Download presentation
1
機件、機構、機械的定義 機件:機械中單獨一件機器零件,稱為機械元件,簡稱「機件」(machine parts)。
剛體之意義:不受外力作用而變形之物體。亦即不論受多大之外力作用,物體內任意兩點間之距離永不改變之物體。即理想剛體。 宇宙中沒有「絕對剛體」,在機構學上吾人皆假設連桿、傳動軸等為「理想剛體」。

2
機件、機構、機械的定義 機構(mechanism):為兩個以上機件之組合體,牽動其一部分必迫使其餘部分按組合性質作可預期之相對運動或限制運動。 1.單位機構:即兩個各別機件彼此配合,雖未達完全機構之要求,卻能發揮預期之效果。
:為兩個以上機件之組合體,牽動其一部分必迫使其餘部分按組合性質作可預期之相對運動或限制運動。 1.單位機構:即兩個各別機件彼此配合,雖未達完全機構之要求,卻能發揮預期之效果。")
3
機件、機構、機械的定義 2.完全機構:機件組成單位機構,數個單位機構合成為大目的之合成機構。如下圖所示之減速機齒輪即為完全機構。

4
機件、機構、機械的定義 機械(machine):是由一個以上的機構組成,除了能傳達力量和運動外,並能將輸入的各種能量變有用的功。
:是由一個以上的機構組成,除了能傳達力量和運動外,並能將輸入的各種能量變有用的功。")
5
機件、機構、機器、機械之關係

6
機件、機構、機器、機械之區別

7
運動傳達的方法 原動件(driver):又稱主動件,係指在一機構中最先接受外界輸入之能源或力量而運動的機件。
從動件(follower):又稱被動件,係指在機構中受原動件推動而產生運動的機件。
:又稱被動件,係指在機構中受原動件推動而產生運動的機件。")
8
運動傳達之方式

10
直接接觸傳動

11
直接接觸傳動

12
間接接觸傳動

13
運動對與運動鏈 對偶(pair):兩機件經組合而互相接觸並產生 相對運動者,亦稱運動對(kinematic pair)或運 動副。可分為低對和高對兩種: 一、低對:兩機件係以面接觸者。 1.滑動對(sliding pair) 兩機件間僅作直線運動者。
:兩機件經組合而互相接觸並產生 相對運動者,亦稱運動對(kinematic pair)或運 動副。可分為低對和高對兩種: 一、低對:兩機件係以面接觸者。 1.滑動對(sliding pair) 兩機件間僅作直線運動者。")
14
2.迴轉對(revolution pair) 兩機件間僅作廻轉運動者。
3.螺旋對(screw pair) 兩機件間同時作直線運動與廻轉運動者。
 兩機件間同時作直線運動與廻轉運動者。")
15
4.球面對(spherical pair) 兩機件以球面接觸,一件靜止,另一件在運動。
 兩機件以球面接觸,一件靜止,另一件在運動。")
16
二、高對:係兩機件間以點或線接觸者。如 滾珠軸 承、滾柱、凸輪、齒輪等。

17
對偶之種類

20
高對與低對之優缺點比較: 低對:低對機件係面與面的摩擦,適用於低轉速,重負荷及耐震動的場合,若輸入同量的能量下,摩擦損失之功與能較高對多,因此自外界加入的能量也需相對增加,其優點則因接觸面較大,若有充足的潤滑油潤滑,由摩擦所發生的尺寸減少之情形較少,機件壽命較長。 高對:高對係點或線之接觸摩擦,在輸入同量的能量下,摩擦損失之功與能較低對為少,但因摩擦使機件之尺寸減少量卻較多,所以壽命較短,較適用於高轉速、震動小或傳動較複雜的運動機構。

21
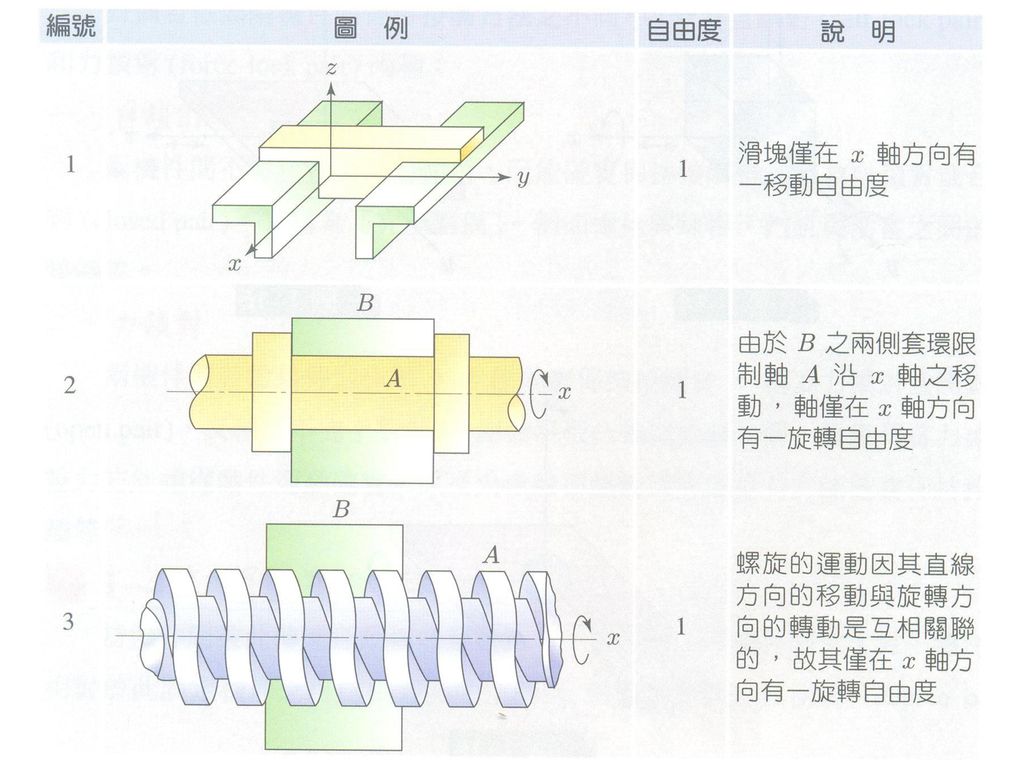
運動對的自由度 自由度:即指明空間某一點的位置,所必須作的最少量度次數稱之;
一個單獨機件存在空間,它具有三個移動自由度(x,y,z),及三個迴轉自由度,一共有六個自由度存在。當和另一機件配連成對偶時,便因約束而損失一個或多個自由度,因此可以說一個對偶最多能有五個自由度,最少也要有一個自由度來做相對運動。
,及三個迴轉自由度,一共有六個自由度存在。當和另一機件配連成對偶時,便因約束而損失一個或多個自由度,因此可以說一個對偶最多能有五個自由度,最少也要有一個自由度來做相對運動。")
22
運動對的自由度

24
運動對之自由度的研判

25
運動對之自由度的研判

26
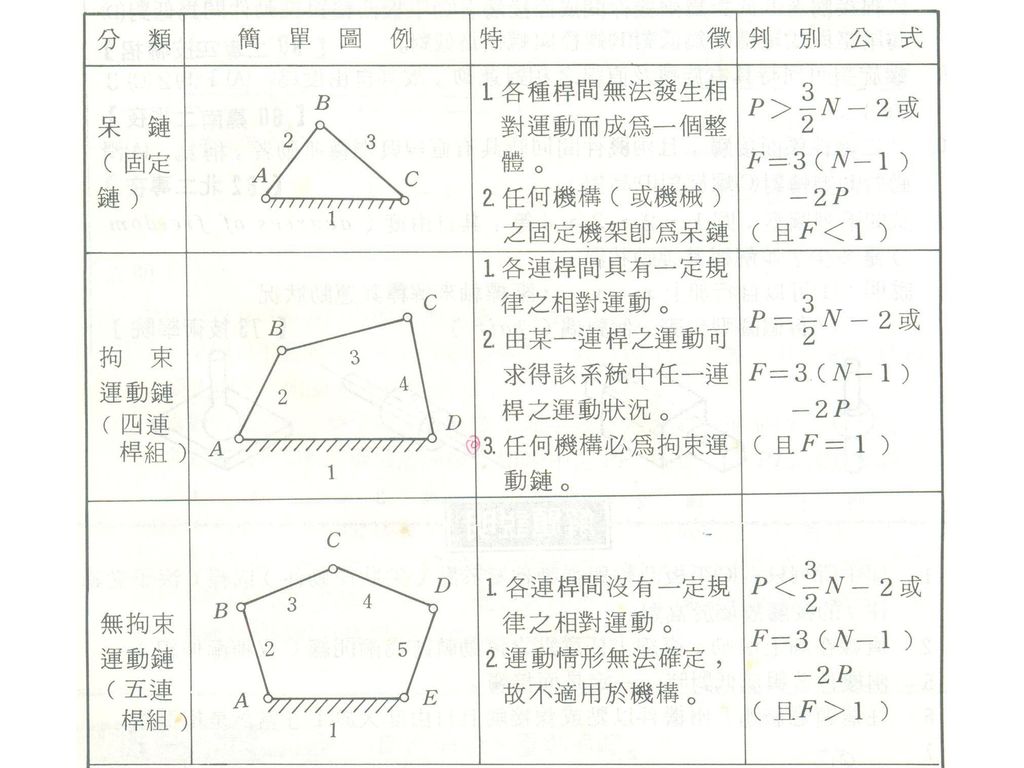
運動鏈的種類

27
運動鏈 一、固定鏈:此一組合之運動鏈各機件間無法產生相對運動,故又稱為呆鏈。

28
運動鏈 一、拘束運動鏈:當其中一連桿運動時,其他機件間能傳達可預期的相對運動,稱為拘束運動鏈。

29
運動鏈 一、無拘束運動鏈:當其中一連桿運動時,其他機件間的相對運動無法預期,稱為無拘束運動鏈。

31
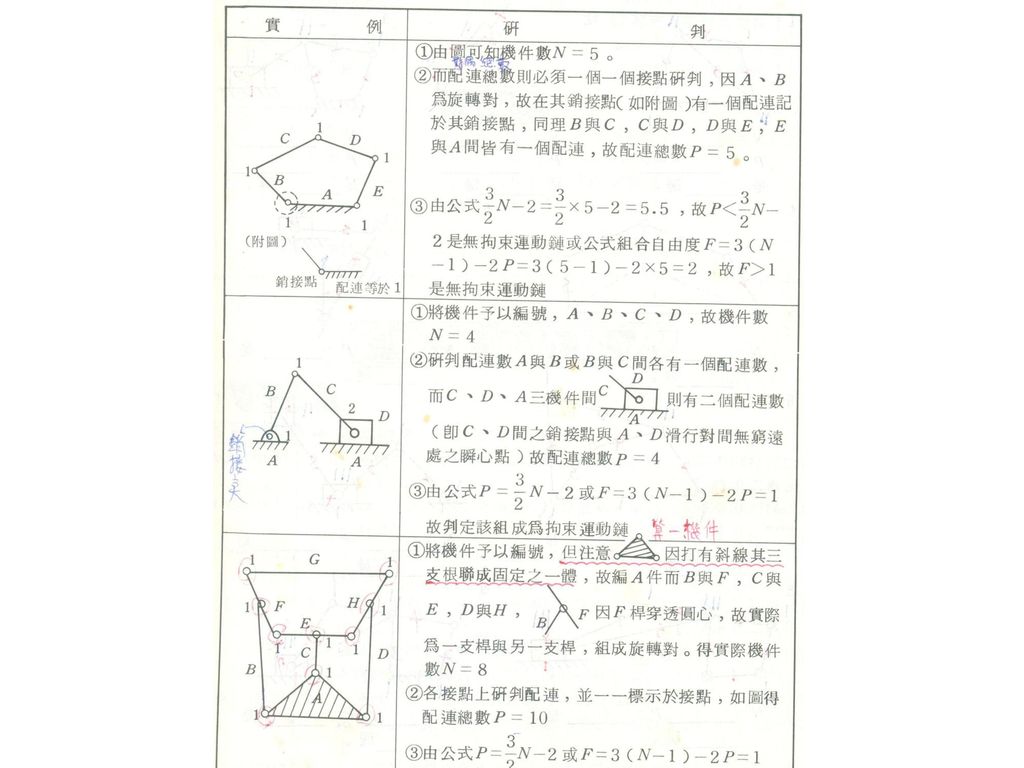
例題1:如圖1-21所示之連桿組,試研判是哪一種運動鏈?
例題2:如圖1-22所示之連桿組,試研判是哪一種運動鏈?

34
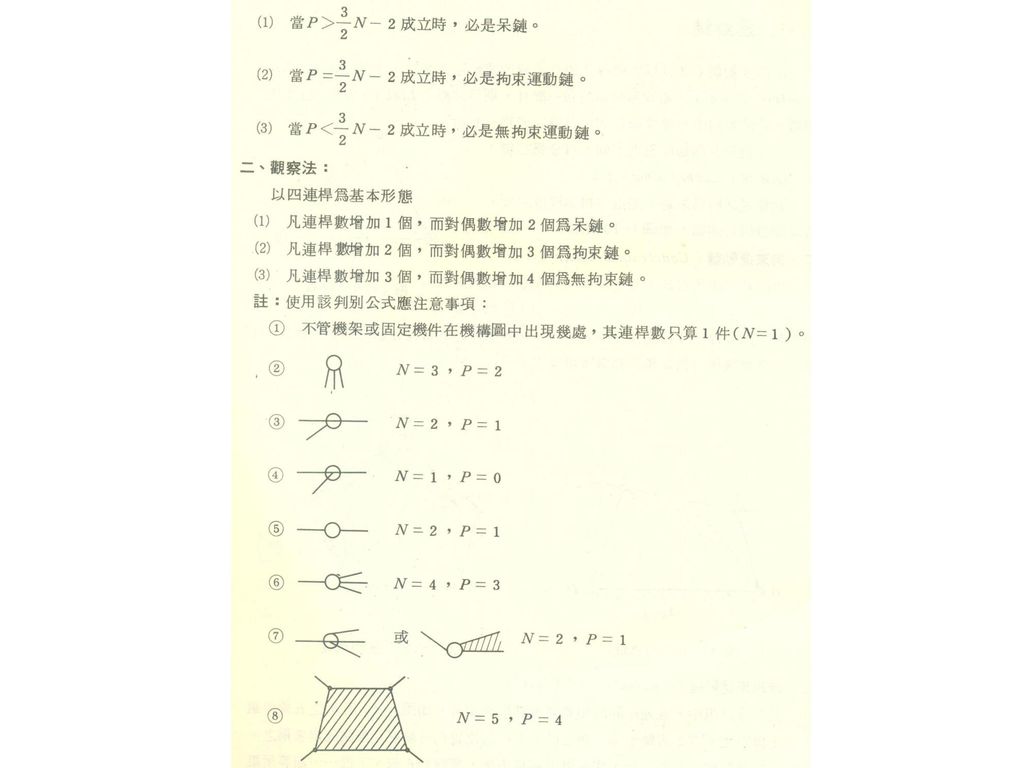
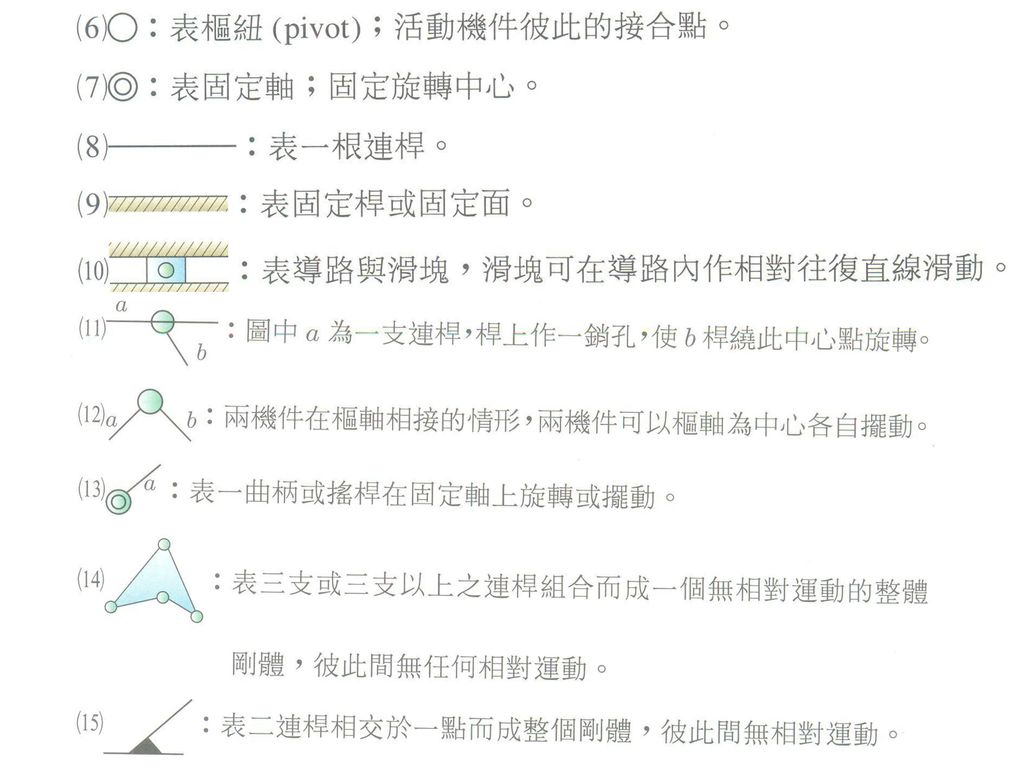
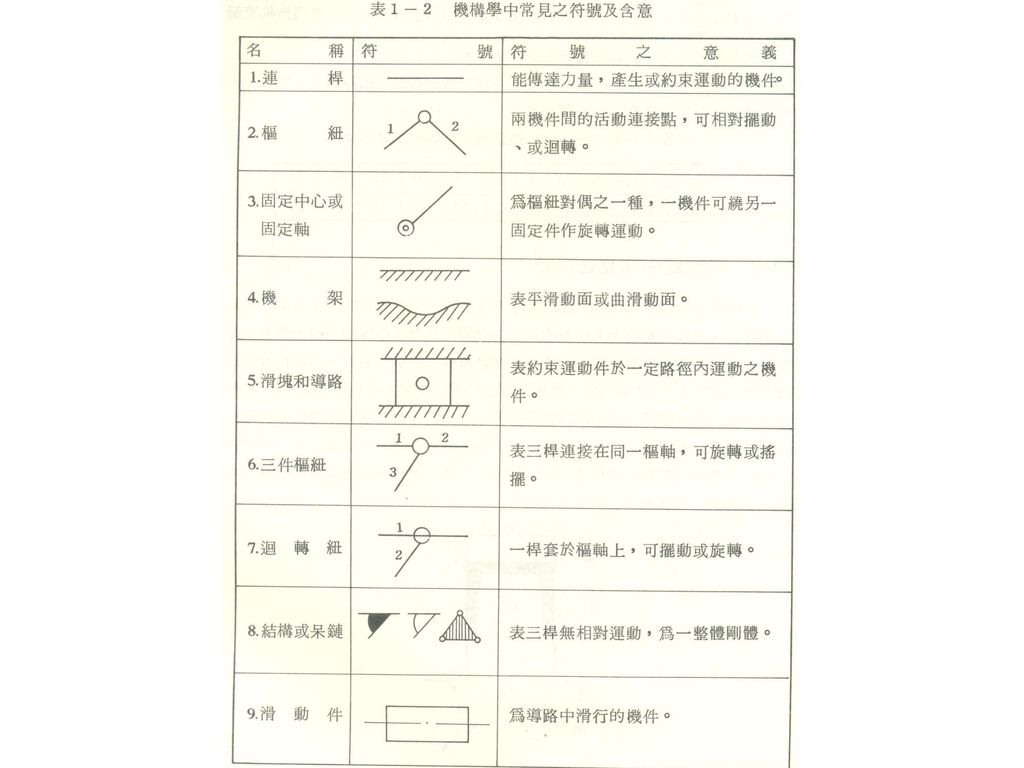
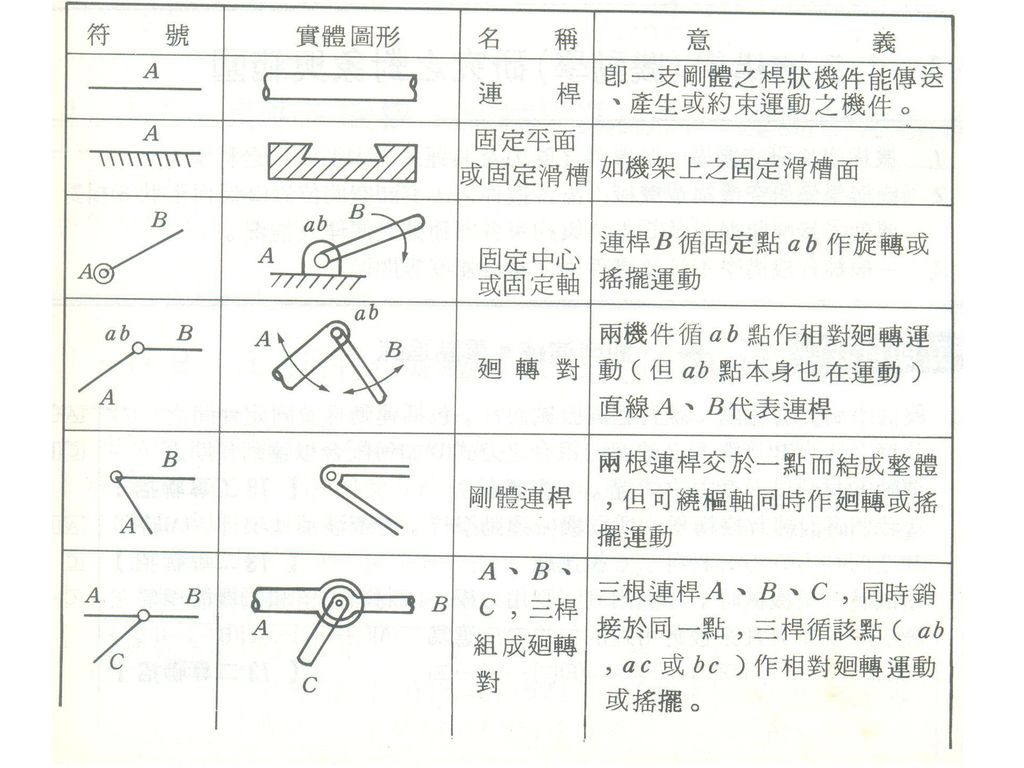
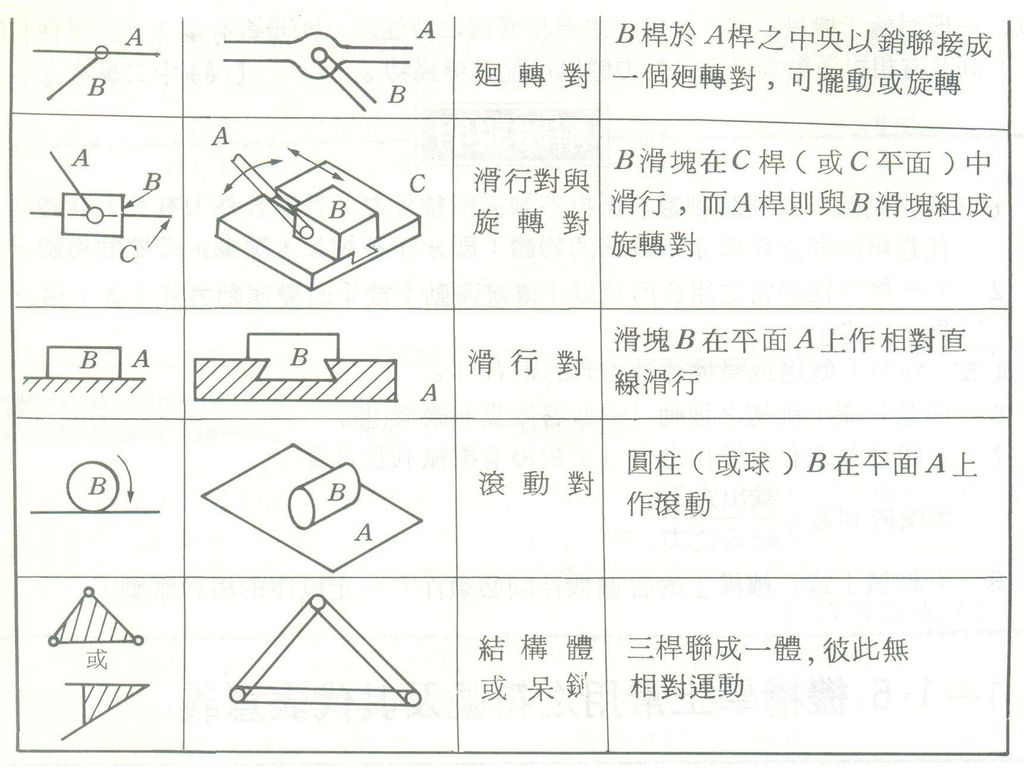
名詞解釋及常用符號

35
曲柄活塞機構




 二、一維自由落體運動的特性 範例 1 自由落體( v 0 =0 ) 範例 2 自由落體的函數圖 範例 3 鉛直上拋 範例 4 自由落體運動公式.>")
















