Download presentation
1
機械視覺概論 生產自動化

2
背景 近年來,機器視覺已在各式各樣的領域中扮演著舉足輕重的地位,並大量的運用在遙測、醫工、地質探測、物件識別檢測以及家電用品等場合。這些應用技術的實例正快速的成長,也由於電子硬體,電腦效率的大幅進步,而以驚人的變革速度在更新它們的面貌而在促進產業升級的呼聲中,大力推展自動化機器視覺乃當務首要之急。 國內在一般生產系統中,由於產品的檢測耗費人力資源且淘汰劣品而降低生產量,而與生產單位的目標相衝突,因此業界往往無法進行線上100%之產品檢驗,而機器視覺系統乃自動化檢測之經濟有效的方式。

3
什麼是機器視覺 ? 模擬人類的眼、腦與手的動作。 機器視覺系統是一項集光學、電子、機械及電腦資訊技術整合的科技。
為了取得某些資訊以控制機器或製程,而利用光學及非接觸性觸感方式來擷取影像並解釋影像。 CCD 電腦 機器人

4
機器視覺系統相關領域

5
為什麼要機械視覺? 安全 全檢 重現性(降低人為誤差) 降低成本 高速化 細微化 回饋化 高精度
 降低成本 高速化 細微化 回饋化 高精度")
6
應用層面 近來科技的發展,所產生的機器視覺系統不斷推陳出新,在一切要求自動化的前題之下機器視覺加上影像處理系統已經在許多工廠自動化量測方面扮演著重要的角色,例如布匹線上檢測系統、銲道追蹤及熔渣監控、射出成型產品之應力測量,生產工件形狀檢測、沖壓元件的曲面測量,熱軋鋼板尺寸及瑕疵檢測等,在非接觸性的要求下,均可利用機器視覺處理系統來完成,不僅可提高工廠生產效率,更可使產品之品質達到標準。

7
機器視覺技術之應用

8
機械視覺系統之組成 主控器(Host Computer) 影像擷取卡(Frame Grabber)+影像處理器 影像攝影機 照明設備
影像顯示器 機構及控制系統

9
視覺系統組成

10
電腦視覺系統的主件 硬體 : 必須具有 在設計上 軟體 成本效益(cost-effective)
與其他系統無關(off-the-shelf system)的特性 在設計上 容易使用(easy of use) 具模組和彈性化(modular flexibility) 軟體 速度快(speed) 可靠(reliability)
的特性. 在設計上. 容易使用(easy of use) 具模組和彈性化(modular flexibility) 軟體. 速度快(speed) 可靠(reliability)")
11
成像基本原理

12
成像基本原理

13
CCD攝影機 類比式 輸出訊號:美規→RS170(黑白)/NTSC(彩色) 數位式 種類
歐規→CCIR(黑白)/PAL(彩色) 掃瞄方式:交錯(Interlace)/非交錯(Non-Interlace) 數位式 輸出訊號:RS422/LVDS/IEEE-1394/USB/特定格式 歐規→CCIR(黑白)/PAL(彩色) 掃瞄方式:非交錯式 種類 面掃瞄 Line掃瞄 TDI(Time Delay Integration)掃瞄
/PAL(彩色) 掃瞄方式:交錯(Interlace)/非交錯(Non-Interlace) 數位式. 輸出訊號:RS422/LVDS/IEEE-1394/USB/特定格式. 歐規→CCIR(黑白)/PAL(彩色) 掃瞄方式:非交錯式. 種類. 面掃瞄. Line掃瞄. TDI(Time Delay Integration)掃瞄.")
14
CCD輸出時序

15
圖場

16
影像處理器 固定功能影像處理器 影像擷取卡 特色:擷取卡功能依需要有多種選擇 架構在個人電腦具彈性

17
影像卡結構 影像卡基本模組 A/D轉換器 PC匯流排介面 影像儲存 影像處理器介面 影像處理器 系統鐘脈 控制單元 D/A轉換器
擷取CCD影像類比信號轉換為數位信號 PC匯流排介面 扮演電腦與影像卡之間橋樑 影像儲存 影像處理器介面 影像處理器存取記憶體之緩衝電路 影像處理器 快速執行低階運算 系統鐘脈 提供穩定工作頻率 控制單元 協調各模組間之運作 D/A轉換器 將數位影像轉換以輸出監視器 影像卡基本模組

18
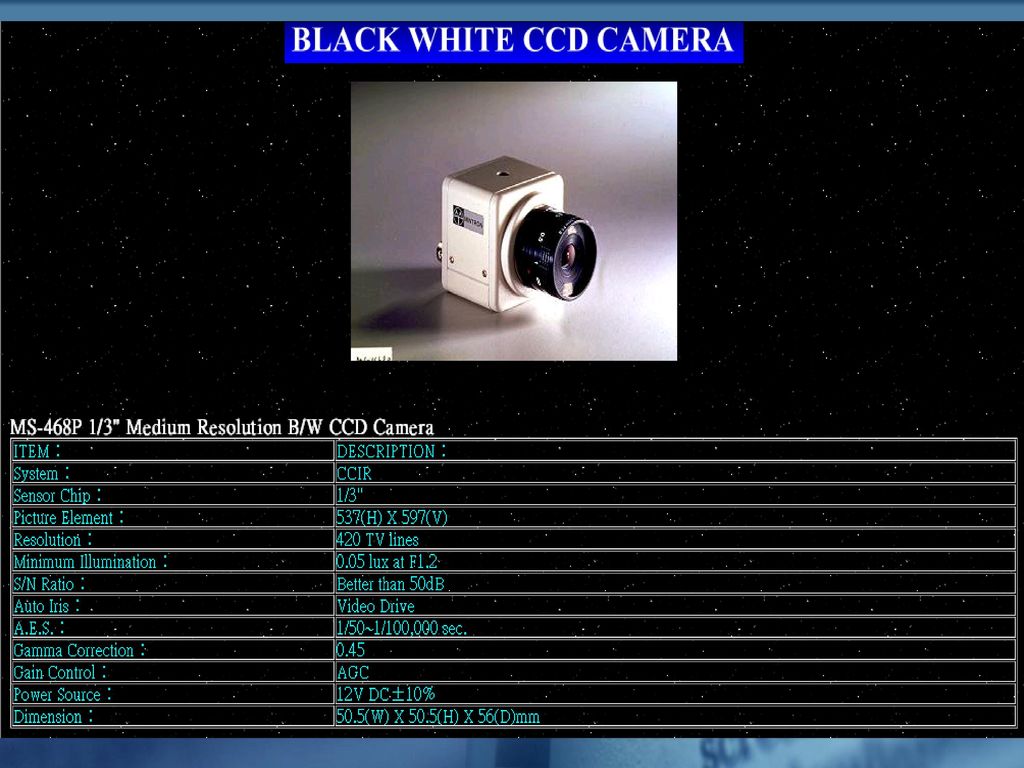
影像擷取卡主要基本功能 可接美規/歐規,彩色/黑白訊號 PCI BUS/AGP BUS 美規可抓取640(H)x480(V)pixels
![]()
19
影像擷取卡Enhanced功能 可由外部觸發(trigger)取像 on board DSP/processor 特殊運算處理器
Variable Scan接不同規格訊號

20
鏡頭 CCTV鏡頭: 1.提供不同固定焦距選擇 2.變焦鏡頭 Telecentric鏡頭
35mm SLR Camera鏡頭:nikon、canon等照相機鏡頭 顯微鏡頭 120相機(60x45mm film)用鏡頭
用鏡頭.")
21
光源裝置 Halogen光源 LED光源 高週波螢光燈源 閃光燈源 其他特殊光源

22
機構/控制單元 系統機台 電控(PLC、PC-Base) X-Y精密Table 系統整合、穩定度測試
 X-Y精密Table 系統整合、穩定度測試")
23
Area CCD Camera感光元件大小

24
CCD Camera主要功能 電子快門(shutter) Auto Gain Control(AGC): Gamma Sync
Resolution Trigger

25
CCD Sensor 規格 Sensor尺寸大小(2/3”、1/2”、1/3”、1/4”、特別尺寸)
有效畫素:NTSC→〈768Hx494V〉 PAL→〈752Hx582V〉 全部畫素:NTSC→〈811Hx508V〉 PAL→〈795Hx596V〉 Sensitivity(最小照度) Cell Size(8~10μm) 頻譜響應
 Cell Size(8~10μm) 頻譜響應.")
26
鏡頭基本觀念 景深(Depth of View) 視野(Field of View) 解析力(Resolution)
光圈(IRIS/Aperture) 視角(View / angle) 焦距長(Focal length)
 視角(View / angle) 焦距長(Focal length)")
28
鏡頭參數相互關係 光圈大小與景深成反比 鏡頭焦距與景深成反比 視角愈廣,景深長 以對焦點為界,前方景深短,後方景深長

29
景深 將成像幕移動而不致影響清晰度之最大距離

30
CCTV鏡頭 固定焦距(f=6mm~f=100mm) 便宜 會隨工件距離不同,影像大小改變 可搭配延伸環,達到放大效果 有變焦鏡頭供選擇
工作距離很長(低倍率) 失真高(高倍率時) 可用不同濾鏡加強影像特徵
 失真高(高倍率時) 可用不同濾鏡加強影像特徵.")
33
Telecentric鏡頭 平行光輸入,沒有視角誤差 鏡頭大於實際FOV 同軸光輸入 價錢較貴 低失真 體積小重量輕 工件距離固定
可另外選擇不同工作距離鏡頭 適合顯微放大應用

34
Telecentric鏡頭

35
35mm鏡頭 鏡頭口徑大 可選購C-mount轉接環接C-mount攝影機 透光性較好,鏡頭較銳利
高解析CCD(2048pixel以上)適用
適用.")
36
顯微鏡頭 1x、 2x、 5x、 10x、 20x、 50x、 60x不同倍率供選擇 景深淺 工作距離短

37
何謂放大倍率 鏡頭放大倍率(光學倍率/主要放大倍率) 定義:感光元件大小和FOV的比例 Monitor放大倍率(9吋/14吋)
系統全部放大倍率:主要放大倍率 X Monitor放大倍率

38
如何使CCTV鏡頭做顯微放大 用延伸環 使用加倍鏡(放在鏡頭和CCD中間) Close up鏡(縮短距離) M(放大倍率)= I(像距)
 Close up鏡(縮短距離) M(放大倍率)= I(像距)")
39
CCTV鏡頭和Telecentric鏡頭比較
CCTV Lens 物體側Telecentric Lens 兩側Telecentric Lens 優點 *尺寸小 *價錢便宜 *工作距離改變,Sample大小不會改變 *當使用同軸光時,可達到小型化 *光圈可調,可提高景深 *零失真 缺點 *工作距離改變Sample大小改變 *當有同軸光時,鏡頭會大於一般鏡頭大小 *沒有同軸光時,鏡頭較大,且價位高

40
光源基本介紹 光源種類 色溫觀念(色溫↑ color ccd感光愈好) 打光的重要性 光源照射頻率:恆定光源/閃光光源
光源的光線擴散及導引方式:光纖、空氣、壓克力、玻璃鏡組等

41
打光技巧 打光好壞直接影響到取影品質,好的打光技巧不但可以凸顯物體的對比且清楚的顯示被攝物體表現的紋路、特徵以及減少影像的雜訊。常見打光的技巧有 a. Back lighting b. Directed lighting c. Vertical lighting d. Fluorescent lighting e. Bidirectional lighting f. Diffuse lighting

42
打光技巧

43
照明的目的 獲得良好的對比 顯示顯像細節 降低系統複雜度 強化物體特徵 增加信號/雜訊比例

44
人工光源

45
Halogen光源 特色: 提供高亮度光源(50W、 100W、 150W、200W) 不同light guide可搭配
Remote control亮度功能(數位或類比) 燈泡更換容易 可加裝濾鏡 亮度穩定,不會產生熱
 燈泡更換容易. 可加裝濾鏡. 亮度穩定,不會產生熱.")
46
Halogen光源 光纖導管(light guide )種類 環形 線型 背光板 單束 雙束 多束 擴散型 特別設計
種類 環形 線型 背光板 單束 雙束 多束 擴散型 特別設計")
47
LED光源 特色: 低消耗功率,power單純 針對不同應用,不同形式設計 可提供不同顏色的LED,產生不同效應
壽命長(約40000小時以上)
")
48
LED光源 LED模組種類 環形投射 低角度投射 擴散投射 無影投射 四邊投射 背光板式投射 特殊設計

49
高週波螢光燈源 特色: 高頻點燈,避免閃爍(30KHZ~50KHZ) 不同外徑供選擇 可選擇不同顏色燈管,做不同應用
色溫高(約5400oK以上)彩色CCD適用 燈管壽命長(約2000小時) 擴散板光線柔和,減少反光
彩色CCD適用. 燈管壽命長(約2000小時) 擴散板光線柔和,減少反光.")
50
閃光燈源 特色: 閃光頻率快,瞬間能量強 適合快速檢測 可由外部調整頻率 燈管壽命約4000小時,但價錢高
可外接不同light guide導光

51
濾光鏡 為一種輔助CCD而用來擷取更清晰影像的工具,可視為一種影像前處理。 常用濾光鏡及其相對功能 UV Filter︰過濾紫外線
KR Filter︰降低色溫,使影像偏向紅色 KB Filter︰增加色溫,使影像偏向藍色 PL Filter︰消除反射光 PF Filter︰檢視透明工件於射出成型所造成內部材料應力的分佈

52
影像分析處理流程

53
影像分析處理基本原理介紹 影像表示 基本分析 影像前處理 影像分割 進階分析 特徵擷取 建立和訓練分類模型 偵測/確認

54
影像表示 影像資料最容易的表達方法為利用矩陣,矩陣內的每一點表示待測物經光源反射後被CCD所擷取的數值透過影像卡所轉換的數值,就不同領域上的應用分析可分成兩大領域 空間域 二值影像(Binary Images) : 其數值由0,1所組成 灰階值影像(Gray-Scale Images) : 其數值介於0至255之間 彩色影像(Color Images) : 由R,G,B所組成,其數值介於0至255之間 頻率域: 由空間域影像透過轉換(如複利葉, 小波)而形成的影像表示空間
 : 其數值介於0至255之間. 彩色影像(Color Images) : 由R,G,B所組成,其數值介於0至255之間. 頻率域: 由空間域影像透過轉換(如複利葉, 小波)而形成的影像表示空間.")
55
黑白影像 灰階影像, 其數值為0至255 二值影像, 其數值為0或1

56
複利葉轉換

57
影像前處理 - 濾波技巧 Noise Removal by filters Image Enhancement by filters
Mean filters Median filters Image Enhancement by filters Roberts filters Sobel filters Laplacian filters Prewitt filters Kirsch filters Robinson filters Frei-Chen filters

58
濾波(Filters)基本概念 Laplacian Filter 1 3 5 2 1 4 1 2 1 3 4 1 4 2 5 (0×3)+(1 ×5)+(0 ×2)+(1 ×2)+(-4 ×3)+(1 ×4)+(0 ×4)+(1 ×2)+(0 ×5)=1
+(1 ×5)+(0 ×2)+(1 ×2)+(-4 ×3)+(1 ×4)+(0 ×4)+(1 ×2)+(0 ×5)=1.")
59
Example of Noise Removal
Mean Filters

60
Image Enhancement by Filters
Sobel filter

61
Image Enhancement by Thresholding

62
影像分割 目的 : 將影像做細分成某些組成部份,其細分程度取決於所欲分離的目的物, 當目的物被分離, 則分割停止。 方法 : 濾波技巧
臨界值(threshold)法
法.")
63
使用濾波進行影像分割 Soble Filter

64
臨界值技巧進行影像分割 臨界值基本概念 : 利用影像灰階直方圖對影像做分割 依影像特性可分成兩大類 : 二值法 多值法

65
Example Threshold

66
特徵擷取 何謂特徵擷取? 對於工件的辨識或是瑕疵分類來說,通常要從原始影像直接做分析並非易事。因此在作法上,會先對原始影像作一先前處理,如影像強化,接著利用影像分割技巧將所要辨識或是分類的物件框起來,然後對所框區域的灰階值(以單色為例)資料進行彙總。 此彙總的值就稱為特徵值,其目的再於透過特徵值可以用來區分不同物件之間的差異性。 特徵擷取的重要性 一個好的特徵值不但可以使辨識變得簡單容易,而且可以提高辨識的準確度。如要進行犯罪的辨識採用指紋作為特徵值一定會比用年齡或性別來的有效。
資料進行彙總。 此彙總的值就稱為特徵值,其目的再於透過特徵值可以用來區分不同物件之間的差異性。 特徵擷取的重要性. 一個好的特徵值不但可以使辨識變得簡單容易,而且可以提高辨識的準確度。如要進行犯罪的辨識採用指紋作為特徵值一定會比用年齡或性別來的有效。")
67
特徵擷取的原則 需要對資料的特性有充分的瞭解。基本上這是要靠經驗或是專家來決定而無客觀的標準可循。總括而言,可根據底下原則作為參考
就數量而言宜少不宜多,就計算而言宜簡不宜繁。 要有一定程度的代表性(物理性)且能夠真正使物件之間有明顯差異。 特徵值應具可測性、可行性及獨立性。 具穩健性。 考慮對影像旋轉、放大、及平移的影響。
且能夠真正使物件之間有明顯差異。 特徵值應具可測性、可行性及獨立性。 具穩健性。 考慮對影像旋轉、放大、及平移的影響。")
68
常用特徵變數 Area Box area Perimeter Major axis No. of holes Minor axis
Hole area Centered Radius Center of gravity distance second moment Minimum enclosing rectangle Box area Major axis Minor axis Angles Area ratio Elongation Circularity Euler number Shape number

69
Example 1 of Feature Measure
Object 2 Object 3 Object 1 Obj AREA PERI XMIN XMAX YMIN YMAX WDTH HGHT ANGLE

70
Example 2 of Feature Measure

71
結論 如何使視覺系統成功 打光重要性優先考量 鏡頭正確選擇(大小、空間、失真考量) 攝影機正確選擇(功能性、穩定性、耐用)
機構穩定、避免干擾、接地問題考量 經驗累積(多嘗試、思考解決問題) 斤斤計較(精度提升、縮短Process Time)
 斤斤計較(精度提升、縮短Process Time)")





 “ 一出动人的戏,一部具有伟大性质的长剧。 ” (李健吾) 《雷雨》的社会影响。 1935 年初,《雷雨》首次被搬上日 本舞台,演出盛况空前,不久,它 又被译成日文。>")




 중원파워콘트롤스>")





>")





