Download presentation
1
第13章 单片机实用技术举例 13.1 智能化温度仪表的设计 13.2 PID智能控制器的设计 13.3 单片机数字万用表的设计
第13章 单片机实用技术举例 智能化温度仪表的设计 PID智能控制器的设计 单片机数字万用表的设计 电子血压计的设计 步进电机在精确走步中的应用 单片机在串行通信中的应用 单片机在气象参数测量中的应用 单片机在模糊控制中的应用

2
第13章 单片机实用技术举例 随着单片机技术的发展,单片机应用已经渗透到各个领域。从家用电器、测量控制仪表、机电—体化产品到人工智能、航天航空等领域都大量应用单片机技术。本章介绍单片机的8个应用例子,来说明如何应用已经学到的知识,结合具体对象的特殊要求,设计单片机的应用电路,阐述单片机的应用方法和设计步骤。

3
l 智能化温度仪表的设计 在工业生产、科学研究和日常生活中,温度是最常用的一个测量参数。传统的温度测量仪表结构复杂,功能有限,特别是在温度值的显示和非线性处理方面,存在许多的缺陷。应用单片机制造的智能化温度测量仪表,具有量程宽,线性度好,显示方便灵活,可以设置操作键盘和语音功能。

4
l3.1 智能化温度仪表的设计 l. 智能化仪表的概念
智能化仪表是常规测量仪表与单片机相结合的产物。智能化仪表能够解决常规仪表不易解决的问题,能够简化仪表电路,提高仪表的可靠性,降低仪表成本。

5
l3.1 智能化温度仪表的设计 智能化仪表的组成框图如下图所示。
传感器 变送器 A / D 单 片 机 显示 串行通信 面板

6
l 智能化温度仪表的设计 在图中,传感器用于信号的检测,通过传感器把要检测的值转换成相应的物理量或电信号。由于这个信号比较微弱,而且通常是非线性的,需要进行放大和线性化处理,具有这种功能的电路就是变送器,它能把检测到的微弱的、非线性的信号变换成标准的1-5V或4-20mA线性变化的电压、电流信号,再由A/D转换器把检测到的模拟量信号转换成对应的0-255的数字量(相对于8位单片机),输入单片机CPU中。在CPU中,通过内部的数据处理程序把测量值在显示器中显示,或者通过单片机的串行输出口把信号传送到其它地方。
,输入单片机CPU中。在CPU中,通过内部的数据处理程序把测量值在显示器中显示,或者通过单片机的串行输出口把信号传送到其它地方。")
7
l 智能化温度仪表的设计 人们可以使用仪表的面板操作键,对仪表的测量功能进行选择。在智能化仪表中,单片机是主要的部分,单片机有存储器、运算器、控制器、输入输出端口和程序存储器,能够实现四则运算、逻辑判断、自诊断、自校正、自适应、自学习等功能。由于有了单片机,可以用软件的方法对测量信号进行线性化处理,从而简化了测量信号处理部分的电路,可以用软件的方法实现测量值的数字化显示,可以通过串行通信实现数据的远程传送,可以与PC机相连,对测量值进行统计、存储、打印等。

8
l 智能化温度仪表的设计 由于有了单片机,可以采用自校正软件技术来消除测量仪表内部的电子元器件产生的电压漂移。可以采用自诊断技术实现仪表的故障自检,或通过面板操作键,进入故障自诊断状态,进行仪表的自诊断,通过显示器来表示故障的类型。可以采用数字滤波技术和单片机的逻辑判断功能,提高测量仪表的抗干扰能力。

9
l3.1 智能化温度仪表的设计 2. 智能化温度仪表的总体设计 (l) 仪表设计要求 温度测量范围: -5℃~55℃
温度测量范围: -5℃~55℃ 温度测量精度: ±0.5℃ 仪表为便携式,三位半液晶显示,设置二个按钮:电源开关、功能键 供电:二节7号电池

10
l 智能化温度仪表的设计 (2) 设计思路 根据温度仪表的设计要求,必须首先进行仪表的外壳设计、液晶显示器选型、按钮选型等工作。然后进行电路的设计和软件的编写。 仪表外壳设计:由于温度仪表是便携式的,要考虑仪表的大小、材质、颜色、显示窗口尺寸位置、按钮位置和电池安放位置,要考虑电路板的大小尺寸和安装方式及以后维修拆装的问题。或者是到市场上选择合适的现成的仪表壳,现成的仪表外壳总有不尽如意的地方,但前期费用小,开发周期短。

11
l 智能化温度仪表的设计 液晶显示器选型:为了适合便携式仪表省电的特点,一般都选择液晶显示器。但是液晶显示器有字段式、点阵字符式、点阵图型等,为了获得较好的显示效果和仪表的个性,需要进行液晶显示器的设计。包括显示的字符多少、大小和位置,包括显示器的引脚排列和使用的驱动器。对于一般的温度测量仪表,可以直接在市场上选择现成的通用的字段式液晶显示器。

12
l 智能化温度仪表的设计 按钮选型:一般电源按钮使用开关式按钮,在关机时切断电源。功能按钮常常使用乒乓式开关,主要用于向单片机在瞬时输入一个电脉冲信号。应该考虑按钮在仪表面板上的安放位置、大小和颜色,使之操作方便,与外壳成为一体。 电路和软件的设计:要充分发挥智能化仪表的特长,尽量简化硬件电路,利用单片机的智能化功能,能用软件解决的尽量用软件来解决,可以节约硬件费用,提高智能化程度。硬件电路要与软件相辅相成。

13
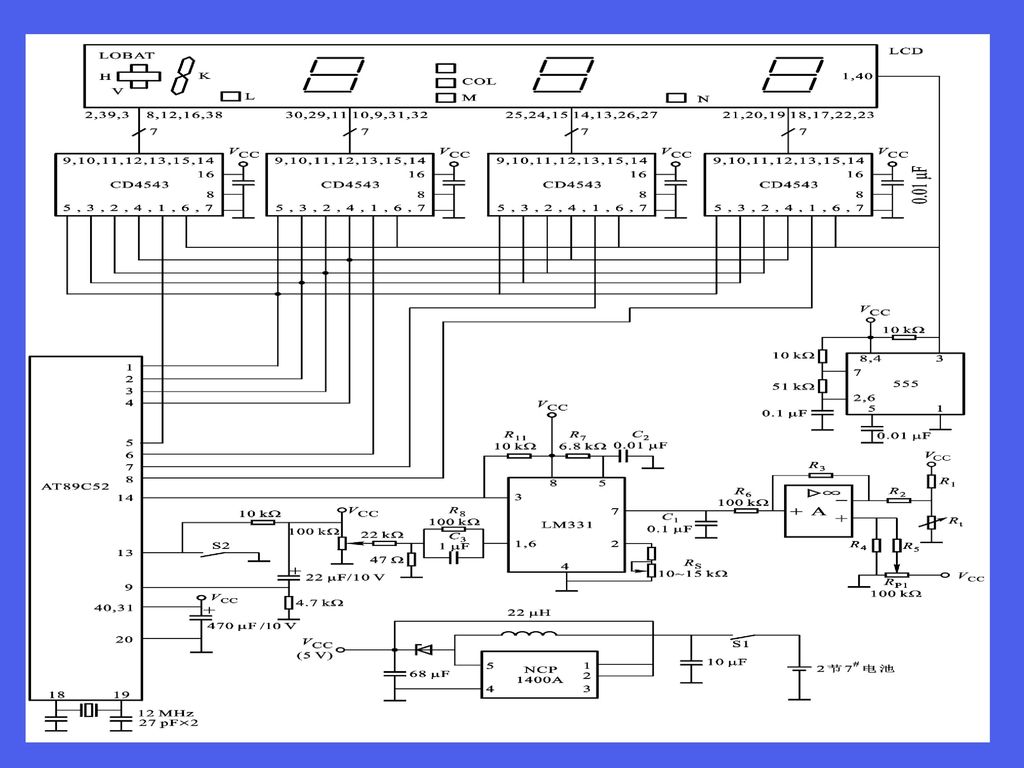
l 智能化温度仪表的设计 3. 硬件电路的设计 根据温度仪表的技术设计要求,硬件电路设计如图13.2所示。

15
l3.1 智能化温度仪表的设计 电路原理图分析如下。 (1) 温度检测部分
图中Rt、电阻Rl组成温度信号的取样电路,其中Rt为热敏电阻温度传感器,运算 放大器A和电阻R2~R5、电位器W1为温度测量电路,由运算放大器A输出与测量温度相对应 的电压信号。 因为温度仪表的温度测量范围是-5℃~55℃,在这一范围内,可以选择的温度传感器有铂电阻、铜电阻、热敏电阻等,但是热敏电阻灵敏度高,反应速度快,测量电路简单,是测量温度的理想传感器。可是热敏电阻的非线性比较严重,在传统测量方法中难以获得好的测量效果,有了单片机,这个问题就可以很方便地予以解决。在本设计方案中,从两个方面采取措施来解决热敏电阻产生的非线性问题。

16
l 智能化温度仪表的设计 措施一,三点式线性校正。所谓三点式线性校正,就是在测量电路里,串联一只固定电阻来补偿热敏电阻的非线性,如图13.3所示。测量电路供电电压为E,使测温范围二等分的三点上误差为0,三点以外的其它各点的误差特性为“S”字形曲线。热敏电阻是负温度系数的非线性的热敏电阻,补偿后,在10ºC范围内,最大误差约为±0.01ºC。在30ºC范围内,约为±0.5ºC。50ºC范围约为±0.6ºC,100ºC范围约为±3ºC。 设0℃时热敏电阻值为Ra,25℃时的热敏电阻值为Rb,50℃时的热敏电阻值为Rc,对应的电路输出分别为Va、Vb、Vc,选择一个电阻R1,使得在0℃、25℃、50℃三点测量无误差。

17
l 智能化温度仪表的设计 热敏电阻阻值-温度特性曲线( ºC),不言而喻,它是非线性的。如图13.4所示,曲线a是热敏电阻没有线性化时的输出电压,把固定电阻R1和热敏电阻Rt串联,使热敏电阻Rt在Ta,Tb,Tc三点的输出电压完全满足线性关系,在三点外的其它温度下,呈现稍有“S”字形的特性,见图13.4中曲线b。当选择两端温度Ta、Tc在测温范围稍内一点的地方时,由于曲线b与理想直线c相交,最大误差比原来的还要小。例如,测温范围是0-50ºC,选择Ta=+3ºC,Tc=+47ºC。此时,误差特性曲线变成0ºC稍有一点误差,+3ºC误差为0,然后又产生误差,并在+25ºC又为0,接着再次出现误差,并在+47ºC再次回到0,+50ºC又稍有一点误差的情形。 补偿电阻R的数值可按下述方法求出。首先,把测量区间划分成二等分,所得三个温度点由低至高分别是Ta、Tb和Tc,相对应的热敏电阻阻值分别是Ra、Rb和Rc。 即有:Vc-Vb=Vb-Va Rc R1+Rc E Rb R1+Rb R1 Ra R1+Ra
,不言而喻,它是非线性的。如图13.4所示,曲线a是热敏电阻没有线性化时的输出电压,把固定电阻R1和热敏电阻Rt串联,使热敏电阻Rt在Ta,Tb,Tc三点的输出电压完全满足线性关系,在三点外的其它温度下,呈现稍有 S 字形的特性,见图13.4中曲线b。当选择两端温度Ta、Tc在测温范围稍内一点的地方时,由于曲线b与理想直线c相交,最大误差比原来的还要小。例如,测温范围是0-50ºC,选择Ta=+3ºC,Tc=+47ºC。此时,误差特性曲线变成0ºC稍有一点误差,+3ºC误差为0,然后又产生误差,并在+25ºC又为0,接着再次出现误差,并在+47ºC再次回到0,+50ºC又稍有一点误差的情形。 补偿电阻R的数值可按下述方法求出。首先,把测量区间划分成二等分,所得三个温度点由低至高分别是Ta、Tb和Tc,相对应的热敏电阻阻值分别是Ra、Rb和Rc。 即有:Vc-Vb=Vb-Va. Rc. R1+Rc. E. Rb. R1+Rb. R1. Ra. R1+Ra.")
18
l 智能化温度仪表的设计 从上面的式子中可以知道,选择一个合适的固定电阻R1,就可以在测量过程中,在0℃、25℃、50℃三点没有无误差。在本例,选用MF5E系列高精度的热敏电阻,B值为3935,25℃时的阻值R25=l0KΩ。该电阻随温度变化的电阻值见表13.1。通过运算可以知道,温度范围在0℃~50℃时,Rl=7.8296KΩ,测量的最大误差点在12.5℃和37.5℃,误差在0.5℃左右,当温度低于-3℃或超过53℃时,误差开始增大。所以本例中仅用一个电阻,电路非常简单,就大大改善了热敏电阻的非线性状态。

19
l3.1 智能化温度仪表的设计 若测量电路的电源电压E=5V,那么
0℃时输出电压 V0=E×R0/(R1十RO)=5× /( 十7.8296) =4.0329V 25℃时输出电压 V25=E×R25/(R1十R25)=5×10/(10十7.8296) =2.8043V 50℃时输出电压 V50=E×R50/(R1十R5O)=5×3.6031/(3.6031十7.8296) =1.5758V
=5× /( 十7.8296) =4.0329V. 25℃时输出电压 V25=E×R25/(R1十R25)=5×10/(10十7.8296) =2.8043V. 50℃时输出电压 V50=E×R50/(R1十R5O)=5×3.6031/(3.6031十7.8296) =1.5758V.")
20
l 智能化温度仪表的设计 分析上面的数据,可以发现25℃的温度差,产生1.2285V的电压差。通过线性化的校正,把电路随温度变化产生的很严重的曲线校正为近似于直线的S形曲线,校正的效果见图13.4所示。

21
l 智能化温度仪表的设计 由于在热敏电阻上输出的电压与温度变化成反比,温度越高,电压越低,为了使输出电压与温度变化成正比,并且使-5℃时的输出电压为0V,图13.2中的放大器A和电阻R2~R5、电位器W1构成一个减法比例放大器,使A的输出电压在-5℃时为0V,55℃时为5V。调节电位器W1使运算放大器A的正向输入端输入一个正电压信号,它的大小等于热敏电阻在-5℃时的输出电压,在运算放大器A的作用,进行减法运算,使运算放大器A在此时输出的电压为OV。然后调节反馈电阻R3使温度在55℃时运算放大器的输出电压为5V,实现了信号的零点调整和满度调节,完成了把温度信号转换成电压信号的工作。 措施二,由于采用三点式线性校正,得到的温度与输出电压信号之间的关系仍为S型曲线,为了得到更好的线性效果,在CPU内部,用软件的方法对曲线进行拟合,求出该曲线的方程,得到最佳的线性化效果。由于三点式线性的校正,降低了曲线方程的次数,便于单片机软件的编程,具体见下面部分的叙述。

22
l 智能化温度仪表的设计 (2) A/D转换部分 主要用于完成将检测到的温度信号的电压模拟量,变换成计算机能够接受的数字量的工作。为了获得温度的正确值,要求A/D转换器有较高的转换精度和较快的转换速度,在本例中,温度的测量范围是 –5℃ - +55℃,精度为±0.5℃,考虑到传感器和测量电路带来的误差和其他因素,要求A/D转换芯片的测量精度在0.2℃左右。而8位A/D转换芯片的测量精度达到0.2℃,其最大的测温范围为50℃左右,所以需要10位A/D转换芯片才能满足测量要求。

23
l 智能化温度仪表的设计 10位的A/D转换芯片与8位的单片机接口比较复杂,考虑到温度是一个变化缓慢的量,在本设计方案中采用V/F转换方式来实现A/D转换。V/F转换方式是把电压模拟量转换成脉冲频率信号,由单片机对脉冲频率信号进行计数来实现A/D转换功能的。LM331是一个简单的、廉价的电压/频率变换电路,非常适合用作模/数转换,有极高的转换精度,且十分适用于低电压,低功耗的数字电路,十分适合用作光电隔离,有良好的共模抑制能力,关于LM331集成电路的性能介绍参见本书的A/D转换部分。LM33l与单片机的接口电路原理见图13.5所示。

24
l 智能化温度仪表的设计

25
l 智能化温度仪表的设计 图中,模拟量检测电路的输出电压Vin输入到LM331的第7脚,在第3脚输出的方波脉冲频率信号,通过10KΩ接到V+电源,目的是使输出的方波脉冲频率信号更加稳定可靠。脉冲频率信号直接加到单片机的T0口,单片机通过计数器记录T0口输入的频率信号,就可以计算出模拟量的大小。从图13.5可以知道,采用V/F转换电路,大大简化了单片机的A/D转换电路,而且只占用单片机的一个端口。LM331的输入电压为0-5V,输出频率最高达100KHz,若转换为1000Hz/V,则测量精度达到1mV,相当于12位A/D转换,非常实用。

26
l 智能化温度仪表的设计 在本例图13.2中的V/F转换电路是LM331的典型应用。运算放大器的输出电压通过电阻R6和电容C1从7脚输入LM331,转换后的方波频率信号从3脚输出到单片机T0口,为了保证信号的电压稳定,接了一个上拉电平电阻R11。电压与频率的转换关系如下式: f= Rs·Vin 2.09 R8·R7·C2

27
l 智能化温度仪表的设计 其中Vin为输入测量电压,在本例中即运算放大器的输出电压,Rs接在2脚为可调电阻,用来校正输出频率。上式中,当R8=100kΩ,R7=6.8 kΩ,C2=0.01μF,调节Rs,可以使Vin=0~5V时,输出频率f=0~5000Hz,即达到电压/频率比为1000Hz/1V。

28
l 智能化温度仪表的设计 在温度值通过热敏电阻Rt、算放大器A和电压/频率变换器LM331后,变成了0~5000Hz的频率信号,可以方便地与单片机CPU相连,其输出频率直接与CPU的定时器/计数器相接就可以了。当频率信号进入单片机CPU后,就可以应用软件的方法,例如最小二乘法,实现对热敏电阻的非线性校正。由于前面的三点式校正已使非线性得到了极大的改善。再使用软件的方法,可以进一步提高线性化效果。实践证明,使用这种方法,在0~100℃的范围内,其测量误差可达到±0.1℃。

29
l 智能化温度仪表的设计 在本例中,-5~55℃的温度变换成0~5000Hz的频率信号后,其分辨率可达到8.3Hz/0.1℃,或0.012℃/1Hz,这种A/D转换的方式电路极其简单,占用CPU的输入/出口少,只占用一个端口,而且分辨率高,可以达到12位A/D转换芯片的效果。所以这种温度测量电路的精度完全能够达到±0.5℃的设计要求。

30
l 智能化温度仪表的设计 (3) 面板操作部分 温度仪表的面板按钮开关键共有二个。一个是电源开关Kl,用于电源的接通与切断。另一个是功能键K2,接到单片机的P3.3端口。K2是乒乓式按钮,当没有按下时,P3.3口的电平信号为高,单片机不作任何处理。当K2按下时,P3.3口的电平信号为低,软件根据K2按下的情况作出相应的处理。 在开机的同时按下K2键并维持3S,表示系统进入自检,显示仪表的征状; 在正常情况下按K2键并维持3S以上,仪表以闪烁的方式显示测量值的最高、最低值; 在正常情况下按K2键,使当时测量的值保持不变,以便观察。 在本例中,使用一个键,配合适当的软件实现多键的功能,是智能化仪表的一个显著的特点,是硬件与软件相结合的例子。

31
l3.1 智能化温度仪表的设计 (4) 单片机CPU部分
智能化温度测量仪表的主要部分是单片机。本例选用MCS-51单片机系列中的AT89C52单片机,是CMOS型的单片机,属于低功耗单片机,内带256字节RAM和8KB字节FLASH ROM,程序可以反复多次电改写,非常适合便携式仪表。在设计中没有对单片机的输入输出口进行扩展,而是充分利用了单片机本身的软硬件资源。

32
l 智能化温度仪表的设计 整个系统5V供电,因为使用内部ROM程序存储器,单片机的3l脚通过电阻接5V,在电源40脚与接地20脚之间加一大的电解电容,是为了改善系统的供电质量。复位电路采用简单的阻容充放电来完成,当电源开关接通5V电源时,5V电平通过电解电容在电阻上产生一个时间宽度大于2OmS的高电平,使单片机CPU得到有效稳定的复位工作信号,使CPU进入正常的工作状态。该仪表没有设计防干扰的看门狗电路,也没有设计手动复位开关。因为作为测量仪表,万一发生干扰使单片机不能正常工作,不会产生什么影响,只要关断电源然后再打开就可以了,同时简化了电路。

33
l 智能化温度仪表的设计 单片机采用12MHz晶体振荡器,补偿电容在20p-40p之间选择,能够可靠地起振。单片机的P1口用于显示驱动、译码和数据传送。P3.0、P3.1用于串行数据传输,P3.2用于接收电源电压低信号,当接收到低电平时,表示电池需要更换,在液晶显示器中显示LOBAT信号提示。P3.3为CPU的定时器/计数器0,即T0。用于接收LM331电路输出的频率脉冲信号,使T0工作在方式l,设定为l6位计数方式,采用外部输入脉冲作为计数脉冲。

34
l 智能化温度仪表的设计 在启动TO开始计数时,使CPU的定时器/计数器T0即Tl为定时器工作方式,采用晶体振荡器的振荡脉冲的12分频信号为计数器的计数信号。由于温度信号是缓慢变化的信号,可以使T0采样0.5S或1S时间的频率值,然后按照相应的关系求出对应的温度值。单片机的其余引脚空余不用。

35
l 智能化温度仪表的设计 (5) 液晶显示部分 液晶显示器采用通用的三位半字段式芯片,本例采用静态显示方式,程序编写方便。图13.2中的CD4543是液晶BCD-7段锁存/译码/驱动器,P1.0-P1.3与CD4543的数据端A,B,C,D相接,将要显示的温度值以四位二进制的BCD码输出到A、B、C、D,通过CD4543译码成7段字符去驱动液晶显示器显示。P1.4-P1.7与4片CD4543的片选端LD相接,把译码好的十进制数送到被译中的CD4543,并加以锁存后驱动相应的液晶显示字段。由555电路组成的振荡器,向CD4543和液晶显示器提供交流信号电源。温度显示共占三位,由三片CD4543来驱动。另外一片CD4543用于小数点、十,- 号、L0BAT等笔划的显示。关于液晶显示器和CD4543有关内容请参看第十章。

36
l 智能化温度仪表的设计 (6) 电源供电部分 温度仪表的供电电压为5V,为了适合便携式的要求,减少重量和体积,而且整个系统是低功耗的,所以采用普通的7号电池二节。二节7号电池在新的时候,串联的最高电压在3.2V左右,用尽时,电压在 V左右。因此必需寻找一种升压电路,使输入电压在2-3.5V的情况下能稳定输出5V电压,并且在输出电压低于4.8V时,能产生一个低电平信号,让单片机作为源电压供电不足的判断。

37
l 智能化温度仪表的设计 在本例中选用NCP1400A列的微功率固定频率脉宽调制升压直流一直流变换器,是安森美半导体公司产品。该系列产品可以在0.8V电池电压起动工作,只需要四个外围器件,可以用简单的方法实现高效变换,其输出电流达到100mA。在器件内部有振荡器、脉宽调制控制器、不连续模式运行的相位补偿误差放大器,图13.6为芯片的引脚排列和典型应用。

38
l 智能化温度仪表的设计 图中电感值在18μH到27μH为好,电容最好选用钽电容,二极管的正向压降要小于0.3V,其中NCP1400ASN50T1芯片的输入电压Vin= V,输出电压Vout= V。因此用二节7号电池可以变换成稳定的5V电压,即使电池用旧仍可以用一段时间,整个温度仪表的最大功耗是单片机89C52,约10-15mA,而芯片能提供100mA电流,完全能够满足。 4. 软件设计

39
l3.1 智能化温度仪表的设计 4. 软件设计 在智能化温度仪表中的软件有温度检测、信号处理、数字显示、键盘判别等程序。
设置T0、T1工作方式 启动T0工作,设置一次采样时间值 启动T1开始计时 一次采样时间到否? 停止T0、T1工作 保持采样值 4. 软件设计 在智能化温度仪表中的软件有温度检测、信号处理、数字显示、键盘判别等程序。 温度检测程序 温度信号通过热敏电阻变换成电压值,由LM33l转换成频率信号,通过T0口对外部输入脉冲计数来测量的,程序框图见图13.7。

40
l3.1 智能化温度仪表的设计 参考程序如下: MOV TMOD,#15H ;设置T0为十六位计数的工作方式 MOV TH0,#00H ;
MOV TL0,#00H ;置T0计数器空,为采用频率信号准备 MOV 30H,#0AH ;设置一次计数的时间 SETB TR ;启动T0计数器开始计数工作 Y1: MOV TH1,#3CH ; MOV TL1,#20H ;置T1计时器初值 SETB TR ;启动T1计时器开始计时 Y2: JBC TF1,Y ;判时间到否 AJMP Y ;继续计时 Y3: DJNZ 30H,Y ;判总的时间到否 CLR TR ;计时时间到,停止计数 CLR TR ; MOV 7BH,TH ; MOV 7AH,TL ;将T0计数的频率值送CPU内存保

41
l 智能化温度仪表的设计 一次采样的时间可以根据需要而设定,由于单片机的工作频率不同,所以Tl的初值也不同,为了提高温度检测的正确性,可以多次采样,然后求平均值作为采样值。由于采用V/F转换方法,所以程序比较简单明了。 信号处理 虽然三点式线性校正改善了热敏电阻的非线性特性,但还不是完全线性的,需要用软件作进一步的线性化处理。可以用最小二乘法进行,最小二乘法是一种数据统计的计算方法。在本例中,可以根据热敏电阻的阻值与温度之间的关系,用电阻箱模拟温度值,记录温度与电路输出频率T一F的对应数据,就可以用最小二乘法求出温度T与频率之间的函数T=f(F),将此函数输入单片机中,就可以很方便地应用软件的方法对测量值作进一步的线性化处理,提高测量精度。关于用最小二乘法求取函数的方法,可以参考有关的书籍。
,将此函数输入单片机中,就可以很方便地应用软件的方法对测量值作进一步的线性化处理,提高测量精度。关于用最小二乘法求取函数的方法,可以参考有关的书籍。")
42
l 智能化温度仪表的设计 除此以外,信号处理程序还包括对检测信号的滤波处理,减少测量过程中的干扰,最简单的方法是算术平均法。对N个采样值,寻找一个Y值作为本次检测的有效值,使Y值与各采样值之间的偏差的平方和为最小,在具体应用中,N值不宜太大,温度测量取N=5-10为好,既保持一定的灵敏度,又有恰当的平滑度。计算方法为: Y=(X1+X2+….+XN)/N,式中X1、、、、X2、、….XN为N次检测量 实践证明用这种方法能正确测量温度值。在获得正确的测量值后,还需要将它转换成相应的实际温度值。 例如,在本例中,如果-5℃一55℃对应的频率为100Hz—4800Hz,且是线性的,那么温度与频率的关系为0.0125℃/Hz,当测量到的频率值为1000Hz,则实际温度是:0.0125℃/Hz×1000-5℃=7.5℃ 在编写程序时必须注意到这一点。
/N,式中X1、、、、X2、、….XN为N次检测量. 实践证明用这种方法能正确测量温度值。在获得正确的测量值后,还需要将它转换成相应的实际温度值。 例如,在本例中,如果-5℃一55℃对应的频率为100Hz—4800Hz,且是线性的,那么温度与频率的关系为0.0125℃/Hz,当测量到的频率值为1000Hz,则实际温度是:0.0125℃/Hz×1000-5℃=7.5℃ 在编写程序时必须注意到这一点。")
43
l 智能化温度仪表的设计 数字显示 在把测量值转变成实际的温度值后,可以把内存中的数据通过P1口输出到外部进行显示。根据原理图13.2可知,P1.0-P1.3为温度数据,P1.4-P1.7为四片CD4543的片选信号,设数据和片选信号存放在CPU的四个内存单元中,逐次传送到30H单元中,30H的低四位为温度数据,高四位为片选信号值,则显示程序可以用语句: MOV 30H,P1 来实现。由于CD4543有数据锁存功能,采用静态显示方式,所以执行三次这样的语句,就可以显示温度的三位数据了,再执行一次这样的语句用于显示小数点位置、+,-符号和其它提示字符,编写的程序也比较简单。

44
l 智能化温度仪表的设计 键盘判别 在本例中只有一个电源开关和功能开关,键盘判别程序主要用于功能开关。如前所述,在开机的同时,CPU检查到K2键按下,并持续3S钟以上,程序转入系统自检,轮流显示液晶显示器的各个笔划、检查键的正常与否、及用25KΩ检查测量电路的正确性。如果在正常的运行中K2键按下并持续3S钟以上,则显示最近以来测量值中的最大值、最小值。如果在正常的运行中K2键按下则将本次测量值保持下来供仔细察看。由于键判别比较简单,读者可以自己编写程序调试。

45
l 智能化温度仪表的设计 5. 印刷电路板的设计 在本例的印刷电路板设计中,考虑到仪表外壳尺寸比较小,电路板不会大,由于引线较多,需要采用双面板进行设计。在设计时应先安排液晶显示器、开关按钮、单片机及有关插座位置,再考虑其它元器件的安装位置,要安排好电源线的走向。一般应用PROTEL软件进行印刷电路板设计,在设计前,应该了解所有元器件的外形尺寸、引脚排列和功能,在布置连线时尽量使—个面的连线相互平行,两个面的连线相互垂直,这样布置比较有规律,不容易在一个面上造成连线交叉,另外,空余的地方尽量用接地线填充满。

46
l 智能化温度仪表的设计 考虑到印刷电路板面积较小,可以采用贴片元件,体积小,质量也好,一般印刷电路板要经过多次修改才能达到比较理想的结果,在设计过程中还要注意安装孔的位置和孔的大小,要考虑到不同元器件的引脚直径,要准确设置孔径的大小,保证元器件的安装和印刷电路板在仪表壳上的安装。印刷电路板设计好后,电路软件可以直接交印刷电路板加工厂商按要求加工。拿到加工好的印刷电路板,还要仔细检查核对,看看连线是否有不恰当或错误的地方,元器件放上去安装焊接是否方便,如果发现有问题,需要修改后重新设计加工,直到完善为止,是一个需要反复的过程。

47
l3.1 智能化温度仪表的设计 6. 仪表的硬件与软件的调试
在印刷电路板加工好进入安装焊接阶段,对于第一次焊接的电路板,应该先焊接电源部分,并把二节7号电池放上,测量各元器件的电源Vc端和接地GND端,如果都是5V,表明电源系统正常,然后再焊接其它部分,其中调试有三个方面: 温度测量部分 用标准电阻箱代替电路中的热敏电阻Rt,模拟温度值的变化,根据理论计算得到的温度与电压的关系,使V1输出电压符合要求。再调节电位器W1,使V2的电压与55℃时的V1电压相等,并调节电阻R3和LM331芯片的W2、R2电位器,用数字万用表的频率挡或频率计,测量LM331的3端输出的频率值,使温度值与相应的频率值符合,完成模拟部分的调试。

48
l 智能化温度仪表的设计 数字显示部分 通过单片机开发装置,编写一段液晶显示检查程序,把要显示的数据直接输出到P1口,就可以使LCD显示各种数据和字符,确定单片机与显示部分的连线正确性和显示部分的电路和元器件的好坏。下面是几个参考语句。 MOV P1,#78H ;使第一位LCD显示字符8 MOV P1,#0B8H ;使第二位LCD显示字符8 MOV P1,#0D8H ;使第三位LCD显示字符8 MOV P1,#0E8H ;使LCD显示其它字符

49
l 智能化温度仪表的设计 单片机部分和应用软件 如果调节电阻箱的电阻值,在液晶显示器上能显示相应的值,按动K2键,有前面表述的功能,表明单片机及应用软件正确。如有故障大多是单片机的复位电路或晶振部分元器件、焊接方面有问题,排除了就能正常工作。在完成了上述工作,说明系统能正常工作,还要进行测量精度的校验。把热敏电阻接到电路的Rt位置,把热敏电阻放在恒温水浴中,放入精确度为0.2℃或以上的标准水银温度表,校验0℃、10℃、25℃、50℃各点误差,如果误差在0.5℃以内,表明温度仪表符合设计要求,如果在某些点误差在0.5℃以上,不符合设计要求,需要测试热敏电阻本身是否合格,需要进一步分析电路中元器件的参数和软件的数据处理方法,直到满足要求为止。

50
PID智能控制器的设计 在工业应用中,常常要进行自动控制,所谓自控制,就是应用控制设备自动地操纵机器或过程,使被控制的机器或过程处于一定的状态。自动控制有多种形式,有开环控制、单闭环控制、串级回路控制等。有许多实施控制的方法,有顺序控制、继电器逻辑控制,有比例、积分、微分控制(即PID控制)、自适应和模糊控制等。而单闭环PID控制是应用最广泛的一种控制。
、自适应和模糊控制等。而单闭环PID控制是应用最广泛的一种控制。")
51
PID智能控制器的设计 l. 自动控制分类 自动控制有开环控制和闭环控制二大类。图13.8是开环控制系统的框图。

52
PID智能控制器的设计 在图中,给定值是希望控制的量,例如,对于一个温度开环控制系统,给定值就是希望控制的温度值。这个控制值输入控制器通过运算,输出控制量,驱动执行机构动作,使被控对象的温度达到给定值温度。由于被控对象的温度没有反馈,所以开环控制系统的控制精度较差,一般应用于控制要求不高的场合。图13.9是闭环控制系统的框图。

53
PID智能控制器的设计

54
PID智能控制器的设计 在图中,闭环系统比开环系统多二个环节,一个是检测器,一个是比较器。检测器用于检测被控对象的输出值,并反馈到比较器,由比较器对给定值和反馈值进行比较后得到的差值e输入到控制器,控制器是按差值进行运算控制的。由于在闭环控制系统中,控制器的输入值包括了给定值和反馈值的信号,被控制值的变化量反馈到输入端,直接影响控制器的运算,所以控制精确,被控参数变化稳定。单回路闭环控制结构是最常用的控制形式,PID控制规律也是经典控制中最常用的控制规律,能够满足大多数工业对象的控制要求。

55
PID智能控制器的设计 2. PID控制 在自动控制中,控制器的调节规律有比例(P)、积分(I)、微分(D)等,PID调节是技术成熟、应用广泛的控制方法。比例作用(P)对偏差反映及时,对静差能有效抑制,积分作用(I)可以消除静差,提高校正控制精度,改善控制系统的静态特性。微分作用(D)可以加快系统的控制速度,减少超调量,改善控制系统的动态特性。将三种调节作用合在一起,形成PID控制,可以有良好的适应性,是模拟调节的基本算法,也是数字调节的基本算法。
、积分(I)、微分(D)等,PID调节是技术成熟、应用广泛的控制方法。比例作用(P)对偏差反映及时,对静差能有效抑制,积分作用(I)可以消除静差,提高校正控制精度,改善控制系统的静态特性。微分作用(D)可以加快系统的控制速度,减少超调量,改善控制系统的动态特性。将三种调节作用合在一起,形成PID控制,可以有良好的适应性,是模拟调节的基本算法,也是数字调节的基本算法。")
56
PID智能控制器的设计 模拟PID控制器 模拟PID控制器,实际上是由电阻,电容,运算放大器构成的模拟电子电路来实现PID运算的功能。图13.10是模拟PID控制电路。

57
PID智能控制器的设计 在图中,前半部分是比例微分(PD)电路,CD、RD及R1、R2组成无源比例微分电路,运算放大器A1构成同相比例放大器。后半部分是比例积分电路,CI、RI构成输入电路,CM为反馈电容,电阻RI、电容CM构成积分电路,电容CI,CM和运算放大器A2构成比例电路。输入信号VI通过PID运算电路得到输出电压信号V0。
电路,CD、RD及R1、R2组成无源比例微分电路,运算放大器A1构成同相比例放大器。后半部分是比例积分电路,CI、RI构成输入电路,CM为反馈电容,电阻RI、电容CM构成积分电路,电容CI,CM和运算放大器A2构成比例电路。输入信号VI通过PID运算电路得到输出电压信号V0。")
58
PID智能控制器的设计 输出信号与输入信号的传递函数关系见图13.11。

59
13.2 PID智能控制器的设计 这就是反映PID电路的输出/输入信号的关系。
为了实现较好的控制效果,需要对PID参数进行整定,调节电位器RD、RpD和RI来获得不同的比例、积分、微分作用,这就是常规的模拟PID调节的原理。

60
PID智能控制器的设计 数字PID控制器 从上面可以知道,比例、积分、微分即PID调节,是指输入量与输出量之间的数学关系,而实现这一数学运算关系是依靠电阻、电容、电感、运算放大器等模拟电路来实现的。而数字控制器主要是依靠数字计算机来实现的,把输入量与输出量之间的数学关系通过软件的运算来完成的。因此数字PID控制器比模拟PID控制器使用更方便,可以实现更完美的控制。

61
PID智能控制器的设计 数字PID控制系统如图13.12所示。与模拟PID控制系统相比,增加了PID调节器、A/D,D/A转换器和三个电子开关。因为计算机是分时工作的,只有在进行调节时,设定值才输入PID调节器中,由计算机软件的运算来替代模拟电路中的电阻、电容、运算放大器的工作,运算后的数字量必须通过D/A转换,才能加到执行器上进行调节。

62
13.2 PID智能控制器的设计 PID智能控制器的设计 PID智能控制器实际上是一个单片机控制器,结构框图见图13.13。 A 单 片 机
对 象 检 测 A / D 单 片 机 显示器 串行通信 执行器 打印机接口 面板键盘

63
PID智能控制器的设计 图中单片机是PID智能控制器的主要部分。A/D变换器把被控对象的状态通过检测装置把模拟量转换数字量输入到CPU中,作为反馈值,A/D转换器的位数根据控制系统的要求而定可以是8位,10位或12位等。A/D转换器的模拟量输入可以是单路或多路的,因为在工业控制系统中,被控对象比较复杂,所处的空间比较大,需要检测很多的量。面板键盘用于设置控制器的设定值和P、I、D的参数直接输入CPU,在智能化PID控制器中,没有电阻、电容、运算放大器等模拟电子元器件组成的运算电路,利用软件对设定值和反馈值直接进行数学的减法运算,得到差值e进行调节,差值e,按下式运算求出V(K)的值。
的值。")
64
PID智能控制器的设计 可以通过面板键盘输入Kp、Ki、Kd不同的值,得到按不同规律运算出来的V(k)值,PID智能控制器经过运算,输出的控制量是数字量,而外界的执行器往往需要模拟量,通过D/A转换,把输出的数字控制值变换成模拟量去驱动执行器,由执行器的动作来改变被控对象的状态,达到控制的目的。由于PID智能控制器要输入的数字较多,操作也较多,一般需要很多键,可以采用矩阵式键盘,用于P、I、D参数的输入,用于被控对象的给定值的输入及一些控制操作命令的输入。
值,PID智能控制器经过运算,输出的控制量是数字量,而外界的执行器往往需要模拟量,通过D/A转换,把输出的数字控制值变换成模拟量去驱动执行器,由执行器的动作来改变被控对象的状态,达到控制的目的。由于PID智能控制器要输入的数字较多,操作也较多,一般需要很多键,可以采用矩阵式键盘,用于P、I、D参数的输入,用于被控对象的给定值的输入及一些控制操作命令的输入。")
65
PID智能控制器的设计 PID智能控制器有许多数据的输入,往往需要显示,对象被控制的状态检测也需要显示。因此显示的内容较多,可以采用LED数码管,发光二极管,光柱等显示元件来完成,也可以用图形式LCD来显示,这部分的设计灵活比较大,要根据控制系统的具体要求来进行选择。

66
PID智能控制器的设计 在许多控制应用场合,需要对被控对象的状态的变化过程等的记录打印,需要将操作设定的内容保存,要设计打印记录装置。有的控制系统需要进行集散控制或数据传送,要通过串行通讯进行数据传送或控制,要设计串行口通讯,以便上位机与下位机之间的通讯。

67
PID智能控制器的设计 电源部分,通常情况下PID控制器都采用220V交流电或+24V直流电供电,内部电路5V直流电压工作。为了便系统工作正常,对电源设计要求较高,要有抗干扰措施。 因此,PID智能控制器本质上是一个具有A/D、D/A的计算机系统,为了减少体积便于使用,大部分PID智能控制器都选用单片机来制造,主要是选择单片机的内部RAM和ROM的容量和I/O口的数量。MCS-51系统单片机中的AT89C52有256个字节的内部RAM和8K字节Flash ROM,并且可以通过I/O扩展技术,扩展外接RAM和ROM,增加单片机的数据存储能力和程序存储能力,是制造PID智能控制器的理想的单片机。

68
PID智能控制器的设计 在PID智能控制器中,如何实现PID控制是关键。一般情况下可应用增量式PID控制算法进行控制,系统结构见图13.14所示。

69
13.2 PID智能控制器的设计 增量式PID控制算法的表达式如下: Δu(k)=u(k)-u(k-1)
=Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)] 式中k为采样序号,取0,1,2,…,e(k)为第k次采样的偏差值,e(k-1)为第k-1次采样的偏差值,u(k)为PID控制器第K次输出值,Kp、Ki、Kd分别为比例、积分、微分系数,Δu(k)为第k次相对于第k-1次的控制量的增量,所以上式称为增量式PID控制算法。增量式PID控制算法在控制过程中,每次输出的控制值只是控制的增量,执行器每次的变化量较小,使被控对象的参数变化缓慢,控制系统相对稳定。它的算法程序见图13.15。
-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)] 式中k为采样序号,取0,1,2,…,e(k)为第k次采样的偏差值,e(k-1)为第k-1次采样的偏差值,u(k)为PID控制器第K次输出值,Kp、Ki、Kd分别为比例、积分、微分系数,Δu(k)为第k次相对于第k-1次的控制量的增量,所以上式称为增量式PID控制算法。增量式PID控制算法在控制过程中,每次输出的控制值只是控制的增量,执行器每次的变化量较小,使被控对象的参数变化缓慢,控制系统相对稳定。它的算法程序见图13.15。")
70
13.2 PID智能控制器的设计 开始 采样r(K)、c(K)值 计算e(K)=r(K)-c(K)的差值
计算Δe(K)=e(K)-e(K-1)的增量 计算Δu(K)=Kp.Δe(K)+Ki.e(K) +Kd.[ Δe(K)-Δe(K-1)]的控制增量 开始 输出控制增量Δu(K)
=e(K)-e(K-1)的增量. 计算Δu(K)=Kp.Δe(K)+Ki.e(K) +Kd.[ Δe(K)-Δe(K-1)]的控制增量. 开始. 输出控制增量Δu(K)")
71
PID智能控制器的设计 除了增量式PID控制算法,还有微分先行PID控制算法等多种控制算法。在确定了—种控制算法编写好相应的程序,在进入实际应用前,还需要对Kp、Ki、Kd和采样时间T进行确定。因为大多数工业被控对象的特性即被控对象的数学模型难以建立,加上执行器、检测装置等环节的特性的影响,使得Kp、Ki、Kd和采样时间T必须在实践中确定。一般来说,采样时间按经验选取,表13.2给出了—些常用被控参数的经验采样时间。 被控参数 采样时间S 说明 流量 1-5 推荐使用1-2S 压力 3-10 推荐使用6-8S 液位 6-8 成分 15-20 温度 或使用纯滞后

72
PID智能控制器的设计 随着单片机硬件性能的提高,缩短采样时间成为可能,有利于提高控制精度,使数字控制系统更接近连续的模拟控制系统。而Kp、Ki、Kd参数的选择在工业应用中主要采用实验法来确定,根据一些基本试验数据,由经验公式导出Kp、Ki、Kd的参数,常用的方法有扩充临界比例法和扩充响应曲线法。在确定了Kp、Ki、Kd的参数值,通过实际使用,有时候还需要作修正,最终使控制系统运行在最佳状态,获得最好的控制效果。

73
13.2 PID智能控制器的设计 4).PID智能温度控制器
热敏电阻 温度控制对象 加热器 热敏电阻变送电路 V/F转换 键盘 单 片 机 显 示 器 可控硅交流 调压器

74
PID智能控制器的设计 被控对象是一烤炉,热敏电阻为温度传感器,通过变送电路把温度信号变换成电压值,再由LM331电路经过V/F转换成频率值输入单片机,显示器显示各种需要的信息,键盘用于控制器的操作和Kp、Ki、Kd参数的设定。比较器和PID控制器由单片机程序构成,PID控制器输出的控制量变换成由P3.5输出的脉冲宽度可调的脉冲信号,去控制可控硅导通时间的多少来控制执行器(电加热器)的热量,达到控制烤炉温度的目的。图13.17是PID智能温度控制器的电原理图。
的热量,达到控制烤炉温度的目的。图13.17是PID智能温度控制器的电原理图。")
75
PID智能控制器的设计 在图13.17中,温度测量、A/D变换、单片机和显示部分与图13.2基本相同,热敏电阻为温度传感器,经过三点式线性校正、运算放大器放大转换成—定的电压后由LM331把频率信号输入单片机进行处理。因为是交流供电,所以显示部分采用LED数码管,显示亮度好。图中CD4513是BCD码七段译码、锁存、驱动器,是LED数码管的专用器件,是静态控制的器件,它的显示方式和控制与CD4543有相似之处。P1.0 - P1.3输出四位二进制的值加到CD4513的输入口,通过CD4513进行译码后,由LED数码管予以显示。CPU的P1.4 - P1.7用于对三片CD4513的片选控制。CPU的P1.7用于表示显示的数的含义。当P1.7=1时,发光二极管D2导通、发光,表示LED显示的值是温度测量值。当P1.7=0时,发光二极管D1导通、发光,表示LED显示的值是设定温度值,这样可以用一组三位LED来显示不同的内容。个位LED的小数点位通过一个电阻接电源,使小数点常亮,使LED三位为二位整数,一位小数。

76
PID智能控制器的设计 单片机CPU作为智能调节器,在内部有PID调节程序,根据设定温度值和测量的温度值进行比较,对比较值进行数字PID运算,得到一个控制值,这个控制值从CPU的T1端(15脚)输出,采用脉宽调制的方式输出0、1信号,控制带光电隔离的可控硅触发器MOC3063去控制TLC336A双向可控硅,调节电加热器负载上的220V的电压值,实现无级调压精细控制,提高温度控制质量 在控制过程中,需要对被控的温度值进行设定,对设定值进行增加/减少的操作,需要对Kp、Ki、Kd参数进行整定。为此,采用软件与硬件结合的方法来实现。利用CPU的P3.0 - P3.3口的四个端口,设计成简单的键盘输入形式。 在图13.17中,共有K1~K4四个按键。同时四个键断开,控制系统正常工作,LED数码管显示测量的温度值,D2发光管灯亮。
输出,采用脉宽调制的方式输出0、1信号,控制带光电隔离的可控硅触发器MOC3063去控制TLC336A双向可控硅,调节电加热器负载上的220V的电压值,实现无级调压精细控制,提高温度控制质量. 在控制过程中,需要对被控的温度值进行设定,对设定值进行增加/减少的操作,需要对Kp、Ki、Kd参数进行整定。为此,采用软件与硬件结合的方法来实现。利用CPU的P3.0 - P3.3口的四个端口,设计成简单的键盘输入形式。 在图13.17中,共有K1~K4四个按键。同时四个键断开,控制系统正常工作,LED数码管显示测量的温度值,D2发光管灯亮。")
77
13.2 PID智能控制器的设计 当K1按下时,使P1.7=0,D1灯亮,表示LED显示的为设定温度值。
在K1按下的同时,按K2键,使设定温度值加1,按一次加1℃。 在K1按下的同时,按K3键,使设定温度值减1,按一次减1℃。由此完成了温度设定的过程。当K4按下时,使P1.7为0状态,D1、D2灯轮流闪亮表示进入PID参数设定。

78
13.2 PID智能控制器的设计 在K4按下的同时, 按K1键,改变比例Kp的值 按K2键,改变积分Ki的值 按K3键,改变微分Kd的值
在本电路中,使用P3.0~P3.3端口,采用硬件与软件相结合的原理,实现了复合键的功能。整个硬件电路结构简单,外围电路极少,单片机CPU的基本I/O口得到了充分利用。 由上分析可知,烤炉的PID智能温度控制器与一般的单片机应用区别不大,关键在于PID控制软件的设计和Kp、Ki、Kd参数的整定,关键在于对电加热器的接口电路设计和控制方案的选定。

79
13.2 PID智能控制器的设计 日 CD4513 A B C D LE LM331 ~220V R11 10K D1设定值 负载
14 18 19 8 5 3 2 4 LM331 1,6 7 A - + CD4513 A B C D LE 日 7(a~g) Vc P1.0~P1.3 1 6 15 9 10 11 12 13 R1 Rt R2 R3 R5 R4 Rb 100K W1 C1 0.1μF C3 R8 100K R10 22K R9 47K W2 +Vc -Vc ~220V K1 K2 K3 K4 22μF 500Ω 100Ω 负载 RLC336A MOC3036 20P 12MHz 20P R11 10K 6.8KΩ R7 0.01μF C2 Rs D1设定值 D2测量值 13.2 PID智能控制器的设计
 Vc. P1.0~P R1. Rt. R2. R3. R5. R4. Rb 100K. W1. C1. 0.1μF. C3. R8. 100K. R10. 22K. R9. 47K. W2. +Vc. -Vc. ~220V. K1. K2. K3. K4. 22μF. 500Ω. 100Ω. 负载. RLC336A. MOC P 12MHz 20P. R11. 10K. 6.8KΩ. R μF. C2. Rs. D1设定值. D2测量值 PID智能控制器的设计.")
80
单片机数字万用表的设计 1. 万用表的工作原理 我们通常使用的万用表,是指可以测量各档直流/交流电压、电阻、电参数的测量仪表。一般均采用磁电系仪表来构成万用表。在一块马蹄形的永久磁钢空隙中间有一个可以旋转的框架式的线圈,当有电流流过线圈时,载流导体在磁场中受力的大小与磁场感应强度、电流大小及载流导体有效切割磁力线的长度成正比。即:F=BIWL

81
13.3 单片机数字万用表的设计 式中B为永久磁钢的空气隙中均匀的磁场强度;I为流过线圈的电流,W为线圈的匝数,L为切割磁力线的有效长度。
单片机数字万用表的设计 式中B为永久磁钢的空气隙中均匀的磁场强度;I为流过线圈的电流,W为线圈的匝数,L为切割磁力线的有效长度。 其中磁场强度B,线圈匝数W,有效长度L均为常量。因此,线圈偏转的角度仅与流过线圈的电流成正比。即:a=s*I 式中α为线圈偏转角度,I为流过线圈的电流,S为一常数,表明该仪表的灵敏度。

82
13.3 单片机数字万用表的设计 当我们测量电压,电流,电阻时,都会在线圈两端加上某一电压值,从而在线圈中流过一定的电流,引起线圈的旋转,用线圈的旋转角的大小来表示测量值的大小,这就是万用表测量的原理。 图13.18是万用表测量电阻的原理图。

83
单片机数字万用表的设计 图中Rg是万用表表头(线圈)内阻,R为限流电流,a,b端接入被测量的电阻Rx,E工作电源。当Rx接入,流过线圈的电流 I=e/(R1+R+R2),其中E、Rg、R为固定所以 I=K*R2 ,
,其中E、Rg、R为固定所以 I=K*R2 , .")
84
单片机数字万用表的设计 其中K是与Rg、R、E有关的系数,反映了万用表的灵敏度。流过线圈电流与外接被测电阻Rx成比例关系,可以从电流的大小读取Rx的值。由于Rx的值的范围很大,为了能够用一个电流表头测量各种规格的未知电阻Rx,可以增加一个量程开关S和分流电阻R1、R2、R3,分别表示量程的一倍、十倍和百倍。当阻值不同的被测电阻接入到a,b端时,可以通过开关S选择不同的分流电阻,在恰当的量程范围内进行测量,以保证测量值的精度。 同样,利用这个电流表,应用欧姻定律,可以设计出测量电压、电流等电量参数,利用开关S和分压电阻测量不同范围的电压电流值。

85
13.3 单片机数字万用表的设计 2. 单片机数字万用表的工作原理
单片机数字万用表的设计 2. 单片机数字万用表的工作原理 在普通万用表中,利用电流大小改变线圈的旋转来测量,仪表中有大量的机械装置,易受震动,精度差,反应时间慢。而用单片机来制作万用表,可以实现数字化显示并且没有机械转动装置,耐震动,测量精度高,而且具有智能化功能。 图13.19是单片机数字万用表的原理框图。

86
单片机数字万用表的设计

87
单片机数字万用表的设计 在图中,Rx表示待测量的电阻,电阻变换器完成将被测电阻转换成能够被单片机接受的数字量的工作,Vx表示待测量的直流电压,直流电压变换器完成将直流电压转换成能够被单片机接受的数字量的工作,Ux表示侍测量的交流电压,交流电压变换器完成将交流电压转换成能够被单片机接受的数字量的工作。被测的电参数统一转换成数字量后,通过转换开关S,把待测量的参数输入单片机,由单片机CPU进行数据处理,并在显示器加以显示,功能键用于智能化操作用。

88
单片机数字万用表的设计 因此,从原理上讲,单片机数字万用表就是一个单片机测量电路,不论是测电阻值还是测电压值,通过变换电路都转换成数字量,单片机通过S量程转换开关能够判别输入量的性质并进行信号的处理。由于使用了单片机,对输入量可以进行智能化判断,自动扩展量程,只要信号处理电路设计合理,采用12位或16位的A/D转换器,可以达到很高的测量精度。

89
13.3 单片机数字万用表的设计 3. 单片机数字万用表的设计
单片机数字万用表的设计 3. 单片机数字万用表的设计 由于单片机有智能化功能,除了测量电阻、电压、电流等参数外,还可以测量频率,脉冲信号和电压的波形。 单片机数字万用表有测量电路,A/D转换电路,显示电路,单片机CPU,键盘五个部分。 l)测量电路 电阻:电阻测量的基本原理见图13.20 在图中,Rx为被测电阻,R是固定电阻,E是工作电压。 输出电压,其中R、E均为已知的固定值。则V正比于Rx。测量输出电压V值,可以计算出被测电阻的值。
测量电路. 电阻:电阻测量的基本原理见图 在图中,Rx为被测电阻,R是固定电阻,E是工作电压。 输出电压,其中R、E均为已知的固定值。则V正比于Rx。测量输出电压V值,可以计算出被测电阻的值。")
90
单片机数字万用表的设计

91
单片机数字万用表的设计 为了能测量出0-20MΩ的常规电阻值,当E=5V时,需要配合不同的电阻R,来保证Rx的测量精度。为了减少测量误差,本设计中没有用运算放大器放大电压,通过开关选择不同的电阻使输电压尽量在0-5V范围内变化。 在该图中,我们以测量Rx=1-100K 进行分析。 令E=5V,取R=10k,则输出电压

92
13.3 单片机数字万用表的设计 V100K-V1K=4.5454V-0.4545V=4.0909V
单片机数字万用表的设计 V100K-V1K=4.5454V V=4.0909V 16位A/D总线共65536位,1K-100K其间为100K。 100K/65536=1.53Ω/位,即每个A/D转换的数字量相当于1.53Ω。 一般电阻精度为2%-5%,以2%计算,1KΩ的误差为20Ω左右,100KΩ误差为2KΩ左右,精度电阻精度为1‰,1KΩ的误差为2Ω。而16位A/D总路线的转换误差仅1.53Ω,完全能达到这个要求。

93
单片机数字万用表的设计

94
电子血压计的设计 1. 血压形成原理 血压是指血管内的血液对于单位面积血管管壁的侧压力,也即压强,通常以毫米汞柱(mmHg)为单位,1mmHg相当于133Pa,或0.133kPa。血压的形成,首先是由于心血管系统内有血液充盈,心血管系统是一个封闭的管道系统,在这个系统中有足够的血液充盈,这是形成血压的一个前提。心脏在循环系统中起着泵的作用,心室肌收缩时,主动脉压急剧升高,大约在收缩期的中期达到最高值,这时的动脉血压值称为收缩压。心室舒张时,主动脉压下降,在心舒末期动脉血压的最低值,称为舒张压。收缩压和舒张压的差值称为脉搏压,简称脉压。
为单位,1mmHg相当于133Pa,或0.133kPa。血压的形成,首先是由于心血管系统内有血液充盈,心血管系统是一个封闭的管道系统,在这个系统中有足够的血液充盈,这是形成血压的一个前提。心脏在循环系统中起着泵的作用,心室肌收缩时,主动脉压急剧升高,大约在收缩期的中期达到最高值,这时的动脉血压值称为收缩压。心室舒张时,主动脉压下降,在心舒末期动脉血压的最低值,称为舒张压。收缩压和舒张压的差值称为脉搏压,简称脉压。")
95
电子血压计的设计 一般所说的动脉血压是指主动脉压。因为在大动脉中血压降低很小,所以通常将在上臂测得的肱动脉压代表主动脉压。我国健康青年人在安静状态时的收缩压为100~120mmHg,舒张压为60~80mmHg,脉搏压为30~40mmHg,平均动脉压为100mmHg左右。成年人在安静时的收缩压如高于140mmHg ,舒张压持续超过90mmHg,可认为血压高于正常水平。如果舒张压低于50mmHg,收缩压低于90mmHg,则表示血压低于正常水平

96
电子血压计的设计 血压是一项重要的生理指标,在医疗保健中准确地提供血压信息是十分重要的。为了研究和应用的需要,世界卫生保健组织规定了成年人的血压标准如下: 收缩压≤140mmHg,舒张压≤90 mmHg,为正常血压; 收缩压≥160mmHg,舒张压≥95 mmHg,为高血压; 收缩压140~160mmHg,舒张压90~95 mmHg之间,为临界性高血压。

97
13.4 电子血压计的设计 年 龄 男 性 女 性 收缩压 舒张压 11~15 16~20 21~25 26~30 31~35 36~40
电子血压计的设计 年 龄 男 性 女 性 收缩压 舒张压 11~15 16~20 21~25 26~30 31~35 36~40 41~45 46~50 51~55 56~60 61~65 114 115 117 120 124 128 134 137 148 72 73 75 76 80 81 82 84 86 109 110 111 112 116 122 139 145 70 71 74 77 78 79 83

98
电子血压计的设计 2. 血压测量原理 现在已有各种类型的压力换能器,可将压强能的变化转变成电能的变化,并能精确地测量出心动周期中各瞬间的血压数值。在临床上,水银柱血压计是最常用的血压测量仪,是利用柯氏音方法进行判别的。柯氏音法测量人体血压的方法,是目前医学上公认的传统的测量方法。

99
电子血压计的设计 该测量法是在手腕上部卷绕Riva—Rocci的腕带,加压后,当腕带的压强上升到约比最高血压高30mmHg时,上手腕的动脉血管中的血液流动将被闭塞,如图13.23所示那样,然后慢慢地按一定的速度减压,则放置在肘窝动脉的听诊器将会测出柯氏音的产生和消失,分别测量其产生和消失时加压气囊内的压强,就作为收缩压(最高血压)和舒张压(最低血压)。由于听诊器的血压测量很普及,故目前仍然是全世界血压测量的标准方法。
和舒张压(最低血压)。由于听诊器的血压测量很普及,故目前仍然是全世界血压测量的标准方法。")
100
电子血压计的设计 3. 电子血压计 电子血压计的测量原理同水银柱血压计一样采用间接测量法,也是利用柯氏音来判别收缩压和舒张压的,用压电陶瓷作为柯氏音的传感器。压电陶瓷传感器是以压电效应为基础的,在某些晶体中,在一定方向受到外力的作用,在内部会产生极化,相应地在晶体的两个表面产生符号相反的电荷。当外力消除时,电荷也消除,而且作用力方向改变,产生电荷的极性也不同。

101
电子血压计的设计 测量血压用的压电陶瓷称为柯氏音传感器,是在一个园形的黄铜簿片上面涂一层压电陶瓷材料烧结而成,其外形如图13.24所示。

102
13.4 电子血压计的设计 柯氏音传感器可以等效为一个以压电材料为电介质的电容器,其电容量为 C=ε0εA/h
电子血压计的设计 柯氏音传感器可以等效为一个以压电材料为电介质的电容器,其电容量为 C=ε0εA/h 式中ε0为真空介质常数,ε为压电材料的相对介电常数,A为压电元件极板面积,h为压电元件的厚度。

103
13.4 电子血压计的设计 它的使用条件如下: 正常工作条件:偏置电压 DC 4.5V~12V 偏置电阻 10~20KΩ 温度 5~40℃
电子血压计的设计 它的使用条件如下: 正常工作条件:偏置电压 DC 4.5V~12V 偏置电阻 ~20KΩ 温度 ~40℃ 湿度 ≤50% 贮存条件: 温度 ~55℃ 湿度 ≤95% 拾取信号频率: 20Hz~200Hz 静态电流 ≤0.5mA 输出电压 80mV±25% (专用测试设备测试) 温度影响 温度变化范围5~40℃
 温度影响 温度变化范围5~40℃")
104
13.4 电子血压计的设计 目前可使用的柯氏音传感器是将压电陶瓷片封装在不锈钢外壳内,直径为ф31mm,厚度为6mm
电子血压计的设计 目前可使用的柯氏音传感器是将压电陶瓷片封装在不锈钢外壳内,直径为ф31mm,厚度为6mm 重量约30克,在测量血压时,用柯氏音传感器代替传统的听诊器,放在听诊器原来测量血压的位置,由柯氏音传感器检测柯氏音,并通过信号处理电路,把柯氏音转换成蜂鸣器的叫声。在放气过程中气压下降到收缩压时有柯氏音产生并发出第一声蜂鸣声,直到气压下降到舒张压附近,柯氏音逐渐变低直至消失,蜂鸣声也消失。因此蜂鸣器的第一声对应的压力和蜂鸣器最后声音对应的压力就是血压的收缩压和舒张压。这是电子血压计测量的基本原理。

105
电子血压计的设计 通过大量的测试、记录、对比,柯氏音的信号波形图都有一个明显的特征:在有柯氏音产生的同时,波形产生了变化,并且有明显的特征,见图13.25所示。

106
电子血压计的设计 图中,A—T为全过程的波形,A波为袖带压力高于收缩压血液被完全阻断的情形,B波为袖带压力刚刚低于收缩压,血液在心脏的射血作用下,第一次冲过阻碍而通过压迫区时的情形,S波为袖带压力刚刚降至舒张压时,血液即将完全畅通时的情形,血液从部分畅通到完全畅通期间,袖带内空气压力除了随时间而不断下降外,还由于心脏的收缩、舒张作用,使传感器输出的波形发生了突变。在B~G之间,随着血液量的增大,冲击作用变大,产生了幅值很大的尖脉冲,而到达R,S波时,由于血流渐趋畅通,心脏的收缩、舒张叠加作用变弱,波形上只有较小的尖脉冲产生。正是由于这些尖脉冲的作用,才使电子血压计能接收到柯氏音信号,并随之产生与心脏跳动几乎同步的鸣叫来代替原来的医用听诊器,达到电子测量血压的目的。

107
13.4 电子血压计的设计 Kortkoff将测量血压期间的声音变化分为: 第Ⅰ时相:袖带压力下降中听到的第一次轻而清晰的敲击声
电子血压计的设计 Kortkoff将测量血压期间的声音变化分为: 第Ⅰ时相:袖带压力下降中听到的第一次轻而清晰的敲击声 第Ⅱ时相:随着夜里的下降,声音变大,成为较响钝浊声 第Ⅲ时相:声音变的更响出现清脆的抨击声 第Ⅳ时相:声音突然变小,短促而低沉 第Ⅴ时相:随着袖带压力下降,声音最终消失 由此可见,测量血压期间柯氏音从响到更强再转弱乃至消失,而相对应的波形图中的尖脉冲信号幅度也是从有至更大再变小乃至消失。说明图13.25较整地反映柯氏音变化的全过程。

108
电子血压计的设计 电子血压计的柯氏音测量电路框图如图13.26所示。 柯氏音传感器 扬声器

109
电子血压计的设计 图中,柯氏音传感器代替传统的听诊器放在腕带下,检测到的柯氏音由信号放大电路进行处理,把柯氏音在扬声器中表达出来。在鉴听扬声器发出的柯氏音的同时,从水银柱上观察压力的变化,得到血压的收缩压和舒张压的值。由于在测量过程中,柯氏音的鉴别是由电子电路来完成的,这样就为个人自己测量血压成为可能。

110
电子血压计的设计 在上面介绍的电子血压计中,虽然应用了电子技术,但血压测量是一个很复杂的过程。因为血压测量的对象千差万别,人的健康情况各不相同,在测量过程中还有许多干扰,为了进一步提高测量精度和方便血压测量,用单片机设计电子血压测量仪,具有智能判别功能,可以进一步提供测量的方便性。单片机电子血压计的结构框图如图13.28所示。

111
电子血压计的设计

112
电子血压计的设计 4. 单片机电子血压计的设计 在图13.28中,柯氏音传感器检测血压的柯氏声音,通过柯氏音放大电路把柯氏音转换成相应的脉冲信号输入单片机。压力传感器检测气囊内的压强,通过压力放大器把气囊内的压强放大并转换成数字信号输入到单片机中。在单片机内部,一边计量气囊内的压强,一边检测柯氏音的脉冲信号,在第一个脉冲到来的时候记录下此时气囊内的压强,作为收缩压,在检测到脉冲消失时记录下气囊内的压强,作为舒张压。

113
电子血压计的设计 根据柯氏音的脉冲频率可以计算出心脏跳动的频率,即心率。然后单片机通过输出接口在液晶显示器上显示血压的收缩压、舒张压和心率的测量结果。柯氏音传感器的放大电路如上面电路所示,压力传感器可以采用硅压阻式压力传感器,最好选用有温度补偿型的,可以提高测量精度。

114
电子血压计的设计 血压的测量范围是0 – 200mmHg之间,压力传感器一般选用表压式硅压力传感器。我们推荐使用MPX5050型压力传感器,是全集成温度补偿、放大输出型压力传感器,可以直接与单片机接口相连,它的性能如下: 温度补偿范围:-40 – +120℃ 压力测量范围:0 – 50Kpa(0 – 375mmHg) 供电电压: 5V(4.75 – 5.25V) 满量程输出: 4.5V 零位偏差电压:0.2V 灵敏度: mV/KPa
 供电电压: 5V(4.75 – 5.25V) 满量程输出: 4.5V. 零位偏差电压:0.2V. 灵敏度: 90mV/KPa.")
115
电子血压计的设计 从上可知,MPX5050型硅压力传感器是比较合适的压力传感器,它内部有温度补偿和放大器,提高了集成度和稳定性,使用也十分方便,压力的输出电压可以直接通过A/D转换器把数字量传送到单片机。 单片机可以选择MCS-51类CPU,也可以选择其它类型的单片机。主要是根据单片机的RAM、R0M的容量,单片机的I/0口的数量而定。由于血压计显示的内容比较多,一般都根据产品的要求设计显示的字符、显示的位置,所以液晶显示器是需要定制的。

116
电子血压计的设计 在单片机电子血压计的软件设计中,除了要处理好柯氏音传感器和压力传感器的数据采集外,重要的是对收缩压和舒张压的判别。实践证明,电子血压计在测量时,收缩压相对来说误差比较小,但舒张压的误差比较大。因为在测量过程中,柯氏音逐渐变轻直至消失,传感器检测到的柯氏音有误差,对确定舒张压带来困难,而且不同的人产生的柯氏音强弱也有差异,在编写软件时很难能够较好地解决这个问题,这也是目前电子血压计存在测量误差的主要原因之一。

117
13.4 电子血压计的设计 单片机电子血压计中的操作按钮用于测量的参数选择和设备检查,其设计原理与智能化仪表的键盘设计方法相类似。
电子血压计的设计 单片机电子血压计中的操作按钮用于测量的参数选择和设备检查,其设计原理与智能化仪表的键盘设计方法相类似。 电子血压计的设计,从本质上讲,是单片机在测量中的应用,由于测量的对象不同,参数要求特别,并且在设计硬件和软件时,要涉及到医学方面的特殊知识,给设计带来了困难,这也正是单片机应用的特别之处。

118
步进电机在精确走步中的应用 步进电机又称脉冲电动机,在计算机外围设备和生产过程控制中有着广泛的应用,是机电一体产品中的重要执行装置之一,是数字控制系统中的一个重要执行机构。应用单片机技术实现对步进电机的控制,可以实现速度、角度、位移等精确的控制。

119
步进电机在精确走步中的应用 步进电机有电磁式步进电机、永磁式步进电机和反应式步进电机。电磁式步进电机一般只有一个绕组,靠电磁作用和相应的机械部件才能产生步进动作。永磁式和反应式步进电机利用转子和定子之间的电磁作用产生步进动作。

120
步进电机在精确走步中的应用 由于定子和转子之间没有机械的联系,这种电机有良好的快速性和可靠性,所以工业上大量用作伺服、状态指示、功率拖动,位置、速度控制的场合均应用这一类步进电机。特别是反应式步进电机,有力矩/惯性比高、步进频率高、频率响应块、不通电时可以自由转动,可以正反向旋转,而且它们的结构简单,工作命长,在单片机应用中得到了广泛的使用。

121
步进电机在精确走步中的应用 反应式步进电机是利用磁阻转矩使转子转动的。图13.30所示为一台三相反应式步进电机的工作原理图。它的定子上有六个极,每个极上有绕组,每二个对称的极形成一个控制绕组,从而产生了A、B、C相绕组。正因为有这三相绕组的存在,才使步进电机产生起动力矩。步进电机转子由软磁性材料组成四个分布均匀的齿。反应式步进电机的绕组通常由单极性脉冲供电。当三相 绕组中某一相通电时,产生磁场力,使转子的齿与该相绕组的极对齐,而其它的转子上的齿就不会与定子上的极对齐,产生错齿,正是这种错齿现象实现了步进电机旋转的动力。

122
步进电机在精确走步中的应用 A B C B' C' 1 2 4 3 A' (a) (b) (c)
 (b) (c)")
123
步进电机在精确走步中的应用 在上图中,AA’、BB’、CC’为A、B、C相绕组,A-A’、B-B’、C-C’为定子上的六个极, 为转子上的四个齿。当A相控制绕组通电时,因磁通要沿着磁阻量小的路经闭合,将使转子齿1、3和定子极A、A’对齐,如图所示。当A相失电,B相控制绕组通电时,由于同样的原理,将使转子齿2、4与定子极B、B’对齐,使转子产生了一个旋转的动作。

124
步进电机在精确走步中的应用 同样,B相失电,C相控制绕组通电时,同样使转子1、3与定子极C、C’对齐。如此重复循环,使A-B-C三相控制绕组顺序通电,电机的转子使按逆时针方向旋转。如果改变三相控制绕组的通电顺序,改为C-B-A顺序通电,那么步进电机的转子便按顺时针方向旋转,从而达到利用脉冲电压信号来控制步进电机的正转与反转的控制效果。上面的通电方式称为三相单三拍工作方式,即有三相控制绕组,每三次切换完成一个通电状态的循环,步进电机每旋转一次,产生30度的旋转。

125
步进电机在精确走步中的应用 当三相控制绕组的通电顺序为A-AB-B-BC-C-CA时,即先使A相控制绕组通电,然后使A、B相控制绕组通电,再让B通电,依次进行,定子的三相控制绕组经过六次切换电的导通状态完成一个循环,称为六拍。在这种控制方式下,当A相控制绕组通电时,转子齿的1、3与定子的极A、A’对齐,当B亦通电时,转子的齿2、4在定子的极B、B’作用下,并产生了旋转,结果在A、B相控制绕组的共作用下,使转子的齿1、3和2、4处于定子的极A、B和A’、B’之间,旋转角度为15度。由此可见,同一台步进电机,在不同的通电方式下,转子旋转的角度亦不同。

126
步进电机在精确走步中的应用 因此,当增加步进电机的定子的极数和转子的齿数,配合以适当的相控制绕组通电方式,可以获得更小的旋转角度,获得更精确的控制。 所以,利用单片机的输出端口,输出脉冲开关量加到步进电机的控制线圈A、B、C上,用软件的方法控制A、B、C加电的顺序,使步进电机得到良好的控制。

127
步进电机在精确走步中的应用 步进电机的定位控制精度、动态响应与电机本身的结构有关,也与对步进电机的控制驱动方式、工作电流波形有关。在实际应用中,需要对控制信号进行放大,具有改善电流波形、续流能力和供电方式的改变,才能更好地控制步进电机实现较好的控制效果。

128
步进电机在精确走步中的应用 单电压功率控制电路如图13.31所示,图中Vc是步进电机的供电电源。由于步进电机是一个感性负载,L为某相控制绕组线圈,RL为线圈的电阻,Rc是外接电阻,D是续流二极管,T是开关管,当输入电压Vin=0时,T截止,线圈L中无电流流过,当Vin=1时,T饱和,L上有电流流过,若Vin从1→0时,流过线圈L的电流发生很大的变化,从而在L上产生一个大的反电势,很容易将开关管T击穿,而续流二极管D使得产生的反电势有一个通路,从而保护了开关管。 电阻Rc是一个限流电阻,保证通过线圈L的电流在正常工作范围,同时,也起到改善回路的时间常数。因为回路的时间常数为L/(RL+RC),而RL为线圈的电阻值,是固定不变的,所以适当改变RC的值,可以改善步进电机的频率性能。 L Vc R C D T Vin
,而RL为线圈的电阻值,是固定不变的,所以适当改变RC的值,可以改善步进电机的频率性能。 L. Vc. R. C. D. T. Vin.")
129
13.5 步进电机在精确走步中的应用 步进电机的精密走步控制
步进电机在精确走步中的应用 步进电机的精密走步控制 在计算机的软盘驱动器和打印机应用中,需要进行精密的走步控制,电路图如图13.32所示。 图中AT89C52为单片机,G为一个四相200极的步进电机。在进行走步控制时,89C52的P1.4输出一个1电平,使三极管Q6导通,并使三极管Q5导通。35V高压通过Q5加到步进电机G的四组绕组的公共端,由于电压反向偏置,使二极管D5截止,+5V不能通过D5加到线圈上,与此同时,89C52的P1.0-P1.3根据控制的要求,由软件分别置1,通过限流电阻R1-R4,使功率驱动管Q1-Q4对信号进行功率放大,使步进电机的四相控制绕组通过电流,产生驱动力,使步进电机转子旋转,改变程序可以达到控制步进电机转子的不同旋转。

130
13.5 步进电机在精确走步中的应用 G AT89C52 P1.4 P1.0 P1.1 P1.2 P1.3 R1 R2 R3 R4 R5
步进电机在精确走步中的应用 P1.4 P1.0 P1.1 P1.2 P1.3 AT89C52 R1 R2 R3 R4 R5 R6 R7 D1 D2 D3 D4 D5 Q1 Q2 Q3 Q5 LA LB LC LD G +5V +35V

131
步进电机在精确走步中的应用 为了使步进电机旋转位置准确,不但需要电机转动时要施加电压,在电机不旋转时也需要在绕组上施加一个电压,以保证步进电机转轴不移位。如果加在绕组上电压固定不变,那么电机不旋转时,加上的电压过高,电流就大,时间长了会烧坏电机,所以在控制电路中加了一个5V电源。当需要旋转时,通过35V加在绕组上,产生大的电流。当不需要旋转时,P1.4为0电平,Q5截止,导致Q6截止,35V无法加上,D1为正向偏置,5V电压通过R5、D5加到绕组上,形成一个维持力,使步进电机的转子保持原来的控制位置。

132
步进电机在精确走步中的应用 所以,该电路使步进电机采用高压驱动,低压锁定的方式工作。利用这个电路对步进电机进行控制,可以实现精确的走步控制,或实现精确的旋转控制。如果步进电机的转轴直径为10mm,那么轴的周长是31.4mm,四相200极的最小步距应当在1度左右,那么每走一步,或旋转一次,仅位移0.087mm,或偏转1度,这种控制已广泛应用于计算机的软驱磁头位移驱动,打印机的打印头打字控制,也可以应用于机械手动作或精密的角度、位移控制场合。

133
步进电机在精确走步中的应用 在制造机器人的过程中,机器人的手、脚、头等所有活动部位都有位移的动作,所以在机器人内部也有大量的步进电机精确走步的应用,步进电机是自动化系统中的一个重要执行装置,与单片机结合在一起,实现机一电一体化,可以发挥极大的作用。

134
13.6 单片机在串行通信中的应用 1.串行Flash存储器和EEPR0M的应用
单片机串行通信在控制、测量、信息传送和接口电路方面有广泛的应用,下面介绍单片机串行通信在这几方面的应用,为读者拓宽应用视野。 1.串行Flash存储器和EEPR0M的应用 在单片机应用系统中,需要存储大量的数据,并且在断电后仍然能保持,一般的RAM无法适应,而Flash存储器(闪烁存储器)存储容量大、电擦写和失电可保持的特点,EEPROM也是一种电擦写和失电可保持的存储器,这类存储器正在被大量使用。
存储容量大、电擦写和失电可保持的特点,EEPROM也是一种电擦写和失电可保持的存储器,这类存储器正在被大量使用。")
135
13.6 单片机在串行通信中的应用 目前单片机逐步采用串行的接口芯片,而且Flash存储器和EEPR0M有并行和串行几种类型,因此串行Flash存储器和EEPR0M在单片机系统中的应用中很受欢迎。 以典型的串行Flash存储器NM29A040/080为例,介绍它们的应用。NM29A040的容量为4Mbit,NM29A080的容量为8Mbit,5V电源供电,可反复电擦写10万次。图13.33是串行Flash存储器NM29A040/080的引脚图

136
13.6 单片机在串行通信中的应用

137
13.6 单片机在串行通信中的应用 图中,l、28脚为电源,CS为片选,CS=0有效,所以可以利用片选信号使用多片NM29A040/080,当只有一片NM29A040/080时,该引脚应直接接地。SK是串行数据时钟,用于对数据传送的速率进行同步,在每一个SK周期,有一位数据输入或移出。DI是串行数据输入,用于输入命令和数据,在SK上升沿被锁存。DO是串行数据输出,用于输出工作状态和数据,在SK下降沿改变输出的数据。它的存储区被分成4Kbyte,每块分为16个区,每个区256byte,共8页。所以每个块有128页,每页为一个32byte宽的数据存储器,页是最小的读/写单元,最后的一、二块用于写入系统配置参数,是一次性写入区。

138
13.6 单片机在串行通信中的应用 串行Flash存储器串行Flash存储器NM29A040/080共有l2条操作指令,详见表13.4。
字1 字2 字3 取指状态 80H 设置地址 88H 块地址 页地址 递增 90H 读数据 98H 写数据 A0H 55H 擦写 A8H 数据移入 B0H 要移入数的位数 数据输出 B8H 要移出数的位数 读最后块 D0H 写允许 E0H 写禁止 E8H 写最后块 F0H

139
13.6 单片机在串行通信中的应用 取状态指令用于检查芯片是否忙、写擦操作是否成功、是串行Flash存储器NM29A040/080中的哪一个得状态。递增指令用于页地址的变化,设置地址用于对页地址的操作,读最后块指令用于NM29A040的第127块、NM29A080的第254、255块读操作,写最后块指令用于NM29A040的第127块、NM29A080的第254、255块写操作,但后面要加55H安全码。NM29A040/080与单片机的联接见图13.34。 P1.0 AT P1.1 P1.2 89C52 P1.3 DI N/M DO 29A040/ CS SK

140
13.6 单片机在串行通信中的应用 图中,单片机的P1.2用于NM29A040/080的片选控制,P1.3用于提供NM29A040/080的串行数据时钟,NM29A040/080的D0、DI端可以与单片机的串行口RXD、TXD相连,也可以和单片机的P1.0、P1.1相连,用单片机的P1.0、P1.1口模拟串行口RXD、TXD进行工作。由于串行Flash存储器NM29A040/080的容量大,使用的接口引脚特别少,还可以与PC相连,作为电子存储器用。 对于数据存储容量不大的应用系统可以利用串行EEPROM,体积更小、价格更低。其中X84系列串行EEPROM就是一款理想的器件。串行X84系列EEPROM是美国Xicor公司产品,常用型号的性能见表13.5。

141
13.6 单片机在串行通信中的应用 器 件 容量 (位) 读时间 写周期 页写方式 (字节) 工作电压(V) 传输 速率 擦写 周期
器 件 容量 (位) 读时间 写周期 页写方式 (字节) 工作电压(V) 传输 速率 擦写 周期 X84041 4K 45ns 5ms 8 3.3Mbps 10万次 X84161 16K 25ns 2ms 32 10Mbps 5Mbps 2Mbps X84641 64K 10万 X84128 128K
 读时间. 写周期. 页写方式. (字节) 工作电压(V) 传输. 速率. 擦写. 周期. X K. 45ns. 5ms Mbps. 10万次. X K. 25ns. 2ms Mbps. 5Mbps. 2Mbps. X K. 10万. X K.")
142
13.6 单片机在串行通信中的应用 X84系列器件的容量不同,引脚排列各不相同,但它们有相同的功能引脚:
I/O----数据输入输出端 CE-----片选信号端 OE-----输出使能端 WE-----写入使能端 WP-----写保护输 Vcc----电源正端 Vss----接地端 NC-----空脚 下面以X84041为例说明与单片机的应用。X84041有8脚、14脚两种封装形式,引脚排列见图13.35。

143
13.6 单片机在串行通信中的应用

144
13.6 单片机在串行通信中的应用 CE端低电平有效,在读操作时,发送一个16位地址后串行读取数据,每读取一字节数据后字节地址自动增一。在写操作时,要发送复位操作,向器件发出16个分开的写周期来串行写入地址,写周期可写8字节的数,在写周期之间不允许有读周期。复位操作使X84041复位并设置内部写使能锁存器,在任何时候都能通过执行读、写”0”,读操作可以发出复位命令,这一命令将中止多个读或写周期的操作,只要写”0”周期一完成,X84041便复位。

145
13.6 单片机在串行通信中的应用 X84041与单片机的连接见13.36。

146
13.6 单片机在串行通信中的应用 2.串行A/D转换器在便携式数据采集中的应用
TL2543是TI公司的产品,是12位串行A/D转换器,在MCS-51系列单片机应用中,可以节约大量的I/0端口,简化硬件电路。

147
13.6 单片机在串行通信中的应用 TL2543的特性: 12位分辨率 转换速度10μS 11个模拟量输入通道 3路内置自测方式
有单、双极性输出 它的引脚排列如图13.37,AIN0 – AIN10为10个模拟量输端,CS为芯片片选端,低电平有效,可以通过片选端多片联接,DOUT为A/D转换结果的三态串行输出端,EOC为转换结束端,CLK为I/O时钟,REF+、REF-为基准电压。

148
13.6 单片机在串行通信中的应用 利用多路串行TLC2543芯片与单片机AT89C52可以组成多路模拟量采集系统。如图13.38所示,通过传感器和变送电路得到的11路模拟量信号输入到TLC2543芯片的AIN0 – AIN10端,TLC2543芯片的REF+端接到经过精密稳压的稳压管D。由于TLC2543芯片是串行A/D转换器,TLC2543芯片的15 – 18端与单片机AT89C52的P1.0 – P1.3,完成模拟串行输入功能,仅使用了单片机的四个I/0口。

149
13.6 单片机在串行通信中的应用 输入到单片机AT89C52的模拟量由软件加以处理后通过串行端口输出到MAX232串行接口电路芯片,与PC机串行口相连,这样可以用高级语言在PC机上编程,可以充分利用PC机的资源,对采集的数据进行存贮、打印、制表、显示和远程传送,实现数据的远程测试,使PC机的网络功能得到了充分的应用。

150
13.6 单片机在串行通信中的应用

151
13.6 单片机在串行通信中的应用 在本应用例子中,有三方面的软件。一是将模拟量由TLC2543芯片采集到单片机中,需要定义模拟量的通道编号和数据的位数,产生串行时钟,按时序发送与接收数据位,完成以保证模拟量准确输入单片机;二是在单片机内部要对采集的数据进行滤波、线性化、数值变换的工作,通过单片机的处理从串行口输出到PC机,要对AT89C52对串行口进行设置;三是在PC机内,可以用VB可视化程序设计语言,设计在PC上能够动态显示和存取数据的程序及通过网络远传。因此,这是一个计算机的综合应用例子。

152
13.6 单片机在串行通信中的应用 3.USBN9602的应用 USBN9602芯片是一种专用的USB接口芯片。在USBN9602芯片内,有单片机接口、串行接口、FIF0存储器、电压转换器和时钟信号发生器等,它的内部结构如图13.39。在USBN9602内部的单片机通过接口,传送8位数据和片选、读写控制信号,传送的数据存储在FIF0中,串行接口SIE进行并/串转换,由USB口D+、D-输出到PC机。

153
13.6 单片机在串行通信中的应用

154
13.6 单片机在串行通信中的应用 运用USBN9602芯片可以制造带USB通信接口的智能化数据测量仪。在图中,Rt为热敏电阻,作为测量温度的传感器,与R构成三点式线性校正测量电路,E为测量电路的精密稳压电源,温度的取样电压通过V/F芯片LM331变换成频率信号输入到单片机的T0口,以计数方式采集温度信号,关于单片机对温度信号的数据处理、显示和键盘设计,可参照本章第一节相关内容。

155
13.6 单片机在串行通信中的应用 被处理好的信息由单片机的数据总线D0 – D7传送到USBN9602的数据总线上,对USBN9602的片选地址译码,可以采用线译码方式,也可以用全译码方式产生。输入到USBN9602中的数据由D+、D-端送到USB插座,与PC机相连接,从而把检测到的温度实时信号直接进入了PC机。由此可以看到,利用USB接口芯片可以使单片机的应用范围扩大,方便了单片机应用系统与PC机的串行通信,随着USB接口芯片的普及使用,会有越来越多的单片机应用装置配置USB接口。

156
13.7 单片机在气象参数测量中的应用 1.气象参数测量仪框图
在日常生活中需要了解天气,要进行天气预报,天气预报的前提是测量气象参数,一般气象参数包括温度、湿度、风向、风速、日照强度等,测量气象参数的仪器框图如13.41。

157
13.7 单片机在气象参数测量中的应用

158
13.7 单片机在气象参数测量中的应用 图中有气象参数测量、A/D变换、单片机CPU、气象参数的显示、打印、通信和仪器操作键盘等部分组成。气象参数测量部分使用温度传感器、湿度传感器、风向风速传感器和日照传感器检测到各气象信息,并通过模拟电子电路把检测到的气象参数转换成0 – 5V的电压信号由A/D变换器变换成数字量信号输入单片机CPU,在单片机CPU内的软件进行数据处理后显示、打印、通信,仪器的操作键盘用于人工对该仪器的操作使用。

159
13.7 单片机在气象参数测量中的应用 温度:-10ºC--+50ºC ±0.2ºC 湿度:0--100% ±3%
风向:东,东南,南,西南,西,西北,北,东北八个方位 风速:0--5m/s 2.测量参数 参数测量要求 日照:1--8个等级 参数的测量

160
13.7 单片机在气象参数测量中的应用 温度: 温度测量电路图仍然采用前面所介绍的热敏电阻三点式校正采样电路,选用MF5E系列的R25=10KΩ的热敏电阻。用三点式校正法,计算出校正电阻R,热敏电阻的输出电压输入到V/F芯片LM331,把温度信号转换成频率信号输入CPU。 因为R-10=55.328KΩ R50=3.603KΩ E=5V 所以V-10=4.256V V50=1.357V ΔV=2.899V=2899mV 当LM331设计为1000HZ/1V时,产生的ΔHZ=2899Hz,测量的分辨率为0.021℃/Hz,通过曲线拟合,在单片机内部通过运算可以得到整个测量系统的误差在0.1℃左右,达到测量要求。

161
13.7 单片机在气象参数测量中的应用 湿度: 选用HM1500湿度传感器,该传感器可以直接输电压输出,无须避光,防静电。它的特点是,体积小,不受水浸的影响,高温后恢复迅速,完全互换性,可靠性高,稳定。测量精度高,55%RH时在±2%以内,5V直流供电时, %RH对应输出1-4V直接电压。表13.6是HM1500湿度传感器的特性参数

162
13.7 单片机在气象参数测量中的应用 参数 最小 典型 最大 单位 湿度测量范围 5 99 %RH 测量精度 ±3 ±5 供电电压
4.75 5.25 V 2.42 2.48 2.54 耗电流 0.4 0.8 MA 温度系数(10-50℃) +0.1 %RH/℃ 灵敏度 (35%RH~75%RH) (Δmv/%RH) +25 mV/%RH 恢复时间 (在100%RH下有效15小时后)(T) 10 S 湿度迟滞 ±1.5 长期稳定性 0.5 %RH/Year 响应时间
 %RH/℃ 灵敏度. (35%RH~75%RH) (Δmv/%RH) +25. mV/%RH. 恢复时间. (在100%RH下有效15小时后)(T) 10. S. 湿度迟滞. ±1.5. 长期稳定性 %RH/Year. 响应时间.")
163
13.7 单片机在气象参数测量中的应用 由上可知,HM1500湿度传感器是由电容传感器和振荡电路信号放大电路线性化电路集成一体的传感器,使用极为简单。 表13.6的数据表明,HM1500湿度传感器能够满足的测量范围和精度要求。湿度传感器HM1500的输出信号在1 - 4V。可以直接接入V/F LM331电路产生 HZ的频率信号。 因为 RH=10%时 V10=1.414V F10=1414HZ RH=95%时 V95=3.429V F95=3429HZ 所以,在单片机内部,编写一个计算程序通过T0测量输入的频率信号,就可以求出相对湿度,而且测量精度完全满足要求。由于HM1500湿度传感器在出厂时已标定好,可以直接使用,这样电路的设计和参数校正就非常简单了。

164
13.7 单片机在气象参数测量中的应用 风速: 风速是测量风力的大小,可以自己制造。仿照市场上的风速仪,在风力的作用下,产生旋转,在旋转过程中,利用红外光电管获取脉冲信号,利用单片机测量外部的输入脉冲数就可以得到风速的大小。每旋转一次产生的脉冲数越多,测得的风速越精确。 设计时若使旋转一次产生10个脉冲信号,风速越大,旋转得也越快。单位时间内产生的脉冲信号也越多。因此,可以通过测量单位的脉冲信号多少来计算风速。 自制的风速仪做好后,通过调节电风扇的电压,制造不同的风速环境,将标准的风速仪和它放在一起,记录在不同风速环境下自制风速仪输出的脉冲数,对记录的数值处理后,就可以得到风速/脉冲的关系式,将此关系式编写在程序内,就可以从测得的脉冲数来求得风速。

165
13.7 单片机在气象参数测量中的应用 风向: 我们设计的风向共八个方位,风向标在风力的作用下,会旋转到某一方位而停止住,利用风向标的旋转功能,加装红外光电传感器,就可以测量风向,其自制测量装置示意图如图13.43所示。

166
13.7 单片机在气象参数测量中的应用 如图示,在风向标下面有一个随风向旋转的挡板,挡板成45º扇形。图中D1 – D16为红外发射接收对管,被挡板挡住时,产生一个低电平信号,没有挡住为高电平信号。 设D2、D3被挡住,它们的输出电平V2、V3=0,表示东南风。当风向南变化时,45º的扇形挡板按顺时针方向旋转,D2不再被挡住,V2=1,但挡住了D4,V4=0,但仍在东南方向范围内,单片机仍判定为东南风,当风继续向南变化,挡板顺时针旋转到D3不再被挡住,而D4、D5被挡住,单片机则判定为南风。

167
13.7 单片机在气象参数测量中的应用 所以,利用机械与电子的方法,在D2、D3同时被挡住或有一个被挡住,单片机就认为是东南风区域,显示东南风方向。依次类推,用16个红外发射接收对管,就可以测量八个风向的方位。关于红外发射接收对管的电平信号测量电路,可以参考本书前面章节的内容,这里不再详述。

168
13.7 单片机在气象参数测量中的应用 光照强度: 光照强度是指太阳光的强弱,由于天气的变化,云层的变化,季节的变化,太阳光的强弱会随时变化,一般光的强弱用光照度表示即勒克斯(Lux),在本例中选用光敏电阻作为光照强度的传感器。 光敏电阻的基本参数有光谱、照度、响应、温度特性等。光谱特性反映光敏电阻对于各种波长光的反应灵敏度,不同材料制造的光敏电阻对相同波长的光反应灵敏度不一样,用硫化镉材料制造的光敏电阻的光谱特性与人的视觉特性最接近。照度特性是指在外加一个固定的电压时,光敏电阻的光电流(光电阻)与照度之间的关系,它们之间的关系式为: I=KUαLγ
与照度之间的关系,它们之间的关系式为: I=KUαLγ.")
169
13.7 单片机在气象参数测量中的应用 式中: I------光电流 U------外加电压
L---- -照度 α-----电压指数(1.1 – 1.2) γ----照度指数(0.5 – 1) K------比例常数 α、γ与光敏电阻的材料、尺寸、形状有关。 RG-CdS-A光敏电阻是比较适合的硫化镉光敏电阻,它的特性参数为: 亮电阻----< 50KΩ 暗电阻---.> 100KΩ 峰值波长—520nM 时间常数---< 50mS
 γ----照度指数(0.5 – 1) K------比例常数. α、γ与光敏电阻的材料、尺寸、形状有关。 RG-CdS-A光敏电阻是比较适合的硫化镉光敏电阻,它的特性参数为: 亮电阻----< 50KΩ 暗电阻---.> 100KΩ. 峰值波长—520nM 时间常数---< 50mS.")
170
13.7 单片机在气象参数测量中的应用 测量电路见图13.44。 10V R1 10KΩ R2 3.9KΩ GR 光敏电阻
W1 10KΩ V0 R4 10KΩ R3 24KΩ

171
13.7 单片机在气象参数测量中的应用 光线照到光敏电阻GR上,光线的变化引起光敏电阻阻值的变化,R1、R3为限流电阻,R2与GR并联取得输出电压,W1用于调整输出电压V0的范围和暗光线时的起始电压。V0的电压经过运算放大器处理后变换成0 – 5V电压,再由A/D变换成数字量输入单片机CPU。 图13.45是气象参数测量的电原理图。

172
13.7 单片机在气象参数测量中的应用

173
13.8 单片机在模糊控制中的应用 l. 模糊控制的概念
模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的计算机数字控制技术,是一种相对先进的技术,以类似于人们处理信息的方式来进行信息的处理。传统的数字逻辑需要精确的定义,只能处理类似黑色或白色两种有明显区别特征的事物,而模糊逻辑是一种建立在近似推理概念基础上的近似法,可以处理类似快点、慢点等含糊的概念。

174
13.8 单片机在模糊控制中的应用 模糊控制实质上是一种非线性控制,是单片机在非线性控制领域的应用。基本思想是利用计算机来实现人的控制经验,使采用模糊逻辑控制的系统能进行以往需要依靠熟练的操作工或专家的经验来做的工作,这些经验主要用语言表达的具有相当模糊性的控制规则。

175
13.8 单片机在模糊控制中的应用 模糊控制是一种基于规则的控制,它直接采用语言型控制规则,在系统设计中不需要建立被控对象的数学模型,因而对那些数学模型难以获取、动态特性不易了解的对象特别适用。模糊控制算法是基于启发性的知识和语言决策规则设计的,这有利于模拟人工控制的过程和方法,增加控制系的适应能力,并具有一定的智能能力。模糊控制系统的基本框图如图13.46所示。

176
13.8 单片机在模糊控制中的应用 图中R为设定值,Y为系统的输出,e和c是系统偏差和偏差的微分信号,即模糊控制器的输入信号。

177
13.8 单片机在模糊控制中的应用 2. 模糊推理器 模糊控制系统的核心是模糊推理器,它具有通用性,不同的控制系统可以使用相同的推理器。模糊推理器主要进行模糊控制系统的模糊化、模糊推理和非模糊化操作。模糊控制系统的输入量通过模糊化程序产生模糊输入量,由模糊推理器按推理规则得到模糊输出量,再经过非模糊化处理得到系统的输出。

178
13.8 单片机在模糊控制中的应用 模糊控制系统一般有五个组成部分:
输入部分 - 输入部分是被控对象的参数和控制系统的设定值,通过传感器和相应的输入装置,把模拟量转换成数字量输入计算机。 输出部分 - 模糊推理器输出的是数字量,一般都需要转换成模拟量加到执行器,去改变被控对象的状态。

179
13.8 单片机在模糊控制中的应用 广义对象 - 模糊控制系统的控制对象应包括被控对象、执行器和检测装置、传感器,因为执行器、检测装置、传感器的特性同样影响控制系统的控制性能。 模糊推理器 - 即单片机及相应的程序。 模糊化、非模糊化数据和推理规则 - 指按某一方面的专家的经验得到的程序。

180
13.8 单片机在模糊控制中的应用 模糊控制系统在设计时,首先分析系统的输入量和输出量,并划分为可独立的模型化的各个功能性子系统,标明这些系统的输入输出量,其中有的子系统是可以用常规方法实现的,不必进行模糊控制,其中有的子系统需要模糊化,进行模糊控制。对需要实施模糊控制的子系统,决定它们的输入输出量的范围、模糊子集数目和隶属函数结构。

181
13.8 单片机在模糊控制中的应用 根据对控制系统的操作员、这方面的专家和已有的控制模型,分析描写控制系统的特性知识,使用推理规则把输入模糊变量映射到相关的输出模糊变量上,这些规则应能反应系统的知识库。在写推理规则时,应先书写比较明显的规则,再写不太明显的规则,并进行仿真模拟,对规则进行修改,使控制系统的控制效果更好。

182
13.8 单片机在模糊控制中的应用 4. 一个湿度模糊控制系统的介绍
在许多工业生产过程中,需要对生产过程空间的空气进行湿度的调节。所谓湿度,是指空气中的相对湿度,相对湿度反映了空气中水蒸汽分压力与同温度下饱和水蒸汽分压力之比,用Φ表示,即 Φ=P1/P2·100% (P1为水蒸汽分压力、P2为饱和水蒸汽分压力)
")
183
13.8 单片机在模糊控制中的应用 在湿度控制过程中,会受到温度的影响,当温度的变化时会引起湿度的变化,对湿度控制比较困难,采用模糊控制的方式来控制湿度比其它的控制方式效果更好。模糊湿度控制采用双输入单输出控制方式,其控制方案如图13.47。

184
13.8 单片机在模糊控制中的应用

185
13.8 单片机在模糊控制中的应用 数字量的模糊化: 在这里有湿度偏差值、湿度变化值的模糊化工作。
数字量的模糊化: 在这里有湿度偏差值、湿度变化值的模糊化工作。 湿度偏差值是指控制系统的湿度设定值与实际的测量值之差,一般以设定值的上下限为模糊控制区,如是设定值为56±6%RH,那么在50 – 62%RH范围内,需要将此范围的数值进行模糊化,分成8个模糊状态: PLs 正的湿度偏差大 PMs 正的湿度偏差中 PSs 正的湿度偏差小 P0s 正的湿度偏差零 NOs 负的湿度偏差零 NSs 负的湿度偏差小 NMs 负的湿度偏差中 NLs 负的湿度偏差大 当控制系统的实际湿度测量值高于62%RH或低于50%RH,则全速进行加湿或全速进行干燥的控制,使被控对象的湿度进入50 – 62%RH范围。

186
13.8 单片机在模糊控制中的应用 湿度变化值是指控制系统的湿度实际测量值在单位时间内的变化速率。由于湿度是一个过程变化量,变化比较缓慢,以一个采样时间为单位,将湿度变化值定在±5%RH内作为模糊控制区,分为7个模糊状态: PLsb 正的湿度变化大 PMsb 正的湿度变化中 PSsb 正的湿度变化小 0sb 湿度变化零 NSsb 负的湿度变化小 NMsb 负的湿度变化中 NLsb 负的湿度变化大

187
13.8 单片机在模糊控制中的应用 模糊控制器的输出量模糊化: 一般情况下将模糊控制器的输出分为15个状态,分别对应于加湿器、干燥器、通风机的不同组合工作状态,可以满足湿度的控制了。这15个不同的组合工作状态与执行装置的工作状态如下。

188
13.8 单片机在模糊控制中的应用 其中: -7/-6: 湿度极大,去湿处理,干燥器开大,减少通风量
-7/-6: 湿度极大,去湿处理,干燥器开大,减少通风量 -5/-4: 湿度较大,去湿处理,干燥器开中,中等通风量 -3/-2: 湿度偏大,去湿处理,干燥器开小,适当通风 -1/0: 湿度差值接近零,单通风调节 +1/+2: 湿度偏小,加湿处理,加湿器开小,适当通风 +3/+4/+5: 湿度较干,加湿处理,加湿器开中,加大通风量 +6/+7: 湿度极干燥,加湿处理,加湿器开大,大通风量

189
13.8 单片机在模糊控制中的应用 PLk: 加湿器开大 PMk: 加湿器开中等 PSk: 加湿器开小 Ok: 加湿器关
NSk: 干燥器开小 SMk: 干燥器开中等 NLk: 干燥器开大 另外,还要列出模糊控制器的控制规则,写出模糊关系的矩阵和决策,把矩阵的数据计算出来放入单片机内存的表格中,供控制时调用。

190
13.8 单片机在模糊控制中的应用 单片机作为模糊控制器,在硬件上与一般的测量控制系统没有区别,主要是控制算法与以往的PID或其它的控制算法不同,要把模糊控制的规则编写成软件,要熟悉被控制对象的控制要求、生产工艺和各执行机构的性能,才能编写出实用的模糊控制系统,在此仅作简单的介绍。

191
思考题与习题 1.叙述智能化仪表的设计方法和步骤,举一个例子加以说明。 2.什么是PID控制,常规PID控制与数字PID控制有何区别?
3.为什么要进行逻辑电平设计,如何解决TTL电路与CMOS电路的逻辑电平的转换? 4.叙述电子血压计的工作原理 5.举一个单片机串行通信应用的例子,并叙述其工作原理。 6.模糊控制系统的特点是什么?



















.>")

