Download presentation
Presentation is loading. Please wait.

1
上海交通大学附属中学 李由 晏敏宽 刘华典 指导老师:朱乔荣 徐忠惠 制作:李由
仿生水母潜水器 上海交通大学附属中学 李由 晏敏宽 刘华典 指导老师:朱乔荣 徐忠惠 制作:李由

2
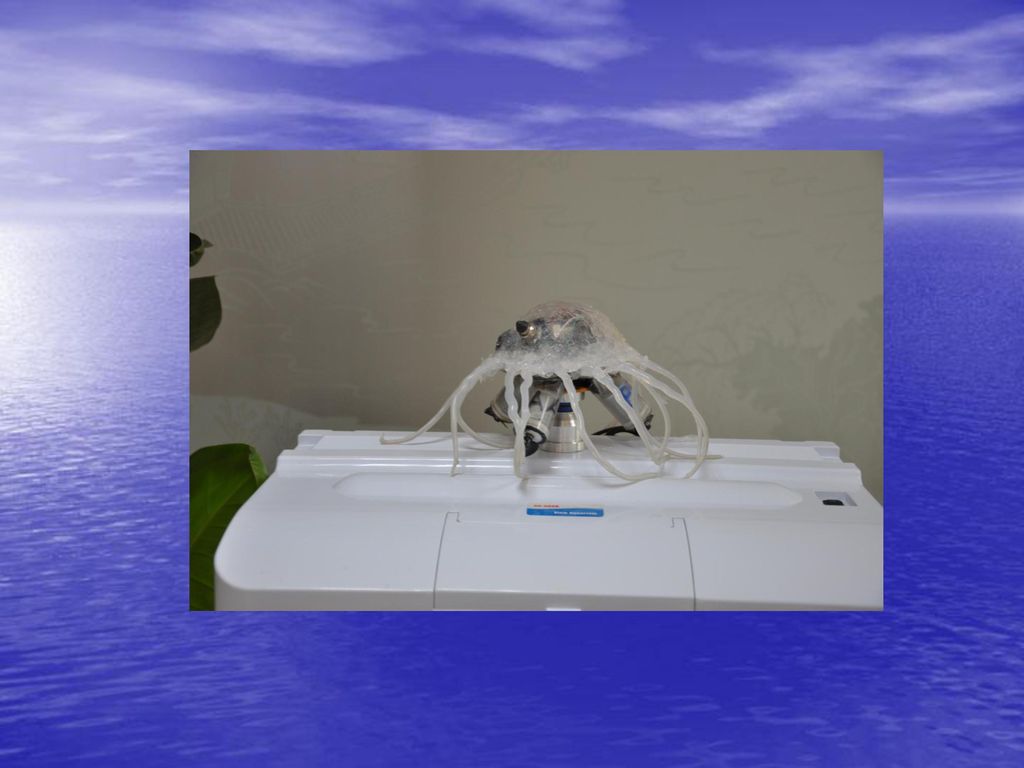
水母2号 水母3号 水母1号

3
现有的潜水器,如潜艇、深潜器等,其推进方式虽然相当成熟,但较为复杂。以通常的潜艇为例:潜艇的推进系统主要由螺旋桨、压载水舱、平衡水舱、水平升降舵、方向舵等部分组成。螺旋桨为潜艇提供动力;潜艇可利用压缩空气向压载水舱内注水及排水,控制潜艇的潜深;潜艇的艇首和艇尾有数个平衡水舱,向其中的某一些注水,即可改变潜艇整体的姿态;水平升降舵亦可改变潜艇的姿态,对潜艇的潜深作出小幅度的调整;方向舵可以改变潜艇在水平面内的前进方向。

4
上述机构的运作相互联系,如:平衡水舱和水平方向舵往往需要共同工作以调整潜艇的姿态;而平衡水舱、水平升降舵、方向舵等装置的有效运作,则必须由螺旋桨提供推力作保证。由此看来,现有的潜艇,以及凭借上述原理设计的潜水器,不仅装置繁多,机构复杂,协调管理这些装置共同运作也相当困难。另外,现有的深潜器下潜时需要抓取重物,上浮时则必须将这些重物抛去。在这一过程中,最容易出现故障。虽然这样做可以节约能量,但若能在需要的情况下避免这一过程,也不失为一个良好的选择。因此,设计制作一款推进系统简洁,易于整体协调控制的潜水器是有必要的。 最近试航的国产载人7000米深潜器--蛟龙号

5
人类自工业革命以来,不过经历了200余年,而自然界的生命演化,却已有数十亿年的历史。因此,学习、模仿、复制、再造生物的结构、功能、工作原理和控制机制的仿生学,对科技的发展起到了巨大的推进作用。从模仿鲨鱼鳞片的鲨鱼皮泳衣,到模仿苍耳的芒刺的尼龙搭扣,无不是人类模仿生物所取得的巨大成就。 尼龙搭扣 鲨鱼皮泳衣-- 显微镜下

6
草履虫 潜水器是在水中运行的。水中生物的推进方式大体上有三种,即以鱼类为代表的摆尾推进法、以水母为代表的喷水推进法和以草履虫为代表的纤毛抖动推进法。其中,针对鱼类的仿生项目在国内外层出不穷,研究已较为成熟;以纤毛抖动前进,效率较低,难以有效应用。而针对水母的的模仿,目前还基本是一个空白点。

7
水母是一种腔肠动物,在淡水和海水中都有分布。水母总体上由头部(伞盖)和着生在头部下端的触须这两部分组成。水母的伞盖比较薄,透明而富有弹性,呈半圆球壳状,里面含有强有力的肌肉。伞盖内部于是自然地形成了一个腔体,腔体内注满了水,与外界的水体相通。每一次喷水时,伞盖中的肌肉剧烈收缩,腔体的体积突然变小,水被向后挤压出去,推动水母前进。随后,伞盖内的肌肉缓慢舒张,腔体体积恢复原来大小,水流回腔体,为下一次喷水做好准备。 这一缩一放的速度不同,所形成的水的动量差值,就是水母能够前进的原因。

8
我们将三支推进器安装在潜水器头部的下面,两两之间成平面120°角,各自与所连接的头部下端的面板成60°角。这样一来,三支推进器产生的推动力就成为了空间内的矢量,对潜水器的控制因此而变得非常简洁。三支推进器同时运转,潜水器竖直上浮;三支推进器同时停止运转,潜水器在重锤的带动下竖直下沉。使一支或两支推进器运转,潜水器则向矢量和所指的方向移动。此外,如果使用螺旋桨作为驱动器,三个螺旋桨的转矩可以相互抵消,解决了困扰普通潜水器的转矩问题。

9
我们发现,仅有推进器是不够的。潜水器难以保持稳定的姿态,会在水中翻转。潜水器的浮力也大于重力。所以我们在水母潜水器头部的下面,三支推进器的中间安装了一个重锤。重锤可以控制潜水器的姿态,使潜水器总是大体保持头部在上,重锤在下的状态,避免了潜水器不受控制地翻转。重锤还部分地代替了推进器的功能,将所需推进器的数量降低为3个。重锤的重量与潜水器本身的重量之和,略微大于整个潜水器的排水量。将潜水器浸没在水中,潜水器会缓缓下沉,无需另一个推进器提供向下的推力。

10
水母潜水器采用小型直流电机作为动力来源。
在水母1号和水母2号中,三个电机分别安装在三支推进器内,带动各自的螺旋桨旋转,产生推力。潜水器三只推进器平面交角120°角,与水平面成60°的设计,在竖直方向上,永远可以获得86.67%的推进效率,而当两只推进器同时运转时,总的推进效率甚至可以达到90.14%。

12
水母3号的三个电机分别带动三个凸轮转动。每个凸轮都紧压着一个水囊。如果没有凸轮的紧压,水囊会自动弹起,恢复原来的大小。由此,凸轮边缘所在的高度直接决定了水囊的容积。我们所采用的凸轮的曲线轮廓有一段快速段和一段慢速段,挤压水囊为快速段,放松水囊使水囊弹起为慢速段,与水母腔体喷水时快速收缩,吸水时缓慢舒张的过程相对应。 潜水器头部下端的面板上开有三个孔,水囊的开口就粘接在三个孔上面。水囊的内部与外界的水体相通,而水囊的外部则是潜水器干燥的头部(如图)。
。")
13
最初试制水母1号时,我们发现无论采取什么防水措施,螺旋桨驱动轴和每支推进器的外壳之间总要渗进水,严重腐蚀电机。于是我们采用了磁性连轴器,在电机端和螺旋桨端各连接一块永磁铁,两块磁铁之间完全密封。这样一来,即使驱动轴处渗水,电机也不会受到影响。 我们使用有机玻璃制作潜水器的外壳。有机玻璃易于加工,便于用氯仿粘接以防止渗水。水母外壳上的电池充电接口、单片机程序下载接口都使用了防水插座。电源总开关的外面敷设了防水薄膜。

14
水母1号安装了7.4V锂电池。水母2号和水母3号安装了11.1V锂电池,并通过降压芯片提供适合单片机的5V电压。
我们采用89C52单片机控制整个潜水器。单片机的3个管脚通过电机驱动芯片,控制电机的运转与停止。电机的运行状态可以显示在状态显示板上。

15
水母1号采用无线电遥控。我们发现无线电波在水中衰减很快,遥控效果不佳。所以在水母2号和水母3号中,我们改用红外遥控。控制者通过按下遥控器上不同的按键,调用单片机上相应的程序,控制水母执行相应的动作。
水母2号螺旋桨的转速是可以控制的。我们依靠输出不同占空比的PWM波,控制输出给直流电机的电压,改变电机的转矩和螺旋桨的转速。

17
项目的特点与意义 本课题设计制作的仿生水母潜水器,具有以下特点: 采用了矢量化的推进方式,避免了通常潜水器装置众多、控制困难的弊端。
利用了磁性连轴器等装置,有效地防止了渗水。 水母3号利用凸轮——水囊机构,模仿了水母喷水前进的方式,及水母腔体快收慢放的特征,为今后这方面的研究提供了范例。 较为逼真地模仿了水母的外形,外观可爱。 仿生水母潜水器移动灵活,外形可爱,在狭窄空间内的勘测、生物观察、深水勘探、玩具等领域都有发展潜力。未来还有望发展成为潜水器的一种特定形式。

18
进一步研究设想 尽管我们已经在设计制作仿生水母潜水器的过程中付出了很大的努力,这款潜水器仍有很大的发展空间。
对于水母2号而言,目前电机的转速已经可以调整。我们设想将来经过精确的计算,能够编写出完备的程序,做到像赛车、模型飞机等那样,直接用手柄控制潜水器。我们还设想通过提高控制精度在多次调试之后,使潜水器能够悬停在水中。 对于水母3号而言,尽管在我们的努力下,它已经可以模仿真实水母的运动方式了。但是,我们打算在将来对凸轮的曲线轮廓进行进一步的精确设计和计算,使之获得最优的推进效率。而且,真实的水母只有一个腔体,而不是三个。只有一个腔体的好处是显而易见的,腔体本身可以做得很薄,无需做额外的防水抗压处理,只有控制系统和少数机械机构需要防水抗压。这样的话,抗压能力,即潜深将提高很多倍。从最初研究这个课题的开始,我们就设想和论证了使用人工肌肉等材料,如气动人工肌肉、压电材料、形状记忆合金等,给只有一个气囊的水母潜水器提供动力。但我们发现难以获得合适的材料,而且需要解决诸如机械装置的设计、材料在水中的工作条件、供电、控制等一系列问题。这些材料本身的运用也不太成熟。所以我们暂时放弃了这个方案。但我们认为,如要更好地模仿真实水母的运动,仍然必须从单个腔体和使用人工肌肉这一方面着手加以研究。 如果有机会的话,我们将就上述问题继续研究,继续努力。

19
谢谢观看!

Similar presentations









机器人的控制与机构运动学及动力学密切相关。>")
 +无创血压模拟器(Fluke BP-2L) 2012. 09.>")









方塊圖 (b)波形圖.>")