Download presentation
Presentation is loading. Please wait.

1
HSPID 使用问题交流 向立志 2007-11-28

2
内容提要 (一) HSPID 为什么 “ 不好用 ” ? (二) HSPID 的使用应注意哪些问题? (三) HSPID 的参数应如何调节? (三)从方便工程使用的角度,来讨论一下:希望把 HSPID 控制模块改进成什么样子? (四)工程人员对其它的控制模块还有什么意见和建议?
 HSPID 为什么 不好用 ? (二) HSPID 的使用应注意哪些问题? (三) HSPID 的参数应如何调节? (三)从方便工程使用的角度,来讨论一下:希望把 HSPID 控制模块改进成什么样子? (四)工程人员对其它的控制模块还有什么意见和建议?")
3
(一) HSPID 为什么 “ 不好用 ” ?
 HSPID 为什么 不好用 ?")
4
原因之一: – 与标准 PID 所采用的公式不同,调节参数与我 们平常根据标准 PID 进行调节时所使用的参数 相比,发生了一些细微的变化!

5
标准 PID 和 HSPID 的原始公式 标准 PID (完全微分 PID ): HSPID (不完全微分 PID ): – 多了一个参数 K D ,当 K D >>T D 时, HSPID 才相当于标准 PID 。
: HSPID (不完全微分 PID ): – 多了一个参数 K D ,当 K D >>T D 时, HSPID 才相当于标准 PID 。")
6
HSPID 模块结构和计算公式 PT :比例带, TI :积分时间, TD :微分时间 KD :微分增益 HSPID 是有四个调节参数的 PID 控制器

7
计算公式 完全微分(标准 PID ): 不完全微分( HSPID ): –KD 参与微分部分的计算, KD 的取值不同,微分部分的 计算结果会不同; –KD 的取值应该随 TD 的不同而发生变化, KD 一般应远 远大于 TD ,至少取 TD 的 10~100 倍,或者更大。
: 不完全微分( HSPID ): –KD 参与微分部分的计算, KD 的取值不同,微分部分的 计算结果会不同; –KD 的取值应该随 TD 的不同而发生变化, KD 一般应远 远大于 TD ,至少取 TD 的 10~100 倍,或者更大。")
8
(一) HSPID 为什么 “ 不好用 ” ? 原因之二: – 对给定值采用了滤波,增加了滤波参数 ALFA 和 RSP ,这两个参数的取值不当,会影响调节 效果的好坏。
 HSPID 为什么 不好用 ? 原因之二: – 对给定值采用了滤波,增加了滤波参数 ALFA 和 RSP ,这两个参数的取值不当,会影响调节 效果的好坏。")
9
给定值滤波

10
给定值滤波参数 RSP 的初始值为 0 ,第一次投自动的时候, 它将从 0 开始,以一定的步长,逐步变化到给定值 SP ; 不良结果:使得第一次投自动的时候,被控量向期望值 SP 的反方向运动一短暂过程,然后才逐渐返回到期望值。

11
(一) HSPID 为什么 “ 不好用 ” ? 原因之三: – 程序结构复杂,运行模式多样,参数设置相对 繁琐,容易使人感觉混淆不清!
 HSPID 为什么 不好用 ? 原因之三: – 程序结构复杂,运行模式多样,参数设置相对 繁琐,容易使人感觉混淆不清!")
12
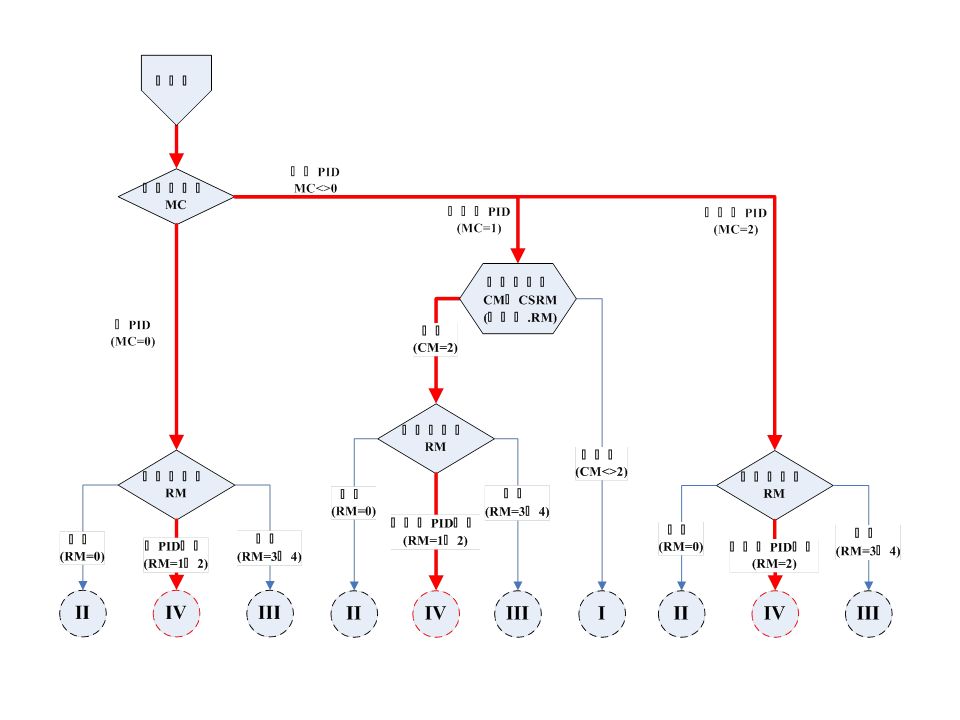
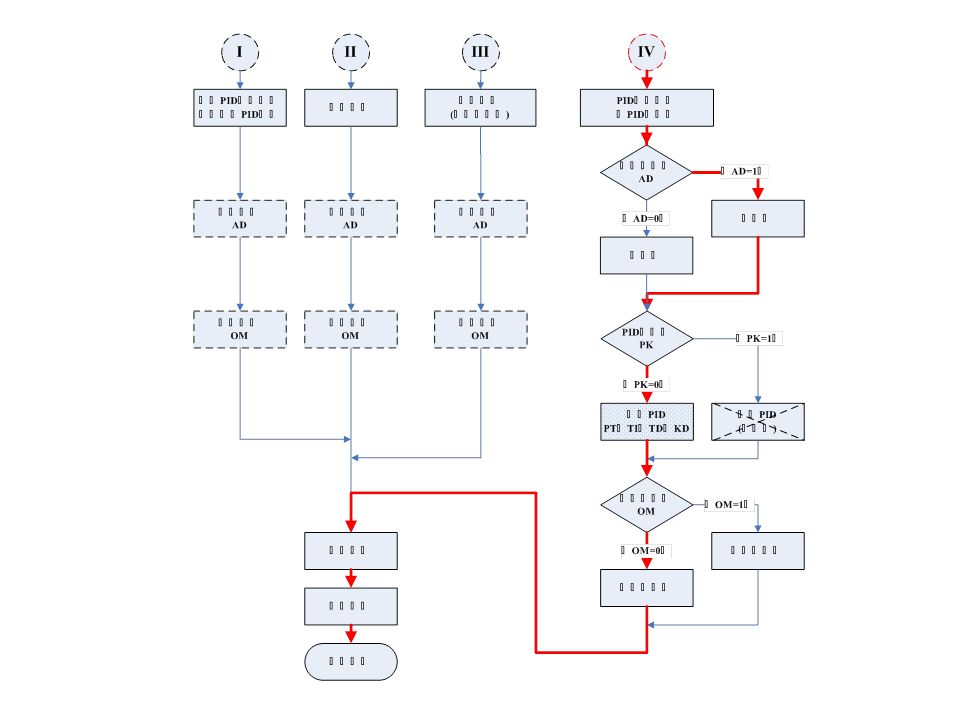
程序流程图

15
运行方式 单 PID ( MC=0 ) – 手动: RM=0 – 自动: RM=1 或 2 – 跟踪: RM=3 或 4 串级 PID ( MC<>0 ) – 串级副 PID ( MC=2 ) 手动: RM=0 自动: RM=2 跟踪: RM=3 或 4 – 串级主 PID ( MC=1 ) 手动: RM=0,CM 或 CSRM (串级副 PID.RM ) =2 自动: RM=1 或 2,CM 或 CSRM (串级副 PID.RM ) =2 跟踪: RM=3 或 4,CM 或 CSRM (串级副 PID.RM ) =2 非自动: RM 任意, CM=CSRM (串级副 PID.RM ) <>2
 – 手动: RM=0 – 自动: RM=1 或 2 – 跟踪: RM=3 或 4 串级 PID ( MC<>0 ) – 串级副 PID ( MC=2 ) 手动: RM=0 自动: RM=2 跟踪: RM=3 或 4 – 串级主 PID ( MC=1 ) 手动: RM=0,CM 或 CSRM (串级副 PID.RM ) =2 自动: RM=1 或 2,CM 或 CSRM (串级副 PID.RM ) =2 跟踪: RM=3 或 4,CM 或 CSRM (串级副 PID.RM ) =2 非自动: RM 任意, CM=CSRM (串级副 PID.RM ) <>2")
16
(二) HSPID 的使用应该注意哪些 问题?
 HSPID 的使用应该注意哪些 问题?")
17
1 )作用方式( AD ) 反作用:进水阀控制水缸中的水位属于反作用, – 当水缸中的水位高于给定值时,控制器需减小进水阀 门的开度来降低水位到给定位置,所以称为反作用。 正作用:出水阀控制水缸中的水位属于正作用。 – 当水缸中的水位高于给定值时,控制器需增大出水阀 门的开度来降低水位到给定位置,所以称为正作用。
作用方式( AD ) 反作用:进水阀控制水缸中的水位属于反作用, – 当水缸中的水位高于给定值时,控制器需减小进水阀 门的开度来降低水位到给定位置,所以称为反作用。 正作用:出水阀控制水缸中的水位属于正作用。 – 当水缸中的水位高于给定值时,控制器需增大出水阀 门的开度来降低水位到给定位置,所以称为正作用。")
18
2 )量程上下限 控制量的量程上下限( MU , MD ) 过程被控量的量程上下限( PVMU , PVMD ) 量程转换
量程上下限 控制量的量程上下限( MU , MD ) 过程被控量的量程上下限( PVMU , PVMD ) 量程转换")
19
3 )输出模式 (OutM 或 OM) 位置式输出:用于位置型的控制机构,如阀门等 增量式输出:用于递进式的控制机构,如步进电 机等。
输出模式 (OutM 或 OM) 位置式输出:用于位置型的控制机构,如阀门等 增量式输出:用于递进式的控制机构,如步进电 机等。")
20
4 )输出变化率限制( OutR ) 每次输出发生变化的大小不能超过输出变化 率的限值 OutR ,防止变化过快造成不良后果。 – 位置式 – 增量式
输出变化率限制( OutR ) 每次输出发生变化的大小不能超过输出变化 率的限值 OutR ,防止变化过快造成不良后果。 – 位置式 – 增量式")
21
(二) HSPID 的使用应该注意哪些 问题? 5 )输出幅值限制 – 输出上限( OutT ):不允许超过上限 – 输出下限( OutB ):不允许超过下限
 HSPID 的使用应该注意哪些 问题? 5 )输出幅值限制 – 输出上限( OutT ):不允许超过上限 – 输出下限( OutB ):不允许超过下限")
22
(二) HSPID 的使用应该注意哪些 问题? 6 )控制周期( CP 或 cycle ) – 控制周期与反应对象有关,根据具体对象进行选择; – 控制周期( CP 或 cycle )在控制算法中作为参数参与计 算,控制周期设置的不同,计算结果也不同。
 HSPID 的使用应该注意哪些 问题? 6 )控制周期( CP 或 cycle ) – 控制周期与反应对象有关,根据具体对象进行选择; – 控制周期( CP 或 cycle )在控制算法中作为参数参与计 算,控制周期设置的不同,计算结果也不同。")
23
(三) HSPID 的参数应如何调节?
 HSPID 的参数应如何调节?")
24
单回路 PID 控制 仿真过程对象:一阶惯性 + 滞后

25
PID 参数调节的试凑法 首先调整比例作用:由小到大反复调节比例带 PT , 使被控曲线没有明显震荡,超调足够小,响应相 对较快; 然后调整积分作用:由大到小反复调节积分时间 TI ,使被控曲线尽快向给定的期望值靠近,即尽 快减小静差,直至消除静差; 最后调整微分作用:先将微分增益 KD 设得尽量大 ( 1000 , 10000 等),保证 KD>>TD 成立,再由小 到大反复调节微分时间 TD ,消除干扰,直至达到 满意效果。
,保证 KD>>TD 成立,再由小 到大反复调节微分时间 TD ,消除干扰,直至达到 满意效果。")
26
PID 调节的工程经验参数 (张洪垠老师:谈如何整定 PID 参数) 被调参数比例度 % 积分时间 min 微分时间 min 流量 100~3000.1~1 温度 100~2003~300.5~3 压力 100~3000.4~3 液位 80~200
 被调参数比例度 % 积分时间 min 微分时间 min 流量 100~3000.1~1 温度 100~2003~300.5~3 压力 100~3000.4~3 液位 80~200")
27
串级 PID 控制 加热炉温度控制

28
串级 PID 控制 仿真过程对象: – 温度与煤气流量之间的传递函数:一阶惯性 + 滞后 – 煤气流量与阀门开度之间的传递函数:二阶惯性

29
串级 PID 控制 两种方式 –1 )同步串级方式 主回路的控制周期与副回路相同 –2 )异步串级方式 主回路的控制周期与副回路不同,主回路的响应比 副回路满,控制周期比副回路长,一般取副回路控 制周期的整数倍,如 4~5 倍。 调整顺序 – 先调整副回路,后调整主回路
同步串级方式 主回路的控制周期与副回路相同 –2 )异步串级方式 主回路的控制周期与副回路不同,主回路的响应比 副回路满,控制周期比副回路长,一般取副回路控 制周期的整数倍,如 4~5 倍。 调整顺序 – 先调整副回路,后调整主回路")
30
(四)从方便工程使用的角度, 讨论一下:希望把 HSPID 控制模 块改进成什么样子?
从方便工程使用的角度, 讨论一下:希望把 HSPID 控制模 块改进成什么样子?")
31
希望作改进吗? ( 各位的意见 ) 1 )是否需要把算法改回标准的 PID , 4 参数改回 3 参数? 2 )是否把模块拆分,做成多种 PID 控制器? – 模式太多:手动、自动、自动跟踪、手动跟踪、串级主、串级副 – 设定值滤波(逐步变化)是否必要 3 )希望封装成什么样子? 4 ) ……
 1 )是否需要把算法改回标准的 PID , 4 参数改回 3 参数? 2 )是否把模块拆分,做成多种 PID 控制器? – 模式太多:手动、自动、自动跟踪、手动跟踪、串级主、串级副 – 设定值滤波(逐步变化)是否必要 3 )希望封装成什么样子? 4 ) ……")
32
(五)对其它的控制模块还有什么 意见和建议?
对其它的控制模块还有什么 意见和建议?")
33
谢谢!

Similar presentations

 装配 后调整检测.>")







 *** 20**年**月**日.>")









