Download presentation
Presentation is loading. Please wait.

1
Chapter three the Z Transform Z 变换
3.0 Introduction 3.1 the Z transform Z变换 3.2 Properies of the Region Of Convergence for the Z transform收敛域 3.3 The Inverse z-Transform Z逆变换 3.4 Properties of the z-Transform Z变换的性质 3.5 Summary

2
Homework pp b f g 3.2 b c 3.8 3.19 b 3.20 a

3
3.0 Introduction Advantages of Z transform
It suits for more sequence analysis than Fourier transform. For many cases, we could have Z transforms for sequences when their Fourier transfroms do not exsist. It is more convenient than Fourier transform in many analytical problem.

4
3.1 The Z transform Z变换 信号与系统的分析方法有时域、变换域两种。 一.时域分析法 1.连续时间信号与系统:
信号的时域运算,时域分解,经典时域分析法,近代时域分析法,卷积积分。 2.离散时间信号与系统: 序列的变换与运算,卷积和,差分方程的求解。 二.变换域分析法 信号与系统的频域分析、复频域 分析。 Z变换,DFT(FFT)。Z变换可将差分方程转化为代数方程。
。Z变换可将差分方程转化为代数方程。")
5
Then we get Fourier transform of h[n]. is system’s frequency response.
H(z) is called as the transfer function传递函数 of system. That’s the reason we discuss z-transform.
![Then we get Fourier transform of h[n]. is system’s frequency response.](http://slidesplayer.com/slide/13248416/79/images/5/Then+we+get+Fourier+transform+of+h%5Bn%5D.+is+system%E2%80%99s+frequency+response..jpg "H(z) is called as the transfer function传递函数 of system. That’s the reason we discuss z-transform.")
6
Z transform of sequence
For a given sequence x[n], its z-transform is defined as Where z=Re{z}+jIm{z} is a complex variable. Notation: X(z) exists only when the summation converges. So X(z) is only defined for the regions of the complex z plane in which the summation is on the right convergence.正确收敛. 实际上,z 变换是将x(n)展为z-1的幂级数。
 exists only when the summation converges. So X(z) is only defined for the regions of the complex z plane in which the summation is on the right convergence.正确收敛. 实际上,z 变换是将x(n)展为z-1的幂级数。")
7
The set R of values of z for which its z-transform converges is called the Region Of Convergence (ROC)收敛域. X(z) converges if and only if In general, the region of convergence R of a z-transform for a sequence x[n] is an annular region环形区域 of the z-plane(z平面). proof
 converges if and only if. In general, the region of convergence R of a z-transform for a sequence x[n] is an annular region环形区域 of the z-plane(z平面). proof.")
8
Figure of ROC R1 < |z| < R2
z=Re{z}+jIm{z} Re{z} Im{z} R2 R1

9
Solution:it is a finite length sequence. its z transform is
Example 3.1.1 Solution:it is a finite length sequence. its z transform is and its ROC is or we can say all z plane is its ROC.

10
Zeros and Poles of Rational z-transforms 有理Z变换的零点和极点
In the case of LTI discrete-time system with that we are concerned in this course, all pertinent相关的 z-transforms are rational functions of z-1, we call them as Rational z-transforms. A rational z-transform could be written as a ratio of two polynomials多项式 in z-1: where the degree of the numerator polynomial N(z) is M and that of the denominator polynomial D(z) is N.
 is M and that of the denominator polynomial D(z) is N.")
11
Alternately,it can be rewritten in factor form因式形式 as
At roots z=ξl of the numerator分子polynomial, X(z)=0, they are called as the zeros零点of X(z); At roots z=λk of the denominator polynomial分母多项式, , they are known as the poles 极点of X(z).
=0, they are called as the zeros零点of X(z); At roots z=λk of the denominator polynomial分母多项式, , they are known as the poles 极点of X(z).")
12
Compute the z transform of x[n] = u[n]. Solution:
Example 3.1.2 Compute the z transform of x[n] = u[n]. Solution: X 1 zero pole
![Compute the z transform of x[n] = u[n]. Solution:](http://slidesplayer.com/slide/13248416/79/images/12/Compute+the+z+transform+of+x%5Bn%5D+%3D+u%5Bn%5D.+Solution%3A.jpg "Example Compute the z transform of x[n] = u[n]. Solution: X. 1. zero. pole.")
13
3.2 Properies of the Region Of Convergence for the Z transform收敛域性质
8 important properties about the Z transform and its ROC are listed on page 105. Here we introduce some of them.

14
Prop. 4. Finite-length sequences & its ROC有限长度序列的收敛域
sample sequence

15
See example 3.1.1

16
Prop.5 Right-sided sequences & its ROC. 右边序列的ROC为某个圆之外
x[n] n n1 . 1 ... In this case, the z transform converges for proof

17
Since |x[n]z-n| must be finite, then if n0<0, the ROC excludes |z|=∞.
收敛域
![Since |x[n]z-n| must be finite, then if n0<0, the ROC excludes |z|=∞.](http://slidesplayer.com/slide/13248416/79/images/17/Since+%7Cx%5Bn%5Dz-n%7C+must+be+finite%2C+then+if+n0%3C0%2C+the+ROC+excludes+%7Cz%7C%3D%E2%88%9E..jpg "收敛域.")
18
Prop.6 Left-sided sequences & its ROC 左边序列的收敛域为圆之内
x[n] n n2 … In this case, the z transform converges for |z|<r2

19
Since |x[n]z-n| must be finite, then if n0>0, the ROC excludes |z|=0.
![Since |x[n]z-n| must be finite, then if n0>0, the ROC excludes |z|=0.](http://slidesplayer.com/slide/13248416/79/images/19/Since+%7Cx%5Bn%5Dz-n%7C+must+be+finite%2C+then+if+n0%3E0%2C+the+ROC+excludes+%7Cz%7C%3D0..jpg "Since |x[n]z-n| must be finite, then if n0>0, the ROC excludes |z|=0.")
20
Prop.7 Two-sided sequences & its ROC 双边序列的收敛域是个圆环
n x[n] The z transform converges for r1<|z|<r2.

21
If r1>r2, the z transform does not exist.

22
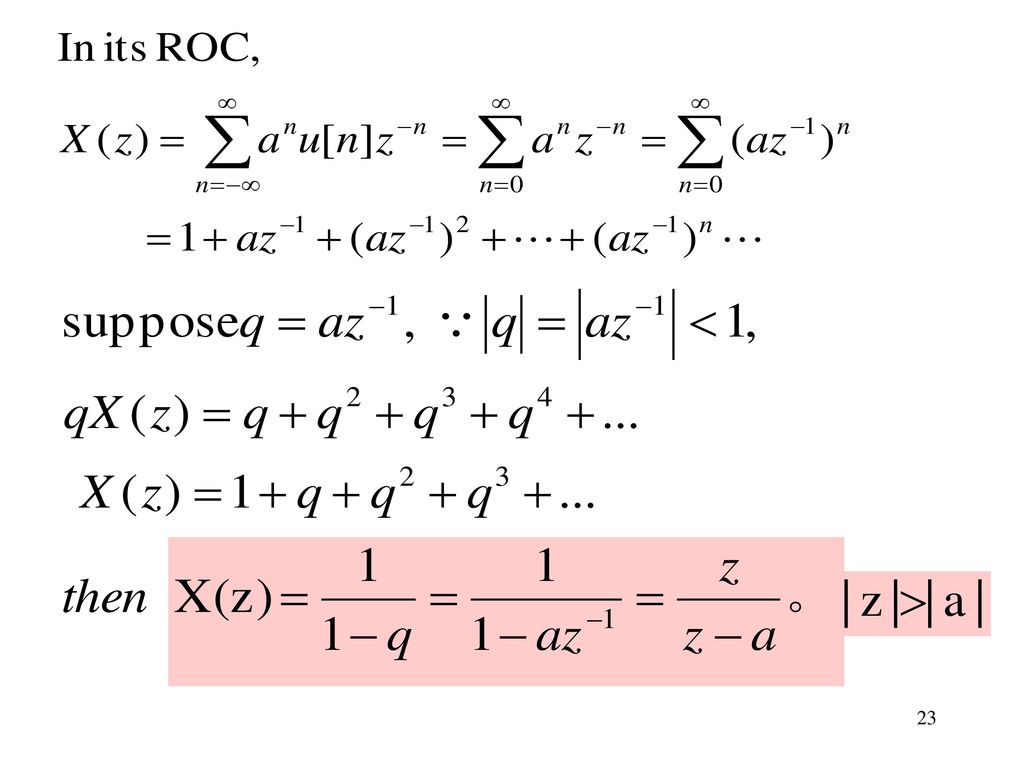
Example 3.2.1 Solution: it converges when

24
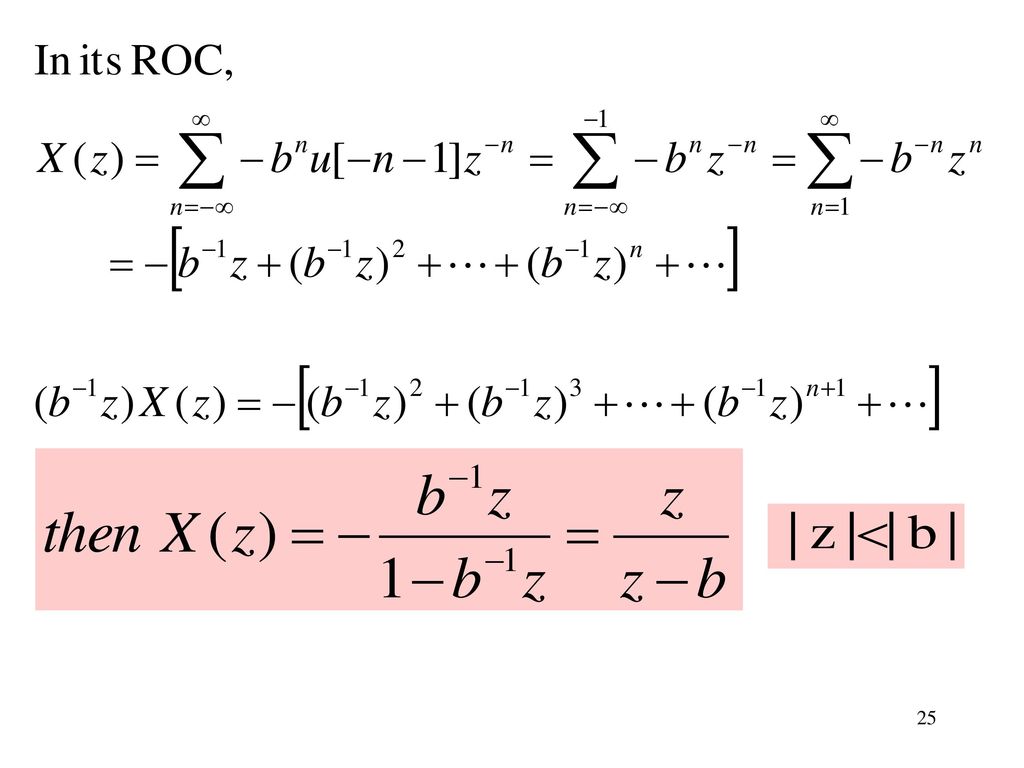
Example 3.2.2 Solution: it converges when

26
Compare this result to the example 2. 2
Compare this result to the example 2.2.3, then we find their z transform have the same expression. Notation: To specify a z-transform completely, its Region Of Convergence (ROC) must be supplied at the same time.
 must be supplied at the same time.")
27
Right-sided sequences
Prop.3 the ROC cannot contain any poles. Prop.8 the ROC must be a connected region. For a sequence with a rational z-transform, the ROC of its z transform cannot contain any poles and is bounded by the poles. Right-sided sequences X p1 p2 In the pole-zero plot of the z transform, where the location of the pole is indicated by a cross “ X ” and the location of the zero is indicated by a circle “ o ”.

28
Left-sided sequences Two-sided sequences X p1 p2 X p1 p2

29
Use prop.2 to analyze the stability of system.
Two conclusions: If the ROC of H(z) include the unit circle |z|=1, then the system with impulse response is stable. 稳定系统的冲击响应Z变换H(z)的收敛域必包含单位圆。(proof) For a causal stable system, all of the poles of its H(z) must be inside the unit circle.因果稳定系统的H(z)的所有极点必定在单位圆之内。 (proof)
 include the unit circle |z|=1, then the system with impulse response. is stable. 稳定系统的冲击响应Z变换H(z)的收敛域必包含单位圆。(proof) For a causal stable system, all of the poles of its H(z) must be inside the unit circle.因果稳定系统的H(z)的所有极点必定在单位圆之内。 (proof)")
30
Proof for the first conclusion
The necessary and sufficient condition for a system to be BIBO: The convergence condition of H(z): For H(z) on the unit circle, we have |z|=1, then i.e. when system is stable, then H(z)||z|=1 exists. Or, H(z) converges on unit circle.
: For H(z) on the unit circle, we have |z|=1, then. i.e. when system is stable, then H(z)||z|=1 exists. Or, H(z) converges on unit circle.")
31
Proof for the second conclusion
From Chapter 2 conclusion: The h(n) of a causal system is a right-sided sequence.因果系统的h(n)必定是右边序列。 Then the ROC of H(z) is defined as |z|>pm (where pm=max{pi} i=0,1,2,…,N) and its ROC should include unit circle. i.e. pm<1 Then all pi<1 is proved. 收敛域
 of a causal system is a right-sided sequence.因果系统的h(n)必定是右边序列。 Then the ROC of H(z) is defined as |z|>pm. (where pm=max{pi} i=0,1,2,…,N) and its ROC should. include unit circle. i.e. pm<1. Then all pi<1 is. proved. 收敛域.")
32
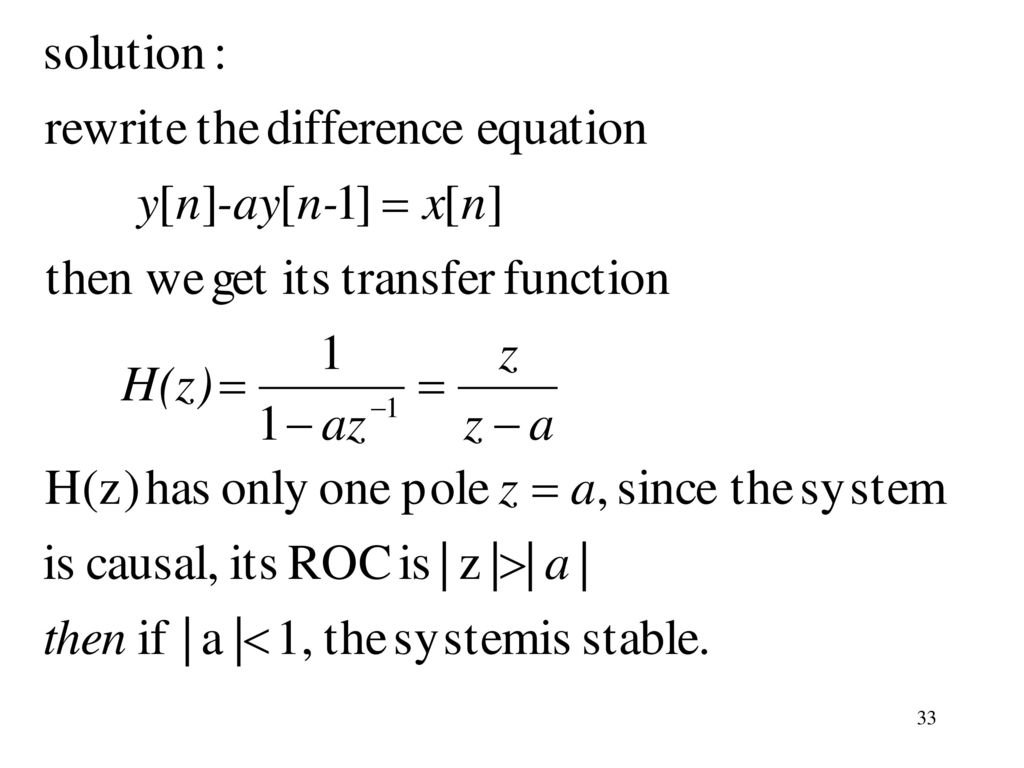
Example3.2.3 Determine the stability in z domain for a causal system described with following difference equation: y[n]=ay[n-1]+x[n].

34
3.3 The Inverse Z transform Z反变换
We can get a formal formula for the inverse z transform from the Cauchy integral theorem and compute it based on residue theorem. 正式的Z变换公式可由柯西积分定理导出并用留数法求解之。 Here we only give some convinient methods. Very often we need to determine which sequence corresponds to a given z transform.

35
3.3.1 Inspection method Use table 3.1 on page 104 to get the inverse Z transform for some common sequences’ representation in Z domain.

36
3.3.2 Computation based on partial-fraction expansions部分分式展开法
principle: if X(z) is a ratio of polynomials of B(z) and A(z) B(z) and A(z) are real coefficient polynomials,they have no common factor无公共因子 then X(z) is the z transform of x[n] Xi(z) is the z transform of xi[n](i=1,2,…,K)
 is a ratio of polynomials of B(z) and A(z) B(z) and A(z) are real coefficient polynomials,they have no common factor无公共因子. then. X(z) is the z transform of x[n] Xi(z) is the z transform of xi[n](i=1,2,…,K)")
37
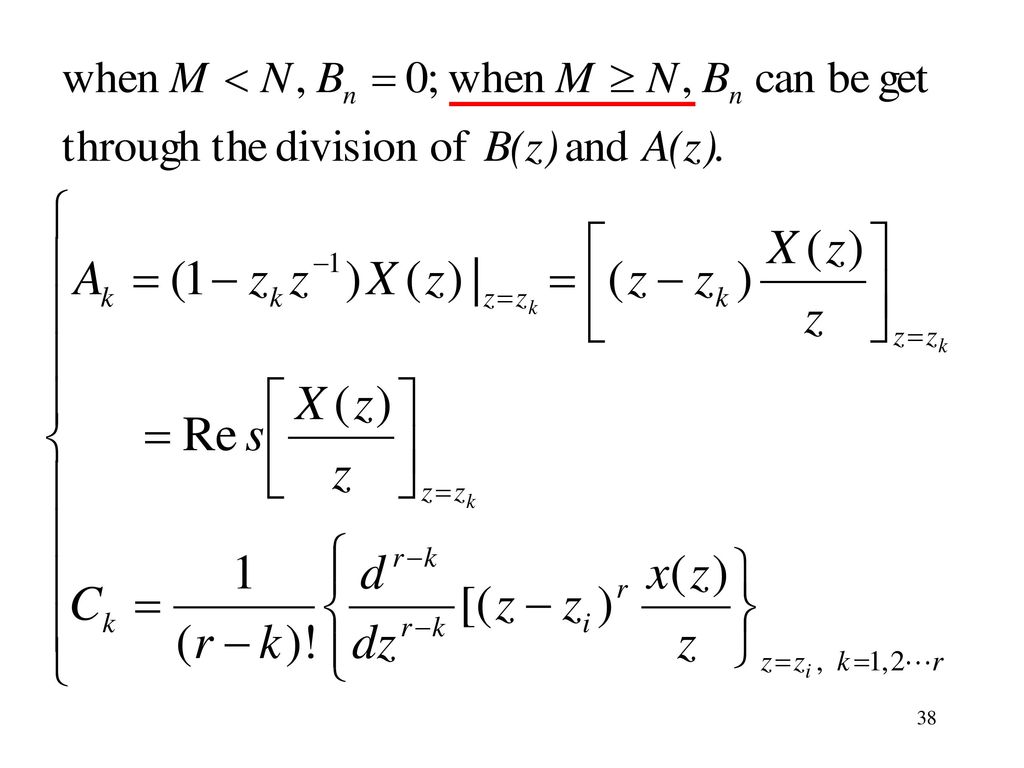
zi X(z)的r重极点 zk X(z)的一阶极点(k=1,2,…,N-r) Bn X(z)的整式部分的系数(长除法), 仅当 M N时存在 Ak 留数定理(单极点) Ck 留数定理(r重极点)
")
39
Steps to determine its inverse z transform
1st: Express X(z) in a proper fraction way; 2nd: Calculate the coefficients Ak, Bn and Ck; 3rd: Find the inverse z transform for each term; 4th: Summing the inverse transform of the individual simple terms in the expansion.
 in a proper fraction way; 2nd: Calculate the coefficients Ak, Bn and Ck; 3rd: Find the inverse z transform for each term; 4th: Summing the inverse transform of the individual simple terms in the expansion.")
40
Example3.3.1 determine the inverse z transform of X(z) with its partial fraction expression.
Solution:

41
Look up the table on page 104, it’s a right-handed
seq.

42
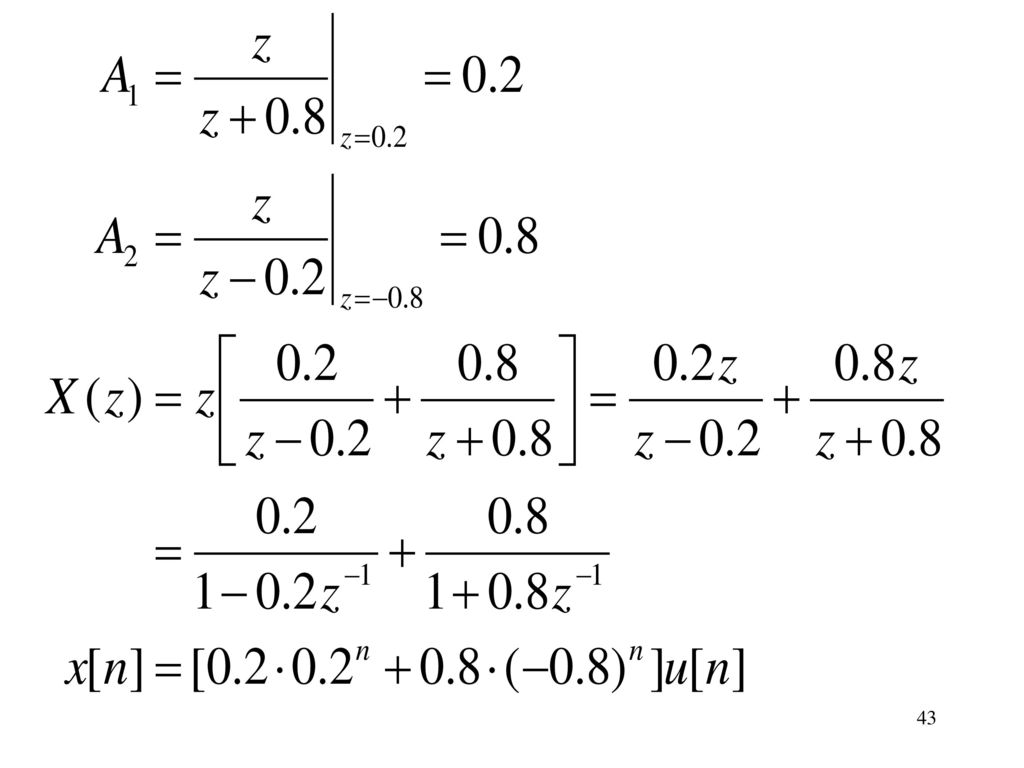
Compute the inverse z transform of
Example 3.3.2 Compute the inverse z transform of provided that x[n] is causal. Solution: A right-sided sequence

44
3.3.3 Series expansion or Computation based on polynomial division 级数展开法/长除法
For X(z) = N(z) / D(z), we can perform dividing N(z) by D(z) and the quotient商 is a power series of z. In the power series幂级数, the coefficient of the term involving z–n simply corresponds the sequence x[n]. Note: the long division长除法 can only be used in the case of one-sided sequences. Samples for sequence x[n] in time domain 如收敛域为|z|>Rx+, x(n)为因果序列,则X(z)展成Z的负幂级数。 若收敛域|Z|<Rx-, x(n)必为左边序列,主要展成 Z的正幂级数。
 = N(z) / D(z), we can perform dividing N(z) by D(z) and the quotient商 is a power series of z. In the power series幂级数, the coefficient of the term involving z–n simply corresponds the sequence x[n]. Note: the long division长除法 can only be used in the case of one-sided sequences. Samples for sequence x[n] in time domain. 如收敛域为|z|>Rx+, x(n)为因果序列,则X(z)展成Z的负幂级数。 若收敛域|Z|<Rx-, x(n)必为左边序列,主要展成 Z的正幂级数。")
45
Steps to compute the inverse z transform
1st: express the numerator分子 and the denominator 分母 as polynomials in z -1; 2nd: obtain the power series expansion by long division; 3rd: extract the coefficients of the power series.

46
Compute the inverse z transform of
Example 3.3.3 Compute the inverse z transform of Solution Right-sided seq.

47
Compute the inverse z transform of
Example 3.3.4 Compute the inverse z transform of Solution: left-sided seq.

48
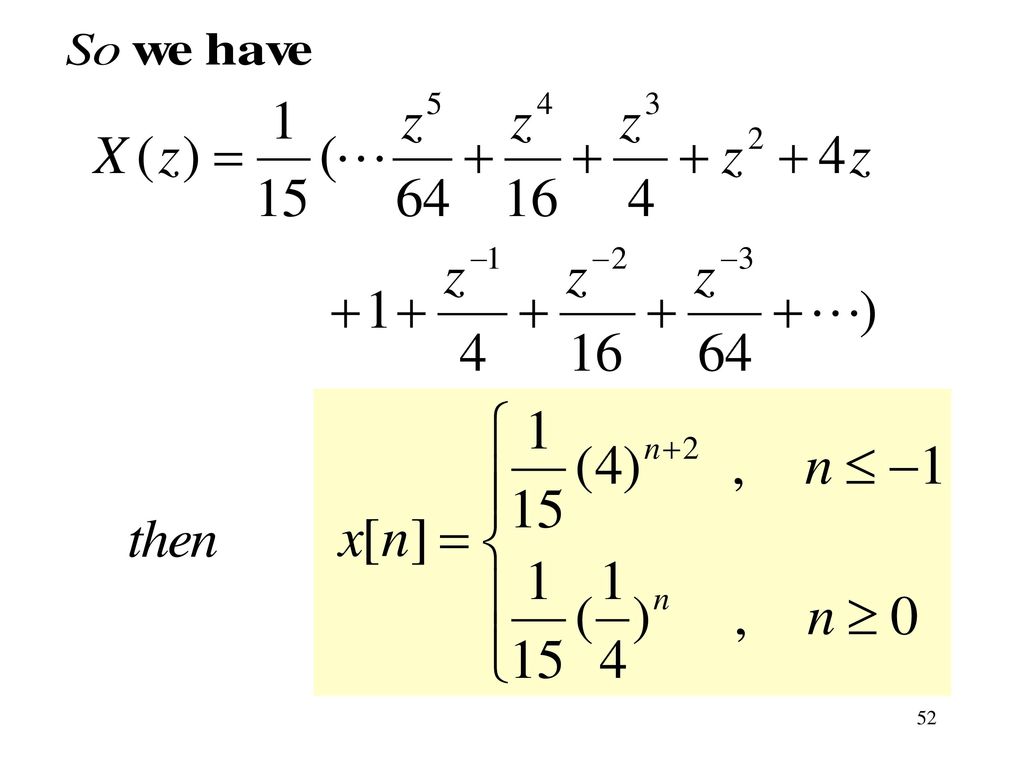
*双边序列可分解为因果序列和左边序列。*应先展成部分分式再做除法。
Example3.3.5 determine the inverse z transform of X(z) with long division. two-sided seq. Solution: Because the long division can only be used in the case of one-sided sequences, we have to divide X(z) in 2 parts. 收敛域为环状,极点z=1/4对应因果序列,极点z=4对应左边序列(双边序列) *双边序列可分解为因果序列和左边序列。*应先展成部分分式再做除法。 Right-sided Left-sided
 with long division. two-sided seq. Solution: Because the long division can only be used in the case of one-sided sequences, we have to divide X(z) in 2 parts. 收敛域为环状,极点z=1/4对应因果序列,极点z=4对应左边序列(双边序列) *双边序列可分解为因果序列和左边序列。*应先展成部分分式再做除法。 Right-sided. Left-sided.")
49
Left-sided Right-sided

50
Left-sided ... 4-Z) . .. 4Z+Z + —Z + —Z + —Z + 16 Z 16 Z - 4 Z 4 Z
2 4 1 3 16 5 64 ... 16 Z 16 Z - 4 Z 4 Z 4 Z - Z Z Z - — Z — Z — Z - — Z . ..

51
Z- —) Z ... — - — Z — Z Right-sided - —— Z —— Z 1 4 1+ — Z + — Z + — Z
-1 16 -2 64 -3 ... Z- — — - — Z — Z - —— Z 256 —— Z Right-sided

53
Example3.3.6 Consider the z transform Solution:
Using the power series expansion for ln(1+x), we obtain Therefore, x(n) is
, we obtain. Therefore, x(n) is.")
54
3.4 Properties of the Z-transform Z变换性质
Linearity Time-reversal Time-shift theorem Multiplication by an exponential Complex differentiation Complex conjugation Real and imaginary sequences Initial value theorem Convolution theorem Product of two sequences Parseval’s theorem Table of basic z transform

55
Linearity线性 If Then: 即满足均匀性与叠加性;*收敛域为两者重叠部分。

56
Example.3.4.1 Determine the z transform of x[n].
Solution:
![Example Determine the z transform of x[n].](http://slidesplayer.com/slide/13248416/79/images/56/Example+Determine+the+z+transform+of+x%5Bn%5D..jpg "Solution:")
57
Therefore:

58
Time-reversal时间轴翻褶 If Then: Proof:

59
Example 3.4.2 Determine the z transform of x[n].
Solution:
![Example Determine the z transform of x[n].](http://slidesplayer.com/slide/13248416/79/images/59/Example+Determine+the+z+transform+of+x%5Bn%5D..jpg "Solution:")
60
Time-shift theorem时移定理
Then:

61
Example. 3.4.3 determine the z transform of sequence x[n]=u[n]-u[n-3].
![Example determine the z transform of sequence x[n]=u[n]-u[n-3].](http://slidesplayer.com/slide/13248416/79/images/61/Example+determine+the+z+transform+of+sequence+x%5Bn%5D%3Du%5Bn%5D-u%5Bn-3%5D..jpg "Example determine the z transform of sequence x[n]=u[n]-u[n-3].")
62
Multiplication by an exponential乘指数项
If Then: Proof:

63
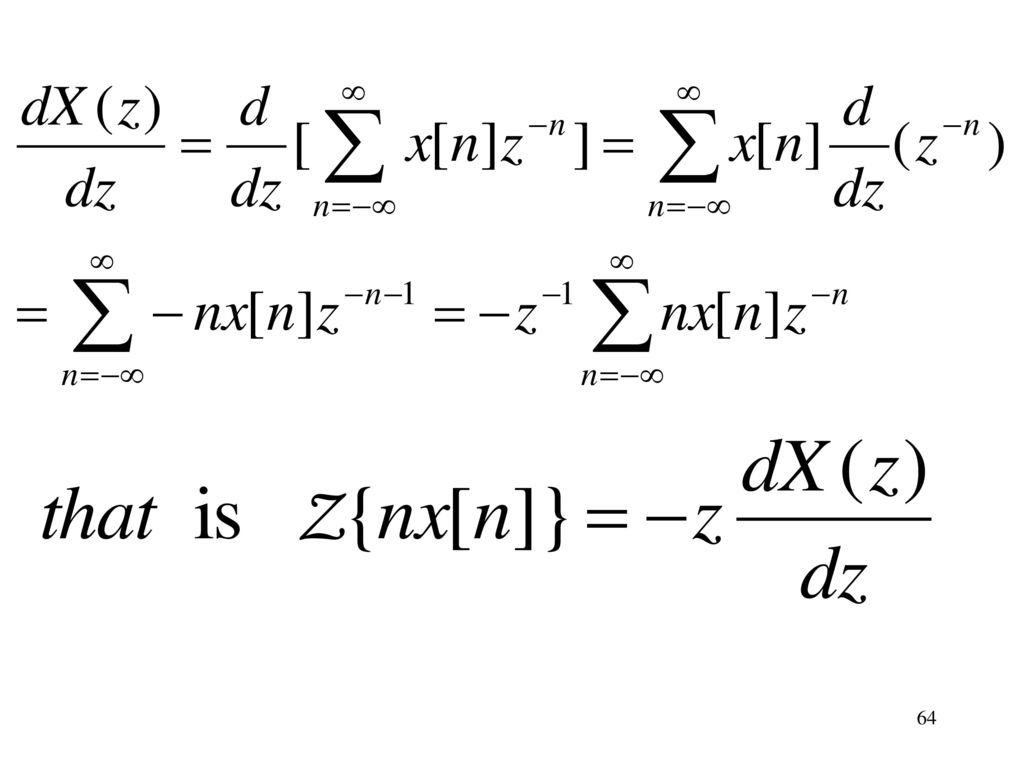
Complex differentiation复微分
Then: Proof:

65
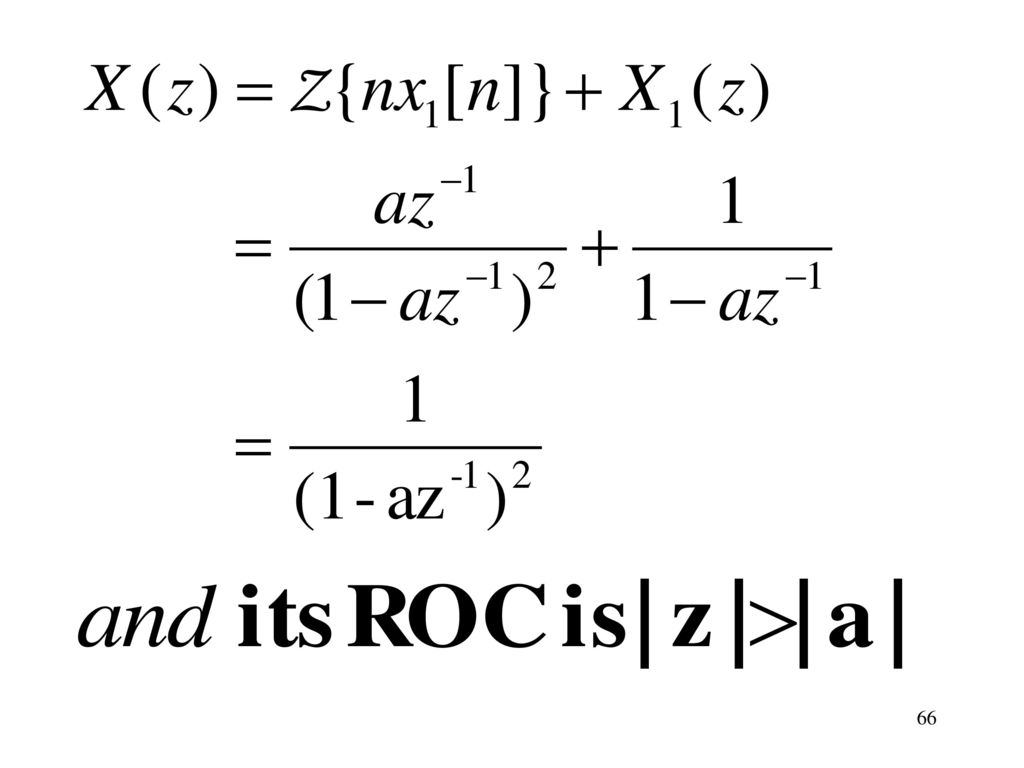
Example 3.4.4 determine the z transform of sequence x[n].
Solution:
![Example determine the z transform of sequence x[n].](http://slidesplayer.com/slide/13248416/79/images/65/Example+determine+the+z+transform+of+sequence+x%5Bn%5D..jpg "Solution:")
67
Complex conjugation复共轭
If Then: Proof:

68
Real and imaginary sequences实序列与虚序列
If Then:

69
Initial value theorem初值定理
If sequence x[n] is causal, that is x[n]=0, for n<0 , then : Proof:

70
Convolution theorem卷积定理

71
Proof:

72
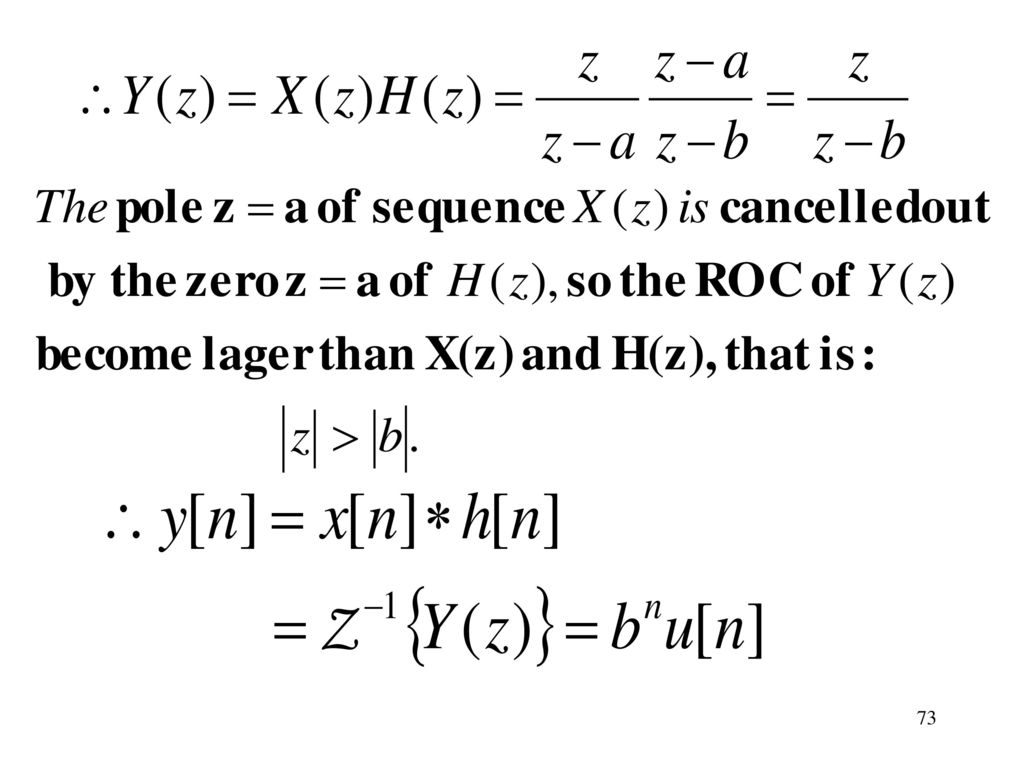
Example 3.4.5 Solution:

74
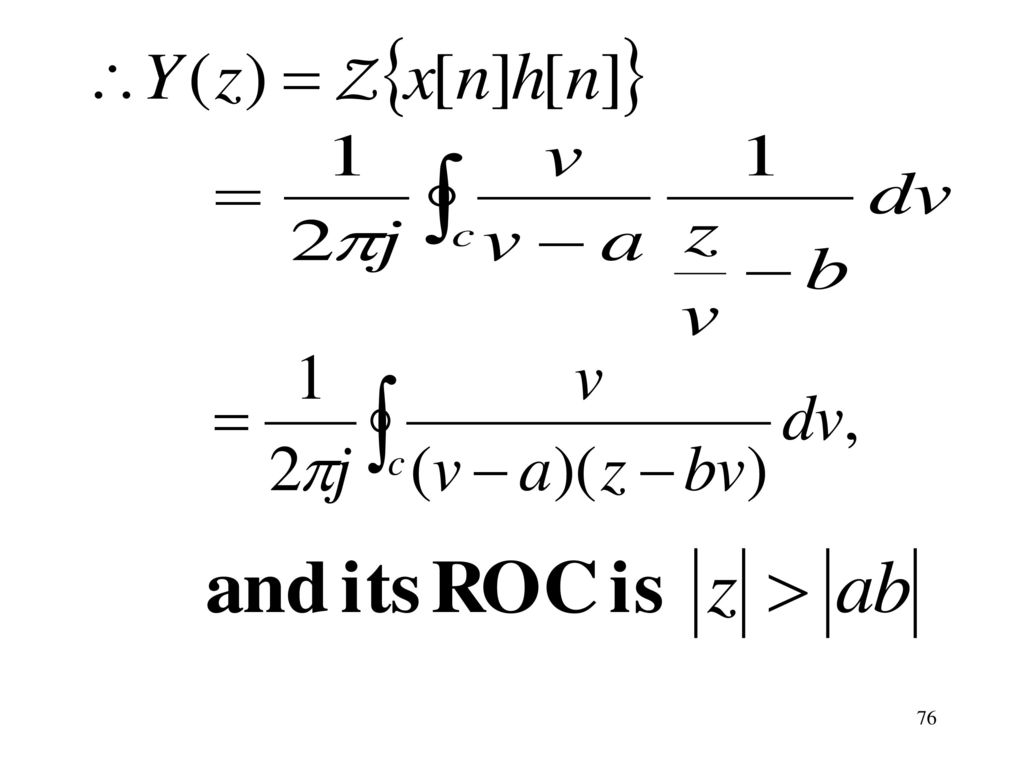
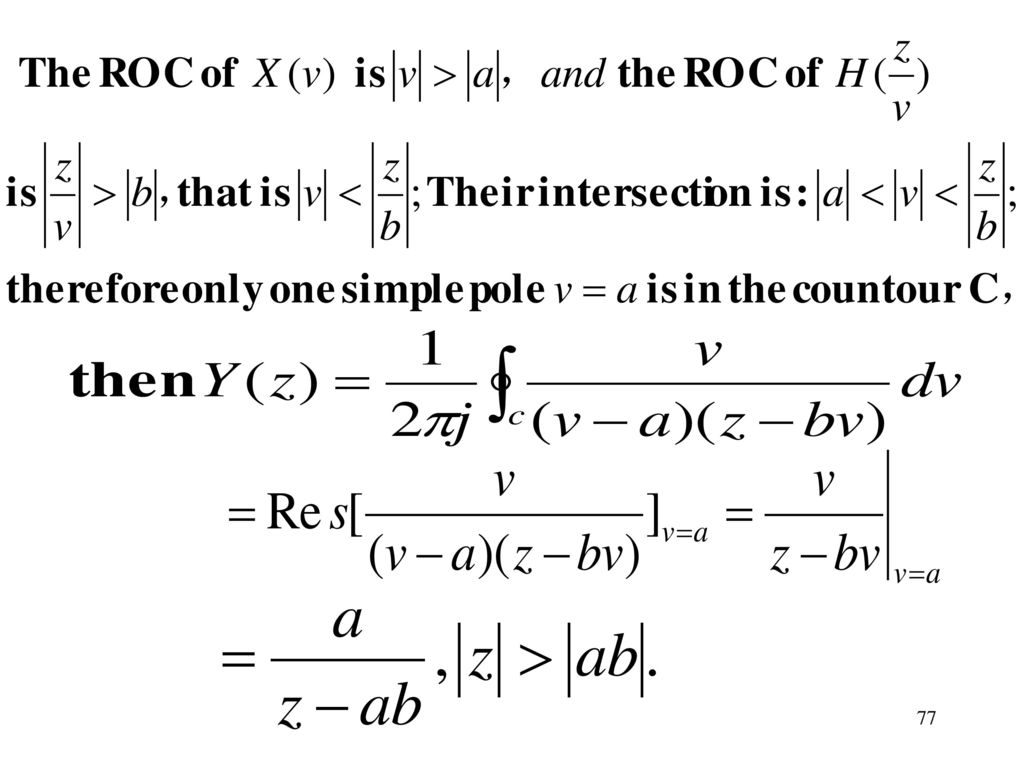
Product of two sequences两序列相乘

75
Example 3.4.6 Solution:

78
Parseval’s theorem帕塞瓦尔定理
If Then: 其中“*”表示复共轭,闭合积分围线C在公共收敛域内。

79
Notations: 结论3说明序列的能量可通过频谱求得。此即Parseval定理。

80
Table of basic z transform Properties 基本Z变换性质表
page 126 Table 3.2.

81
Summary Z transform X(z) & its ROC
Inverse Z transform & it’s computation Partial-fraction expansion部分分式展开法 Series expansion级数展开法 Polynomial division长除法 Z transform properties

82
Exercises pp b f g 3.2 b c 3.8 3.19 b 3.20 a

83
END Thank you

84
Basic knowledge for series convergence
A series of the complex variable z Suppose , Given the quantity Then Since the z-transform of a sequence is a Laurent series in the complex variable z. therefore, the properties of Laurent series apply directly to the z transform.

85
For a two-sided series If According to the general theory just mentioned, compute two quantities Then

86
For the z transform of sequence x[n] defined as
Then we can define two quantities
![For the z transform of sequence x[n] defined as](http://slidesplayer.com/slide/13248416/79/images/86/For+the+z+transform+of+sequence+x%5Bn%5D+defined+as.jpg "Then we can define two quantities.")
87
Then if a1(z)<1<a2(z), the z transform converges.
Defining

88
Therefore, the convergence condition of z transform can be expressed as
r1 < |z| < r2 Notation: For some sequences, , in these cases, the region of convergence may or may not include respectively.

90
where C is a counterclockwise closed contour.
3.3补充 The Inverse Z transform from the Cauchy integral theorem用柯西积分定理定义的Z反变换 We can get a formula for the inverse z transform from the Cauchy integral theorem, that is where C is a counterclockwise closed contour. The z transform of sequence x[n] is Very often we need to determine which sequence corresponds to a given z transform.

91
Multiply this equation with zk-1, and calculate the contour integral with the counter C,
Sequence x[n] Where C is a closed counterclockwise contour in the convergence region of X(z).
.")
92
Therefore, we get the formula for the inverse z transform as
Where C is a closed counterclockwise contour in the convergence region of X(z). c
. c.")
93
For rational z transform, its inverse z transform can obtained from the residue theorem 留数定理as following: In case F(z) is a complex function that is analytic inside a closed contour C, including the contour itself, except in a finite number of singular points pn inside C.
 is a complex function that is analytic inside a closed contour C, including the contour itself, except in a finite number of singular points pn inside C.")
94
If F(z) has a pole of multiplicity mk, i.e. F(z) can be written as
Where pk(z) is analytic at z=pk , then the residue of F(z) with respect to pk is: pk(z) is analytic at z=pk: pk(z) 在z=pk处没有极点
 is analytic at z=pk , then the residue of F(z) with respect to pk is: pk(z) is analytic at z=pk: pk(z) 在z=pk处没有极点.")
95
Then we get the formula for inverse z transform based on residue theorem.

96
For a rational z transform, we have
Where pk, with multiplicity of poles极点的阶/重数 mk, for k=1, 2, …, K, are just the poles of X(z)zn-1 that are inside the contour C.
zn-1 that are inside the contour C.")
97
Computation inverse Z transform based on residue theorem留数法求解Z反变换
When pk is the 1st order poles When pk is the mth order poles

98
Example3.3.7 Determine the inverse z transform of
c X Solution: for n≥ -1, zn+1 will not induce new poles, and because , so only one pole inside C, therefore, Pole z=4 is out of the contour C.

99
For n≥ -1, only one pole zr=1/4 inside C

100
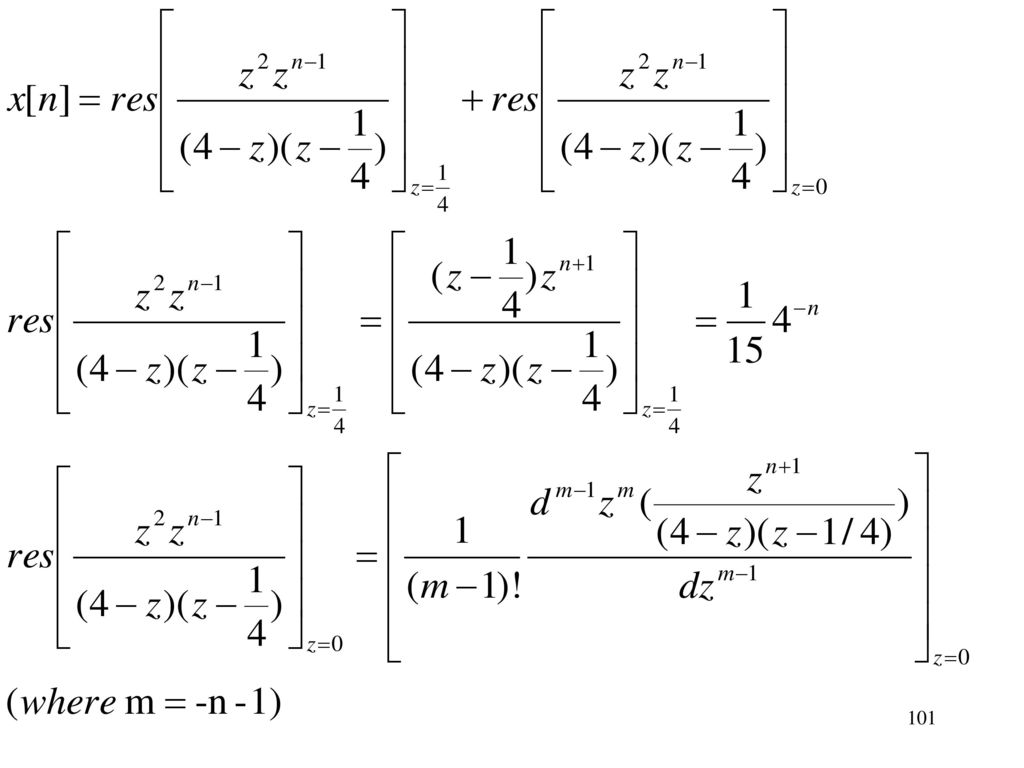
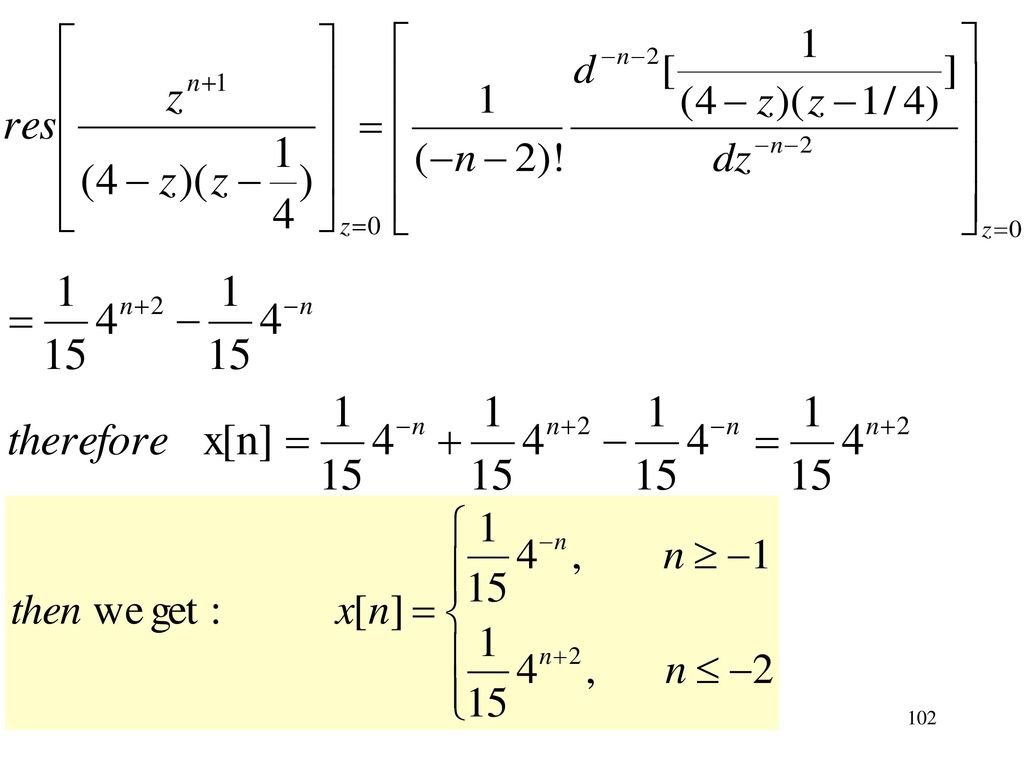
For n≤-2, zn+1 induce a pole z=0 of (-n-1)th order
. Then there are two poles inside C: z=1/4,1st order z=0, (-n-1)th order; One pole outside C: z=4(1st order). Therefore: m=-n-1
th order; One pole outside C: z=4(1st order). Therefore: m=-n-1.")
103
Simplify the computation of nth-order derivatives n重极点留数计算的简化

104
Example 3.3.8 Compute the inverse z transform of exam.3.3.7 when n≤-2

105
c X

106
Example 3.3.9 Compute x(n) for n < 0.
 for n < 0.")
Similar presentations




 他被这所学校正式录取 大桥已经落成,日内就可以正式通车 落伍 luòw ǔ 迟到 chídào 他怕迟到,六点就起床了.>")



 朝陽科技大學 資訊管理系 李麗華 教授.>")

>")
>")

, Florence,>")






