信号输入导纳; yr——网络aa′-bb′的大信号反向传输导纳; yf——网络aa′-bb′的大信号正向传输导纳; yo——网络aa′-bb′的大信号输出导纳。 实际上, 只不过是虚构的。因为振荡器工作时无须外加信号激励电流,即 由于未接负载,故 , 而 。意味着式5.5.5是线性齐次方程。即

27
5.5.6 其系数行列式为0,即 5.5.7 因网络aa′-bb′是两个网络(有源和无源)并-并联接,所 以 5.5.8 式中,e表示晶体管,n表示无源网络。即
并-并联接,所 以 式中,e表示晶体管,n表示无源网络。即")
28
5.5.9 这就是反映振荡器满足平衡条件。使用上述方法时,应 使两个网络的电压、电流方向符合电压取样、电流求和的条 件。 5.5.9式中[ye]是晶体管参数,可以测得和计算出,[yn]则 可以由具体网络根据y参数的定义求得。 假设,振荡器的工作频率远低于fT,且忽略内部反馈的 影响和不计晶体管的电抗效应,有 5.5.10
![5.5.9 这就是反映振荡器满足平衡条件。使用上述方法时,应. 使两个网络的电压、电流方向符合电压取样、电流求和的条. 件。 5.5.9式中[ye]是晶体管参数,可以测得和计算出,[yn]则.](http://slidesplayer.com/slide/11233670/60/images/28/5.5.9+%E8%BF%99%E5%B0%B1%E6%98%AF%E5%8F%8D%E6%98%A0%E6%8C%AF%E8%8D%A1%E5%99%A8%E6%BB%A1%E8%B6%B3%E5%B9%B3%E8%A1%A1%E6%9D%A1%E4%BB%B6%E3%80%82%E4%BD%BF%E7%94%A8%E4%B8%8A%E8%BF%B0%E6%96%B9%E6%B3%95%E6%97%B6%EF%BC%8C%E5%BA%94.+%E4%BD%BF%E4%B8%A4%E4%B8%AA%E7%BD%91%E7%BB%9C%E7%9A%84%E7%94%B5%E5%8E%8B%E3%80%81%E7%94%B5%E6%B5%81%E6%96%B9%E5%90%91%E7%AC%A6%E5%90%88%E7%94%B5%E5%8E%8B%E5%8F%96%E6%A0%B7%E3%80%81%E7%94%B5%E6%B5%81%E6%B1%82%E5%92%8C%E7%9A%84%E6%9D%A1.+%E4%BB%B6%E3%80%82+5.5.9%E5%BC%8F%E4%B8%AD%5Bye%5D%E6%98%AF%E6%99%B6%E4%BD%93%E7%AE%A1%E5%8F%82%E6%95%B0%EF%BC%8C%E5%8F%AF%E4%BB%A5%E6%B5%8B%E5%BE%97%E5%92%8C%E8%AE%A1%E7%AE%97%E5%87%BA%2C%5Byn%5D%E5%88%99..jpg "可以由具体网络根据y参数的定义求得。 假设,振荡器的工作频率远低于fT,且忽略内部反馈的. 影响和不计晶体管的电抗效应,有")
29
由下图,根据y参数的定义,可求得无源网络|yn|为

30
无源网络 将式 和5.5.11代入式5.5.9得 整理得

31
5.5.12 令其虚部等于0,可求得振荡频率为 5.5.13 式中 可见,电容三点式振荡器的振荡频率略高于回路的谐振 频率,且与晶体管的参数有关。

32
令其实部等于0,并近似认为 ,可求得其振荡平
衡条件为 5.5.14 用微变参数代替平均参数,可求得起振时所要求的最小 跨导(gm)min,其起振条件为 5.5.15 因 5.5.16 代入上式得
min,其起振条件为 因 代入上式得.")
33
5.5.17 从图(a)可以看出,反馈电压 不仅取决于电容C2 , 还与晶体管的输入导纳gie有关。当gie较小时,gie的分路作 用可以忽略,此时第一项起主要作用 当 ,利于起振。 当gie较大时,gie的分流作用不能忽略,此时第二项起主 要作用, 则 ,难于起振。 所以不能简单地认为反馈系数越大,就越易起振,而应

34
该有一定范围。另外反馈系数的大小还会影响振荡波形的好
坏,反馈系数过大会产生较大的波形失真。通常F≈0.01~1 且一般取得较小。 以上的讨论,没有考虑线圈的损耗,如考虑到r的影响, 则起振条件应该修正,如图(b)所示。 将r经过两次折算,折算到ce两端和goe并联,所以起振 条件应修正为 5.5.18
所示。 将r经过两次折算,折算到ce两端和goe并联,所以起振. 条件应修正为")
35
图(a)影响起振因素 图(b)起振条件修正
影响起振因素 图(b)起振条件修正")
36
5.5.3 电感三点式振荡器——哈特莱振荡器 电感三点式振荡器电路如图所示。通常L1、L2同绕在一个骨架上,它们之间存在着互感,且耦合系数M≈1。 电感三点式等效电路

37
电感三点式振荡器的等效电路如下, 是从L2取得的, 故称为电感反馈三点式振荡器。
电感三点式等效电路

38
下面利用基尔霍夫定律列出网孔方程来分析其振荡条件.
由图 (c)列出回路方程: 5.5.19
列出回路方程:")
39
令上面方程组系数行列式D的虚部等于零,得
5.5.20 可见,ωg略低于回路谐振角频率ω0,且振荡频率与晶 体管参数有关。通常 故 5.5.21

40
式中L=L1+L2+2M 为求起振条件,设式5.5.20第三个方程中 的系数为0, 此时令5.5.19式的系数行列式的实部等于0,即 可得振荡平衡条件 5.5.22 因此振荡条件是 5.5.23

41
5.5.24 故起振条件可写成: 5.5.25 至于反馈系数的选取,为兼顾振荡的振荡波形,通常取 F=0.1~0.5。

42
5.5.4 电容三点式与电感三点式振荡器比较 电容三点式: 优点:1.输出波形好,接近于正弦波;
2.因晶体管的输入输出电容与回路电容并联,可 适当增加回路电容提高稳定性; 3.工作频率可以做得较高(利用极间电容) 缺点:调整频率困难,起振困难。 电感三点式: 优点:起振容易,调整方便; 缺点:输出波形不好,在频率较高时,不易起振。
 缺点:调整频率困难,起振困难。 电感三点式: 优点:起振容易,调整方便; 缺点:输出波形不好,在频率较高时,不易起振。")
43
5.5.5 改进型电容三点式振荡器 前面研究的三种振荡器,其振荡频率ω不仅取决于LC回
路参数,还与晶体管的内部参数(Goe、Gie、Coe、Cie)有关, 而晶体管的参数又随环流温度、电源电压的变化而变化,因 此其频率稳定度不高。以电容三点式为例,如图所示,Cie和 Coe分别与回路电容并联,其振荡频率可近似写成 5.5.26 如何减小晶体管电容Coe、Cie对频率的影响呢? 1. 加大回路电容C1和C2的值,但它限制了振荡频率的提高, 同时为确保ω的不变,减小了L的值,随之带来Q值下降,
有关, 而晶体管的参数又随环流温度、电源电压的变化而变化,因. 此其频率稳定度不高。以电容三点式为例,如图所示,Cie和. Coe分别与回路电容并联,其振荡频率可近似写成 如何减小晶体管电容Coe、Cie对频率的影响呢? 1. 加大回路电容C1和C2的值,但它限制了振荡频率的提高, 同时为确保ω的不变,减小了L的值,随之带来Q值下降,")
44
使振荡幅度下降甚至停振。这种方法只适用于频率不高的场 合。 2. 同时减小接入系数pce和pbe,而又不改变反馈系数,这就是
晶体管电容Coe、Cie 对振荡频率的影响 使振荡幅度下降甚至停振。这种方法只适用于频率不高的场 合。 2. 同时减小接入系数pce和pbe,而又不改变反馈系数,这就是 图所示的克拉泼(Clapp)振荡器。这种电路就是在L支路中串 接一个可变的小电容器C3,所以又叫做串联型电容三点式反 馈振荡器,它是在电容三点式的基础上进行了改进。
振荡器。这种电路就是在L支路中串. 接一个可变的小电容器C3,所以又叫做串联型电容三点式反. 馈振荡器,它是在电容三点式的基础上进行了改进。")
45
克拉泼振荡器

46
所以可采用电容三点式的分析方法。 故 5.5.27 式中 5.5.28 5.5.29 可见,ωg只取决于L、C3,而与C1、C2基本无关。于是 可以增加C1、C2(不必减小电感L)以减小晶体管极间电容对频 率的影响,提高了频率稳定度,改变C3即可改变振荡频率而

47
不影响反馈系数,改变C1、C2可调节反馈系数而不会影响振 荡频率。 起振条件可以用式5.5.18来得出,问题是如何求得gL, 由下图所示。
(5.5.18) 克拉泼振荡器的起振条件
 克拉泼振荡器的起振条件.")
48
故 5.5.30 因而起振条件为 5.5.31 而基本放大器谐振时增益为 5.5.32

49
由5.5.31和5.5.32式可见: (1)若C1↑→gL↑↑(分路作用增强) →(gm)min↑ →难于起振; gL↑ Auo↓ →振荡幅度减小 (2)若C3 ↓ →ω0↑→gL↑↑ →(gm)min↑ →难于起振; gL↑ Auo ↓ →振荡幅度减小 (3)若Q0 ↑ →gL ↓ → (gm)min ↓ →易于起振。 gL ↓ Auo ↑ →振荡幅度增大 频率稳定性提高 克拉泼振荡器存在的问题是当增大C1和减小C3时引起 振荡幅度下降,难于起振。原因在于pce下降,使得gL增大, 因为gL和ω03成正比,解决这一矛盾,可以保持C3不变,而
若Q0 ↑ →gL ↓ → (gm)min ↓ →易于起振。 gL ↓ Auo ↑ →振荡幅度增大. 频率稳定性提高. 克拉泼振荡器存在的问题是当增大C1和减小C3时引起. 振荡幅度下降,难于起振。原因在于pce下降,使得gL增大, 因为gL和ω03成正比,解决这一矛盾,可以保持C3不变,而.")
50
在电感L两端并联一个小的可变电容,用以改变振荡频率。 这就是西勒(Seiler)振荡器。因为C4与L并联,所以又成为并
联型电容三点式振荡器。 如下图所示 西勒振荡器的原理图

51
由于C1、C2远小于C4,所以回路电容 5.5.33 再看起振条件,利用式5.5.18 将图 (a)再变换一下,如下图所示,求出gL。 5.5.34
再变换一下,如下图所示,求出gL。")
52
5.5.35 西勒振荡器的起振条件

53
结论: ⑴由(5.5.33)有,C4↓→ω0↑,通过改变C4就可以调整频率; ⑵由(5.5.34)和(5.5.35)有,pce与C4无关,改变C4不会影响pce,这样,改变频率时在波段内振荡幅度变化不大。因此,作为波段振荡器的波段覆盖可以较宽,ka≈1.6~1.8,且在波段内幅度较均匀,其工作频率也较高,可达到数百兆赫。这是一种性能较好的振荡器。 ⑶C3的选取应综合考虑波段覆盖系数,频率稳定度和起振,在保证起振的条件下,C3应选得小一点好。
和(5.5.35)有,pce与C4无关,改变C4不会影响pce,这样,改变频率时在波段内振荡幅度变化不大。因此,作为波段振荡器的波段覆盖可以较宽,ka≈1.6~1.8,且在波段内幅度较均匀,其工作频率也较高,可达到数百兆赫。这是一种性能较好的振荡器。 ⑶C3的选取应综合考虑波段覆盖系数,频率稳定度和起振,在保证起振的条件下,C3应选得小一点好。")
54
5.6 振荡器的频率稳定度 频率稳定度是振荡器非常重要的电气指标之一。例如电 子钟时钟频率不稳,直接影响计时的精度;FM广播如FM发射
频率非常稳定,就可实现自动播音,取代有线广播。 频率准确度和频率稳定度 评价振荡频率的主要指标是频率准确度和稳定度。 频率准确度表明实际工作频率偏离标称频率的程度。它 可以分为绝对频率准确度和相对频率准确度。 定义:绝对频率准确度 5.6.1 相对频率准确度 5.6.2

55
式中,f为实际工作频率,fo为标称频率。
频率稳定度:是在指定时间间隔内频率准确度变化的最 大值。也分为绝对频率稳定度和相对频率稳定度。常用相对 频率稳定度表示。 5.6.3 频率稳定度按时间间隔分为: 长期频率稳定度——数月或一年内的相对频率准确度; 短期频率稳定度——一天内的相对频率稳定度; 瞬时频率稳定度——秒或毫秒内的相对频率稳定度。 频率稳定度数据处理方法有:

56
1.均方根值表示法:它是用在指定的时间间隔内测得的各频
率准确度与其平均值的偏差的均方根值来表征的。即 5.6.4 式中,n为测量次数, 为n个测量数据的平均值。 2.阿伦(Allon)方差表示法: 5.6.5 式中,τ——每次测量的取样时间;n为测量组数;fo为 标称频率;j为正整数(j=1,2,3,…,n);f2j,f2j-1分别为2j次和 2j-1次所测得的频率值。
方差表示法: 式中,τ——每次测量的取样时间;n为测量组数;fo为. 标称频率;j为正整数(j=1,2,3,…,n);f2j,f2j-1分别为2j次和. 2j-1次所测得的频率值。")
57
5.6.2 频率稳定度分析 为寻求提高频率稳定度的途径,就必须找出引起频率不 稳的因素。 一、相位平衡条件
由物理知识可知,任何平衡都要相应地考虑是否稳定平 衡。所谓稳定平衡是当外因使系统偏离原来的平衡状态,一 旦外因消除后,系统能自动地恢复到原来的状态;否则就是 不稳定平衡。例如一个小球放置在抛物面形的锅底就属于稳 定平衡,杂技表演者用头顶篮球就是不稳定平衡。 作为正弦振荡器,通常情况下,人们希望它是稳定振荡

58
其振荡的幅度、频率(相角)不随时间而变化。即使有变化,
希望它尽快地恢复到原来的稳定状态。 不稳定因素也会破坏相位平衡条件。如电流电压的波动 或者工作点的变化会使晶体管Yfe的相角φfe发生变化。相角 的变化必然会引起频率的变化。因为 设外因引起的相角变化 ,即反馈电压 比原来的 输入电压 的相位超前了,相当于提高给回路的补充能量, 振荡频率就提高了;反之, , 相位滞后于 ,频率就 下降。因此外因引起的相角的变化,相位变化又引起频率变

59
化的趋势是 为了使振荡器的相位平衡条件稳定,必须使得频率变化 时产生相反方向的相位变化,以补偿外因引起的相位变化。 因此,相位平衡的稳定条件是: 5.6.6 而振荡器的相移: 5.6.7 式中, 为晶体管正向传输导纳相移, 为回路相移, 为反馈网络相移。

60
5.6.8 当 时 因此,相位的稳定条件为 由此可见,振荡器的相位平衡条件是靠并联回路的相频 特性来保证的。回路的品质因数Q值越高,这种稳频能力越 强。

61
二、频率稳定度分析 根据式5.4.6 ,振荡器的ω主要取决于 回路的L、C,当然也与晶体管的参数(G∑)有关。从相位平 衡条件可知,电路中任何一个相角发生变化都会使振荡频率 产生变化,而使振荡器重新平衡在某一新的频率上。例如温 度、湿度、电源电压、负载等的变化以及机械振动的影响都 有可能引起回路元件参数(L、C、Q等)。有源器件参量和相 角 、 、 发生变化,而使ω发生变化。令α代表外界不 稳定因素,由于振荡器各相角都是外界不稳定因素α和频率 的函数。所以相位平衡条件可以写成:
。有源器件参量和相. 角 、 、 发生变化,而使ω发生变化。令α代表外界不. 稳定因素,由于振荡器各相角都是外界不稳定因素α和频率. 的函数。所以相位平衡条件可以写成:")
62
5.6.9 当α变化时,ω也相应变化,只要相位平衡条件重新得 到满足,则 对式5.6.9全微分 因而 由于 、 对频率变化的敏感性远小于 对频率变化的

63
敏感性,即 又ω≈ω0则上式可近似写成 5.6.10 从式5.6.10可知提高振荡器频率稳定度的一般规律: 要小。要尽量减小外界不稳定因素α的变化,最主要 的是减小振荡回路固有频率 的变化量 (2) 分子 越小越好,在外界因素α变化时,
 分子. 越小越好,在外界因素α变化时,")
64
的变化量尽量小。或者设法使 三个量 不完全同号,相互抵消。 (3) 分母 越大越好。即要求并联谐振回路相频特性的斜 率要大,在较小斜率增量作用下,能产生足够的相位来补偿 外因所引起的 的相移。 由并联振荡回路的相频特性可知,Q越高,ω越接近ω0 相频特性就越大。因此应尽量提高Q值,减小 相角。 以上研究了提高频率稳定度的原则性措施,为了将上述 措施具体化,下面讨论振荡频率与电路参量之间的关系。

65
并联谐振回路的相频特性为: 5.6.11 由相位平衡条件: 得 即 则振荡频率ω为: 5.6.12 对式5.6.12全微分得:

66
当 时, 5.6.13 该式表明了 对频率稳定度影响的定量 关系,可以看出: (1) 均影响振荡器的频率稳定度; (2) 对频率稳定度的影响最严重;
 均影响振荡器的频率稳定度; (2) 对频率稳定度的影响最严重;")
67
(3) △Q对频率稳定度的影响要考虑到系数 ,Q越高, 越小,△Q的影响越弱; (4) 对频率稳定度的影响要考虑到系数 ,Q 越高, 越小,则 的影响越弱。 结论:要提高频率稳定度,首先要提高回路的标准性。 所谓回路的标准性就是指回路在外界因素变化时保持其固有 谐振频率不变的能力。 越小标准性越高。此外,要求Q 值要高, 要小。

68
5.6.3 提高频率稳定度的措施 要提高频率稳定度可采取如下两方面的措施:1.减小 △α;2.减小外界因素对ω0、Q、 的影响,即为外界因
减小外界因素变化△α的措施 影响振荡频率的外界因素主要有:机械振动,环境温度 的变化、湿度及大气压力的变化、电源电压的变化、周围电 磁场的影响、负载不稳定等。 (1)机械振动:回路线圈、电容应具有较高的机械强度, 底板和屏蔽罩必须结实。元器件焊接牢固。加防震措施和调
机械振动:回路线圈、电容应具有较高的机械强度, 底板和屏蔽罩必须结实。元器件焊接牢固。加防震措施和调.")
69
谐回路锁定装置。 (2)温度:将主要元器件放在恒温槽中。合理选择回路元 件的材料,如选用膨胀系数小的金属材料和介质材料。采用 正负温度补偿。也可用热敏电阻稳定偏置。 (3)湿度和大气压力:将振荡器和主要元件密封,还可选 用吸潮性较小的介质和绝缘材料。 (4)电源电压:采用性能好的稳压电源,振荡器单独供电。 (5)周围电磁场的影响:采用电磁屏蔽措施。 (6)负载变化:加缓冲级(跟随器)。 (7)老化:预先对元器件进行老化处理。
电源电压:采用性能好的稳压电源,振荡器单独供电。 (5)周围电磁场的影响:采用电磁屏蔽措施。 (6)负载变化:加缓冲级(跟随器)。 (7)老化:预先对元器件进行老化处理。")
70
2.提高电路抗外界因素影响的能力 (1)提高振荡回路的标准性 所谓振荡回路的标准性就是指振荡回路在外界因素变化 时,保持谐振频率不变的能力。因此,回路的标准性越高, ω0随外界因素的变化越小。 在高Q时,回路的谐振频率为 对上式进行全微分得:

71
即 5.6.14 式中负号表示L或C增加时,ω0降低。可见谐振频率相 对变化量的L和C的相对变化量之和成正比。因此,提高回路 的标准性,也就是当外界因素变化时,减小L和C的相对变化 量。 ㈠. 采用高质量的回路元件 目前使用较广的是在高频陶瓷上用烧渗银的方法制成的 电感线圈。其特点是损耗小且温度膨胀系数小,吸水性小。 高质量的电容则采用膨胀系数小的金属(如殷钢)作极片的
作极片的.")
72
空气电容或云母电容器。还可以采用温度补偿的方法。
㈡. 减小分布电容和引线电感。引线尽可能短,且应有 足够的机械强度,各引线和元器件的连接和安装尽可能牢 靠。 ㈢. 减小不稳定电容对回路标准性的影响,即减小不稳 定电容在回路中所占的比重。可以有两种方法,一是降低振 荡频率,可选的集中参数电容容量大,降低不稳定电容占回 路总电容量的比重。所以,为了提高频率稳定度,在无线电 设备中总是希望主振器工作在较低的频段,然后采用倍频的 方法达到规定的频率。另外一种方法是在满足起振的条件下

73
尽量减小回路与负载、有源器件之间的耦合,即采用部分接
入的方法。 ㈣. 提高回路的有效Q值。采用先进工艺提高线圈本身 的Q值。 (2) 减小相角 、 及其变化量 ㈠. 是平均正向传输导纳的相角,它主要由以下两个 原因产生:一是载流子在基区渡越时间的影响。二是高次谐 波的影响。前者可选用fT高的晶体管,使 减小,通常选 fT=10f 。后者,主要是因为回路的Q值有限,高次谐波在回 路上总有一定的压降,使得回路电压uC不是理想的正弦波而
 减小相角 、 及其变化量. ㈠. 是平均正向传输导纳的相角,它主要由以下两个. 原因产生:一是载流子在基区渡越时间的影响。二是高次谐. 波的影响。前者可选用fT高的晶体管,使 减小,通常选. fT=10f 。后者,主要是因为回路的Q值有限,高次谐波在回. 路上总有一定的压降,使得回路电压uC不是理想的正弦波而.")
74
有畸变,通过反馈使集电极电流不是理想的尖顶余弦脉冲。
㈡. 反馈系数相角 是回路电压 与反馈电压 之间的 相角。产生这个相角的主要原因是由于基极电流的存在及在 振荡回路中具有一定的损耗以及晶体管的Gie、Goe的存在。

75
5.7 石英晶体振荡器 石英谐振器的符号和等效电路如图所示。其串联谐振频率为 C r q L J T b a

76
当等效电路并联时,并联谐振频率为: 石英谐振器的电抗-频率特性如图所示 x o 容性 O w q p 感 性

77
5.7.1 并联型石英晶体振荡器 把晶体作为一个感性元件置于反馈网络的振荡电路中,与其他回路元件一起构成三点式振荡器。
并联型石英晶体正弦波振荡电路的电路原理如图。振荡电路的选频网络由石英晶体和电容C1、C2组成。电路的交流等效电路如图(b)所示。图中Rb=Rb1∥Rb2。该等效电路类似于改进型电容三点式振荡器。其振荡频率为 式中
所示。图中Rb=Rb1∥Rb2。该等效电路类似于改进型电容三点式振荡器。其振荡频率为. 式中.")
78
并联石英晶体振荡器及等效电路

79
5.7.2串联型石英晶体振荡器 这种振荡器类似于三点式振荡器,区别就是两个分压电容C1、C2的中间抽头通过石英谐振器接到晶体管的发射极,完成正反馈的作用。石英晶体在串联谐振时阻抗接近于零,可认为是短路,此时正反馈最强,满足振荡条件。

80
5.8 振荡器中的几种现象 5.8.1 寄生振荡 振荡器电路中产生的各种非需要的频率的振荡。
5.8 振荡器中的几种现象 寄生振荡 振荡器电路中产生的各种非需要的频率的振荡。 在高频放大器或振荡器中,由于某种原因,会产生不需要的振荡信号,这种振荡称为寄生振荡。如第3章介绍的小信号放大器稳定性时所说的自激,即属于寄生振荡。 产生寄生振荡的形式和原因是各种各样的,有单级和多级振荡,有工作频率附近的振荡或者是远离工作频率的低频或超高频振荡。 消除寄生振荡的根本措施是破坏振荡电路在寄生振荡频率上的振荡条件。

82
(1)低频寄生振荡 产生的原因:电路中电感量很大的扼流圈和容量很大的隔直流电容所决定的频率远低于工作频率。 消除措施:尽可能减少扼流线圈的电感量,以降低寄生振荡回路的谐振阻抗;在扼流线圈两端并一大电阻或串联一小电阻以降低其Q值,通过增加损耗来破坏其振幅条件等。 (2)超高频寄生振荡 产生的原因:晶体管的极间电容、分布电容以及引线电感的影响所致。 消除措施:元件的排列和布线合理,避免出现放大器输入和输出回路之间的耦合。PCB板采用短而粗的引线,以减小引线电感;在基极或集电极上串一个小的无感电阻,以降低Q值,消除振荡的可能发生等。 对工作频率附近的寄生振荡,可通过合理设计放大器并采用失配法和中和法来消除。
超高频寄生振荡. 产生的原因:晶体管的极间电容、分布电容以及引线电感的影响所致。 消除措施:元件的排列和布线合理,避免出现放大器输入和输出回路之间的耦合。PCB板采用短而粗的引线,以减小引线电感;在基极或集电极上串一个小的无感电阻,以降低Q值,消除振荡的可能发生等。 对工作频率附近的寄生振荡,可通过合理设计放大器并采用失配法和中和法来消除。")
83
间歇振荡 LC振荡器在建立振荡的过程中,有两个互有联系的暂态过程,一个是回路上高频振荡的建立过程;另一个是偏压的建立过程。回路有储能作用,要建立稳定的振荡器需要有一定的时间。

84
振荡器的占据现象 在一般LC振荡器中,若从外部引入一频率为fs的信号,当fs接近振荡器原来的振荡频率f1时,会发生占据现象,表现为当fs接近f1时,振荡器受外加信号影响,振荡频率向接近fs的频率变化,而当fs进一步接近原来f1时,振荡频率甚至等于外加信号频率fs,产生强迫同步。

85
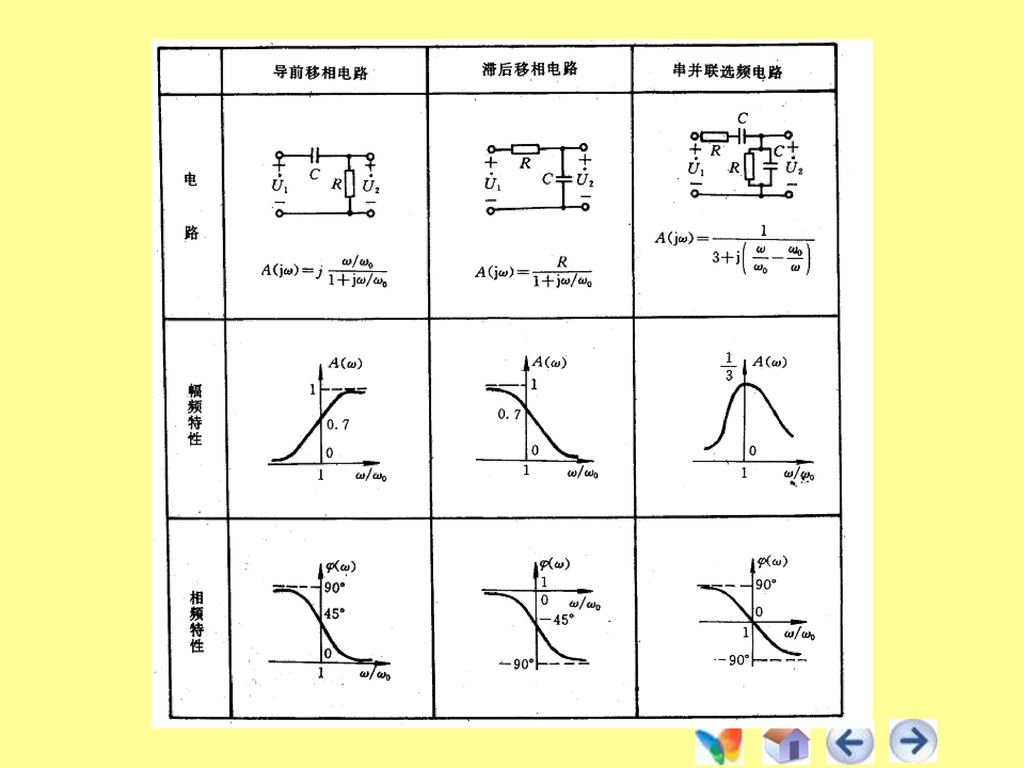
5.9 RC 振 荡 器 当要求产生频率在几十千赫以下的正弦波信号时, 如仍采用LC回路作选频网络, 则所需回路电感量很大, 使元件体积增大, 且使用不方便。 这时, 可以改用RC电路作选频网络, 同时采用晶体管或集成电路作为放大器, 组成RC振荡器。RC振荡器也是一种反馈型振荡器, 用于产生低频正弦波信号。 下表是三种常用的RC选频网络电路及其电压传输系数A(jω)和频率特性。其中, 导前移相电路和滞后移相电路分别具有高通滤波和低通滤波的特性, 其幅频特性分别是单调递增和单调递减曲线, 选频特性很差; 串并联选频电路具有类似LC回路的带通滤波特性, 但选择性能不如LC回路。 三种RC电路均具有负斜率的相频特性, 满足振荡器的相位稳定条件。
和频率特性。其中, 导前移相电路和滞后移相电路分别具有高通滤波和低通滤波的特性, 其幅频特性分别是单调递增和单调递减曲线, 选频特性很差; 串并联选频电路具有类似LC回路的带通滤波特性, 但选择性能不如LC回路。 三种RC电路均具有负斜率的相频特性, 满足振荡器的相位稳定条件。 ")
87
文氏电桥振荡器 由上图可知, 串并联选频电路在ω=ω0处的相移为零, 所以, 为了形成正反馈, 必须采用同相放大器。通常可以采用两级共射电路组成, 或者采用同相集成运算放大器。后者所组成的振荡电路如下图所示。(a)图可以改画成如(b)图所示的文氏电桥电路形式, 因而称为文氏电桥振荡器。 与LC振荡器相同, RC振荡器也必须满足起振、 平衡和稳定三个条件。
图可以改画成如(b)图所示的文氏电桥电路形式, 因而称为文氏电桥振荡器。 与LC振荡器相同, RC振荡器也必须满足起振、 平衡和稳定三个条件。 ")
89
文氏电桥振荡器的反馈系数(即串并联选频电路的传输系数)为:
其中振荡角频率 或 所以

90
所以, 在N(ω)= 处, 有ω1=0.3ω0, ω2=3.3ω0。 可见, 串并联选频电路的幅频特性不对称, 且选择性较差。 由于串并联选频电路组成的反馈网络在振荡频率f0处的增益为1/3, 所以同相运放的起始增益必须大于3, 才能满足环路增益大于1的振幅起振条件。LC振荡器的振幅平衡和稳定条件是依靠晶体管的非线性特性来满足的, 而文氏电桥振荡器由于串并联选频电路的选频特性差, 不能有效地滤除高次谐波分量, 所以, 放大器必须工作在线性区, 才能保证输出波形非线性失真小。为此,采用了以下两个方法:

91
(1) 引入负反馈以减小和限制放大器的增益, 使在开始时放大器增益略大于3, 这样, 环路增益仅在振荡频率f0及其附近很窄的频率段略大于1, 满足振幅起振条件, 而在其余频段均不满足正反馈振幅起振条件。 (2) 在负反馈支路上采用具有负温度系数的热敏电阻(如图 (a)中的Rt)。 起振后, 振荡电压振幅逐渐增大, 加在Rt上的平均功率增加, 温度升高, 使Rt阻值减小, 负反馈加深, 放大器增益迅速下降。 这样, 放大器在线性工作区就会具有随振幅增加而增益下降的特性, 满足振幅平衡和稳定条件。
 在负反馈支路上采用具有负温度系数的热敏电阻(如图 (a)中的Rt)。 起振后, 振荡电压振幅逐渐增大, 加在Rt上的平均功率增加, 温度升高, 使Rt阻值减小, 负反馈加深, 放大器增益迅速下降。 这样, 放大器在线性工作区就会具有随振幅增加而增益下降的特性, 满足振幅平衡和稳定条件。 ")
92
串并联选频电路的相频特性具有负斜率, 所以满足相位稳定条件。
可见, 文氏电桥振荡器是依靠外加热敏电阻形成可变负反馈来实现振幅的平衡和稳定, 这种方法称为外稳幅; 而像LC振荡器那样依靠晶体管本身的非线性特性来稳定振幅的方法称为内稳幅。 串并联选频电路的相频特性具有负斜率, 所以满足相位稳定条件。

93
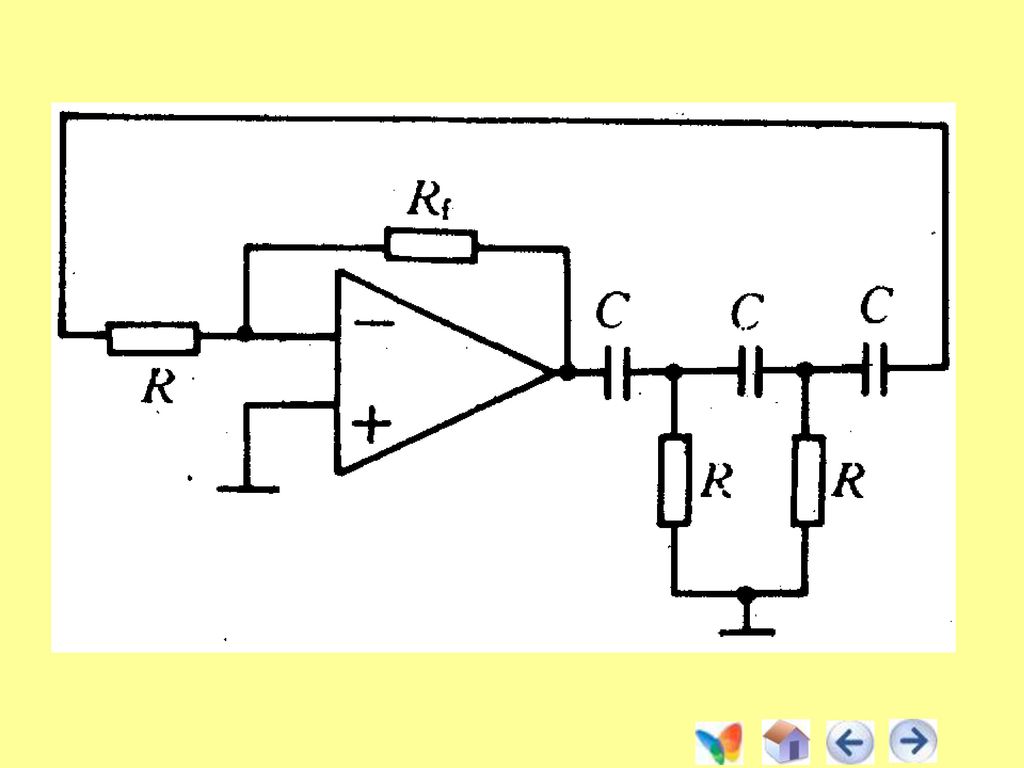
RC相移振荡器 由前面的表可知, 一节导前移相或滞后移相电路实际能产生的相移量小于90°(当相移趋近90°时, 增益已趋于零), 所以, 至少要三节RC移相电路才能产生180°相移。由三节移相电路和反相放大器就可以组成正反馈振荡器。 下图给出了由三节导前移相电路和集成运放组成的RC相移振荡器。该振荡器的振荡频率f0和振幅起振条件分别为:

95
RC相移振荡器是采用内稳幅的振荡电路, RC移相电路的选频性能又很差, 因而输出波形不好, 频率稳定度低, 只能用在性能要求不高的设备中。

96
5.10 负阻振荡器 负阻:电流增大、电压减少 隧道二极管消耗的功率:一部分为直流功率,由直流电源提供;另一部分为负交流功率,即器件向外输出交流功率。 因而能将直流电能转换为交流电能。

97
负阻振荡器的组成条件: 1。由负阻器件和LC选频网络组成; 2。静态工作点选择在负阻特性区; 3。负阻器件和LC选频网络正确连接; 负阻振荡器的振荡频率:

98
本章小节 1. 一般来说,正弦波振荡电路由四部分组成: 放大电 路、反馈网络、选频网络和稳幅环节。 2. 注意幅度平衡条件和相位平衡条件。
一般来说,正弦波振荡电路由四部分组成: 放大电 路、反馈网络、选频网络和稳幅环节。 注意幅度平衡条件和相位平衡条件。 RC振荡电路的选频网络由电阻R和电容C组成,其振荡频率与RC成反比,这种振荡器可产生几赫至几百千赫的低频信号。 LC振荡电路的选频网络由电感L和电容C组成,其振荡频率通常f0可达一百兆赫以上。

99
5. 频率稳定度是振荡器非常重要的技术指标之一。 频率
稳定度按时间间隔分为长期、短期和瞬时频率稳定度。 石英晶体振荡器相当于一个高Q值的LC电路。 当要求 正弦波振荡电路具有很高的频率稳定性时,可以采用石英晶 体振荡器,其振荡频率决定于石英晶体的固有频率,频率稳 定度可达10-6~10-8的数量级。

Similar presentations






 课堂引入 仔细观察下列图片,思考这些图片有什么样 的特点.>")
 105 年 5 月 15 日(日) 08:20- 08:30 考試說明 08:20- 08:30 考試說明 08:30- 09:40 社 會 08:30- 09:40 自 然 09:40- 10:20 休息 09:40->")

招生对象:初中毕业生 (二)学制:五年 (三)办学层次:专科.>")










