Download presentation
Presentation is loading. Please wait.

1
要功能的重要环节,其动力源 (电动式、气动 式、液动式或综合式)应根据整个系统的具体技 术要求而定。驱动装置要快速完成预期的动作,
4 动力驱动及定位 4.1 动力驱动装置分析 驱动装置的技术特点 机电一体化系统的驱动装置,是实现系统主 要功能的重要环节,其动力源 (电动式、气动 式、液动式或综合式)应根据整个系统的具体技 术要求而定。驱动装置要快速完成预期的动作, 相应速度要快,动态性能好,此外,动作灵敏度
应根据整个系统的具体技. 术要求而定。驱动装置要快速完成预期的动作, 相应速度要快,动态性能好,此外,动作灵敏度.")
2
要高,便于集中控制。因此应具备效率高,体积
小,重量轻,自控性强,可靠性高等技术特点。 当前,驱动机构正朝标准化,系列化和智能化方 向发展。

3
入量(即把物料、能量信息(指令))在一定空间和 时间条件下,完成所希望的转化效应(输出量), 则要求执行装置能经济有效地达到主要性能指 标:
驱动装置的技术要求 为了更好地达到系统目标,把完全确定的输 入量(即把物料、能量信息(指令))在一定空间和 时间条件下,完成所希望的转化效应(输出量), 则要求执行装置能经济有效地达到主要性能指 标: 精度、稳定度、响应速度和可靠性。
)在一定空间和. 时间条件下,完成所希望的转化效应(输出量), 则要求执行装置能经济有效地达到主要性能指. 标: 精度、稳定度、响应速度和可靠性。")
4
传动误差和回程误差对控制系统性能的影响,按 其在系统中所处位置不同有所差异。如图4.1示
精度对于系统中的装置要求 其传动精度和定位精度要高,传动系统中的 传动误差和回程误差对控制系统性能的影响,按 其在系统中所处位置不同有所差异。如图4.1示

5
伺服带宽以内低频分量和伺服带宽以外高频分 量。闭环前的传动链G1的传动误差低频分量影响 伺服精度,而高频分量无影响。G2的传动误差高
一般传动误差可视为两部分组成:低频分量 伺服带宽以内低频分量和伺服带宽以外高频分 量。闭环前的传动链G1的传动误差低频分量影响 伺服精度,而高频分量无影响。G2的传动误差高 频分量影响伺服精度,低频分量无影响。对于反 馈回路上的G3与G1类似。闭环后的 G4,其传动 误差量均影响数据的传递精度。 对于闭环前的传动链G1,回程误差将影响伺

6
服精度,而G2的回程误差不影响伺服精度,但稳
服系统中的传动链误差的低频分量和高频分量对 伺服精度的影响不同,因此必须对传动误差进行 频谱分析。 在线性控制系统中,定位精度与快速响应两 者之间有相互矛盾的特性。

7
图4.2示为位置控制系统图,描述两者之间的定量关系。
图4.2 位置控制系统框图

8
该系统的输入输出的传递函数 G(S) , 由下式表示 (4.1)
 , 由下式表示 (4.1)")
9
式中 — 固有频率( S-1 ) ; — 阻尼比; T v — 时间常数 ( S ) ; TP —系统回路增益 ( S-1 ) ;
 ; — 阻尼比; T v — 时间常数 ( S ) ; TP —系统回路增益 ( S-1 ) ;")
10
对于阶跃输入的响应 (4.2a) (4.2b) (4.2c)
 (4.2b) (4.2c)")
11
图4.3所示为不产生超调时,整定后的临界控制 状态 ζ=1 时的残余偏差(残差)与基准时间ωnt 关系曲线。由图可知,输入量为偏差,当残差为 0.01rad时,所达到的时刻 ωnt ≈65,求出控制参 数 K p 、T v 值,不难计算出该值变换后的实际时 间。当K p=50s-1 ,T v =0.002s时,则实际时间

12
若达到高精度同时 减小定位时间,则必须 提高系统的固有频率ωn。 增大ωn 就要提高 KP , 降低TV ,提高系统的 增益。但是,对执行
机构或电动机,因共 振或磨损等因素, 图4.3偏差与定位时间

13
阻止提高系统的增益。由于存在摩擦阻力和磨
损,又影响速度和精度两者同时达到理想效果。 若同时实现位置控制的高速化和高精度,要考虑 各环节以及整个系统的控制形式,并加以实施。 执行结构中的传动部分要消除磨损,间隙, 变形等,摩擦阻力要尽量低,同时各个部分结构 要合理配置。

14
关,要提高系统的抗震性,就必须增大执行装置 的固有频率,一般不应低于50~100,并需提高系 统的阻尼能力。
稳定性 稳定性与振动,热效应以及其他环境因素有 关,要提高系统的抗震性,就必须增大执行装置 的固有频率,一般不应低于50~100,并需提高系 统的阻尼能力。 在机电一体化系统中,执行装置一般处于回 路之内(图4.4),其结构、固有频率和回程误差 将影响系统的稳定性,而传动误差的低频分量
,其结构、固有频率和回程误差. 将影响系统的稳定性,而传动误差的低频分量.")
15
(指频率低于伺服带宽的那部分传动误差)就可得
到校正。 对图4.4所示的开环系统,无检测装置,不 对过程位置进行检查和反馈,执行装置的传动误 差和回程误差直接影响整个系统的精度,但不存 在稳定性问题。

16
图4.4 控制系统中的执行装置 (a)闭环控制系统 (b)开环控制系统
闭环控制系统 (b)开环控制系统")
17
J∑ M ——所有传动件的转动惯性折算到输出轴上值 K ——系统的开环传递函数 K=k t k D / it
系统的稳定性还取决于系统的相对阻尼系数,它与执行装置的力矩放大系数有关。闭环系统的相对阻尼系数为: 式中 δ ——粘性阻尼系数 J∑ M ——所有传动件的转动惯性折算到输出轴上值 K ——系统的开环传递函数 K=k t k D / it

18
it 的大小对控制系统性能有一定影响,既要 考虑对系统稳定性、精确性、快速性的影响,也 要考虑对执行元件与负载的最佳频率匹配问题。
式中 k t —执行装置之前的系统各环节传递系数 k D ——执行装置的力矩放大系数; It ——执行装置的总转速比。 it 的大小对控制系统性能有一定影响,既要 考虑对系统稳定性、精确性、快速性的影响,也 要考虑对执行元件与负载的最佳频率匹配问题。 选择较大的 it ,可使系统的相对阻尼系数增大, 有利于系统的稳定性。低速时,摩擦不稳定,造

19
成低速爬行,加大 i t ,伺服电机的转速就相对
提高,从而可避免爬行现象。 转速比 it 选择偏大,造成传动系数增大,结 构不紧凑,传动精度、效率、刚度与结构的固有 频率降低,可能使输出轴得不到所需峰值转速。 一般,总转速比的数值,不宜超过伺服电机的额 定转速与负载峰值转速比。

20
角加速度,就必须提高伺服电机的输出转矩,减 小摩擦阻力,减小电机和负载的转动惯量,提高 传动效率。 4.1.2.4 可靠性
响应速度 响应速度主要取决与系统的加速度。要提高 角加速度,就必须提高伺服电机的输出转矩,减 小摩擦阻力,减小电机和负载的转动惯量,提高 传动效率。 可靠性 可靠性、抗干扰性和运行安全性是确定机电 一体化系统的使用价值和使用效能的主要技术指

21
标。机电一体化系统的基本特征是能自动地完成
能量变换和对信息的处理与控制。在系统中具有 很低能量水平的自动化信息处理装置(控制和调 节装置,微型计算机),常常同强功率的电气装 置(如电磁铁、电动机、整流器等)装在一个紧 密的有限空间内运行,原理上给系统造成电气扰 动的影响,在元件间或系统间产生有害电气相互 作用。这可能是由寄生电位,电容或电感耦合产
,常常同强功率的电气装. 置(如电磁铁、电动机、整流器等)装在一个紧. 密的有限空间内运行,原理上给系统造成电气扰. 动的影响,在元件间或系统间产生有害电气相互. 作用。这可能是由寄生电位,电容或电感耦合产.")
22
生的,或者由系统元件固有的非线形特性(集肤 效应、信号导线上的发射现象、颤动过程等)引 起的。 机电一体化系统都是可修理的系统。系统可
靠性用持续可用性来表示 (4.3)
")
23
效,整个系统停止工作),且有恒定的元件故障 率,则
式中 T—系统有工作能力时间,即平均停机 时间间隔时间; —平均停机时间 假设系统为串联系统(只要其中一个元件失 效,整个系统停止工作),且有恒定的元件故障 率,则 (4.4)
,且有恒定的元件故障. 率,则. (4.4)")
24
尽可能高。因此,执行装置作为系统,其元件故 障率要尽量小,各元件应实现合理的结构布置并 采取有效保护措施,以防止化学、机械、电、热
式中 λ ——第个系统元件的故障率, n ——系统元件数目 为了使(4.3)有很高的数值,必须使 T 值 尽可能高。因此,执行装置作为系统,其元件故 障率要尽量小,各元件应实现合理的结构布置并 采取有效保护措施,以防止化学、机械、电、热 等方面的过载荷,使元件受到影响。有时使系统 元件在欠载荷下运行,来保证系统正常或完全可
有很高的数值,必须使 T 值. 尽可能高。因此,执行装置作为系统,其元件故. 障率要尽量小,各元件应实现合理的结构布置并. 采取有效保护措施,以防止化学、机械、电、热. 等方面的过载荷,使元件受到影响。有时使系统. 元件在欠载荷下运行,来保证系统正常或完全可.")
25
靠的运行。 由于执行装置的工作情况千差万别,所承受 载荷大小也多种多样,因此载荷的综合视具体情 况而定,一般作用在执行装置上的载荷,主要有 工作载荷、惯性载荷、摩擦载荷,它们的综合, 通常采用峰值综合和均值综合两种方法。

26
和阻尼程度等是对系统最基本的要求,通常它们 是通过系统输入特定信号的过渡过程和稳态值来 表示的。 这些品质指标是比较各种方案优劣以及制定
4.1.3 系统的品质 工作稳定性,精确性(稳态精度),快速性 和阻尼程度等是对系统最基本的要求,通常它们 是通过系统输入特定信号的过渡过程和稳态值来 表示的。 这些品质指标是比较各种方案优劣以及制定 产品协议的基础,是检验最佳化的尺度,一般是 按实际要求由实验方法确定的。
,快速性. 和阻尼程度等是对系统最基本的要求,通常它们. 是通过系统输入特定信号的过渡过程和稳态值来. 表示的。 这些品质指标是比较各种方案优劣以及制定. 产品协议的基础,是检验最佳化的尺度,一般是. 按实际要求由实验方法确定的。")
27
统的被控制量,在受到控制量或扰动量作用时, 由原来的平衡状态(或稳态)变化到新的平衡态的 过程。 图4.5示为单位阶跃信号作用下控制系统的
过渡过程表征了系统的动态性能,它是指系 统的被控制量,在受到控制量或扰动量作用时, 由原来的平衡状态(或稳态)变化到新的平衡态的 过程。 图4.5示为单位阶跃信号作用下控制系统的 过渡过程曲线 C(t) 。曲线(1)振荡收敛,系统 稳定;曲线(2)单调收敛,系统稳定;曲线 (3)振荡发散,系统不稳定;曲线(4)单调
变化到新的平衡态的. 过程。 图4.5示为单位阶跃信号作用下控制系统的. 过渡过程曲线 C(t) 。曲线(1)振荡收敛,系统. 稳定;曲线(2)单调收敛,系统稳定;曲线. (3)振荡发散,系统不稳定;曲线(4)单调.")
28
发散,系统不 稳定。稳定性 是系统自身的 固有特性,也 是系统能正常 工作的首要条 件。 图4.5 过渡过程曲线

29
下过渡过程一般形式。通常,希望二阶系统工作 在 ξ=0.4~0.8 的欠阻尼状态态。在这种状态 下,将有一个振荡特性适度、持续时间较短的过
系统的品质指标 图4.6 所示为二阶系统在单位阶跃信号作用 下过渡过程一般形式。通常,希望二阶系统工作 在 ξ=0.4~0.8 的欠阻尼状态态。在这种状态 下,将有一个振荡特性适度、持续时间较短的过 渡过程,但并不排除在某些情况下需要采用过阻 尼或临界阻尼状态。 二阶系统(图4.6)在欠阻尼状下,用阶跃
在欠阻尼状下,用阶跃.")
30
响应的特征值来表征系统的品质指标。 (1)稳态误差 被控制信号的期望值C(t)与稳态值C(∞)之差 称为稳态误差。它是系统控制精度的一种度量方 法,是由于系统不能很好地跟踪输入信号而引起 的原理性误差。 若系统中执行装置的元器件不完善,如静摩 擦、间隙或放大器的零点漂移,元件老化或变质

31
等,都会造成系统的误差,称为静差。稳态误差
和静差是表征系统稳态精度的一项性能指标。利 用误差系数,可方便地求出稳态误差。误差系数 可通过对误差传递函数求导或用查表法求出 。 (2)上升时间 t r 对于欠阻尼二阶系统,过渡过程曲线从零上 升到100%稳态值所需时间称为上升时间 t r 。 对于过阻尼系统,把过渡过程曲线从稳态值
上升时间 t r. 对于欠阻尼二阶系统,过渡过程曲线从零上. 升到100%稳态值所需时间称为上升时间 t r 。 对于过阻尼系统,把过渡过程曲线从稳态值.")
32
(3)峰值时间 tp 过渡过程曲线 达到第一个峰值所 需时间称为峰值时 间 tp 图4.6 单位阶跃信号作用 下的过渡过程
的10%上升到90%所需时间称为上升时间 t r 。 (3)峰值时间 tp 过渡过程曲线 达到第一个峰值所 需时间称为峰值时 间 tp 图4.6 单位阶跃信号作用 下的过渡过程
峰值时间 tp. 过渡过程曲线. 达到第一个峰值所. 需时间称为峰值时. 间 tp. 图4.6. 单位阶跃信号作用. 下的过渡过程.")
33
图4.6中曲线 C(t)是一条衰减的正弦曲线,其振荡程度用超调量 σ来描述
(4)最大超调量σ 图4.6中曲线 C(t)是一条衰减的正弦曲线,其振荡程度用超调量 σ来描述 式中 C (t p) ——过渡过程曲线 C(t) 第一次达到的最大输出值; C(∞)——过渡过程的稳定值。 (4.5)
最大超调量σ. 图4.6中曲线 C(t)是一条衰减的正弦曲线,其振荡程度用超调量 σ来描述. 式中 C (t p) ——过渡过程曲线 C(t) 第一次达到的最大输出值; C(∞)——过渡过程的稳定值。 (4.5)")
34
(5)过渡过程时间 ts 若t ≥ ts时,有 ︳C (t)- C(∞) ︳≤△ ,则 定义为过渡过程时间。用稳态值的百分数△表示 允许误差范围(一般△=5% 或△=2% ),这 样过渡过程曲线达到并永远保持在 △范围内所 需时间即为 t s (或称调节时间)。Ts 的大小表征 控制系统反映输入信号的快速性。
。Ts 的大小表征. 控制系统反映输入信号的快速性。")
35
(6)振荡次数 N 在时间 0≤t≤ts 内,过渡过程曲线C(t)穿越 其稳态值 C(∞) 次数的一半称振荡次数。它也是 反映系统阻尼特性的一个特征值,N 越小系统的 阻尼性能越好。 ts 、tp 、σ和 N 称为控制系统的动态品质指 标,其中ts和tp表征系统的快速性能,σ表征系统 的阻尼性能。设计一个机电一体化系统,其中执

36
行装置作为子系统,既要保持系统的稳定性和稳 态精度,又要满足动态品质指标的要求,这是一 项必须实现的基本任务。
单位阶跃响应的特征量计算 (1) 二阶系统的阶跃响应 由式(4.1)求得二阶系统在单位阶跃函数 作用下输出信号的拉氏变换,即 (4.6)
 二阶系统的阶跃响应. 由式(4.1)求得二阶系统在单位阶跃函数. 作用下输出信号的拉氏变换,即. (4.6)")
37
C(t)为衰减正弦振荡曲线,衰减速度取决于ξωn 值的大小,衰减振荡频率(有阻尼自振频率) 。可见,衰减振荡周期
对上式进行拉氏变换得 C(t) =L﹣1[C(S)] 显然,由式看出,对于0<ξ<1的过渡过程 C(t)为衰减正弦振荡曲线,衰减速度取决于ξωn 值的大小,衰减振荡频率(有阻尼自振频率) 。可见,衰减振荡周期 。将ξ=0代入系统阶跃响应式, 得 C(t) =1- cosωnt (t≥0) ,
 =L﹣1[C(S)] 显然,由式看出,对于0<ξ<1的过渡过程. C(t)为衰减正弦振荡曲线,衰减速度取决于ξωn. 值的大小,衰减振荡频率(有阻尼自振频率) 。可见,衰减振荡周期. 。将ξ=0代入系统阶跃响应式, 得 C(t) =1- cosωnt (t≥0) ,")
38
这是欠阻尼的一种特殊情况。其阶跃响应是等幅
正弦振荡。显然,ωd < ωn ,且随ξ 值增大 ωd 值将减小。 (2)上升时间 tr 的计算 根据定义,当t=tr 时,将式(4.6)展开, 并进行拉氏反变换得
上升时间 tr 的计算. 根据定义,当t=tr 时,将式(4.6)展开, 并进行拉氏反变换得.")
39
即 因 故 或

40
由图4.7得 因此,上升时间为 式中

41
最大超调量σ的计算 由定义得 (4.8)
")
42
(4)峰值时间tp的计算 将式(4.2a)对时间求导,并令 经整理后得 将上式变换为 所以
峰值时间tp的计算 将式(4.2a)对时间求导,并令 经整理后得 将上式变换为 所以")
43
个峰值所对应的时间,因此ωdtp=π。故
由于峰值时间 t p 是过渡过程 C (t) 在到第一 个峰值所对应的时间,因此ωdtp=π。故 (5)过渡过程时间ts的计算 按式(4.2a)以及ts定义,可近似认为 (4.9)
 在到第一. 个峰值所对应的时间,因此ωdtp=π。故. (5)过渡过程时间ts的计算. 按式(4.2a)以及ts定义,可近似认为. (4.9)")
44
则 若取△=5% ,且忽略 项(0<ξ<0.9) 时,则 (4.10)
 时,则 (4.10)")
45
均与阻尼比ξ和无阻尼自振频率ωn有关,而 σ只是阻尼比ξ的函数,与ωn无关。当系统阻 尼比ξ确定后,可求得对应的σ。反之,σ已
若取 △=2% ,且忽略 项, 则 从式(4.7)、式(4.8)、式(4.9)、 式(4.10)、式(4.11)得知,tr 、tp 、ts 均与阻尼比ξ和无阻尼自振频率ωn有关,而 σ只是阻尼比ξ的函数,与ωn无关。当系统阻 尼比ξ确定后,可求得对应的σ。反之,σ已 (4.11)
、式(4.8)、式(4.9)、 式(4.10)、式(4.11)得知,tr 、tp 、ts. 均与阻尼比ξ和无阻尼自振频率ωn有关,而. σ只是阻尼比ξ的函数,与ωn无关。当系统阻. 尼比ξ确定后,可求得对应的σ。反之,σ已. (4.11)")
46
ξ值小(ξ <0.4) ,将造成系统过渡过程严重超调; ξ值大(ξ >0.8) ,将使系统的调节时间变得缓慢。
知,也可求出相应的阻尼比ζ的数值。 图4.8 给出了σ与ξ的关系曲线。一般为 获得良好的过渡过程,阻尼比ξ = 0.4~0.8 为 宜,相应的σ=2.5%~25% 。 ξ值小(ξ <0.4) ,将造成系统过渡过程严重超调; ξ值大(ξ >0.8) ,将使系统的调节时间变得缓慢。
 ,将造成系统过渡过程严重超调; ξ值大(ξ >0.8) ,将使系统的调节时间变得缓慢。")
47
程时间 ts ( tr •tp ),可主要根据ωn 来确定,即在不 改变σ情况下,调整ωn 改变系统快速性。
通常,阻尼比ξ根据σ的要求而定,过渡过 程时间 ts ( tr •tp ),可主要根据ωn 来确定,即在不 改变σ情况下,调整ωn 改变系统快速性。
,可主要根据ωn 来确定,即在不. 改变σ情况下,调整ωn 改变系统快速性。")
48
(6)振荡次数 N 的计算 式中 当△ =2% 时, ,则 (4.12)
振荡次数 N 的计算 式中 当△ =2% 时, ,则 (4.12)")
49
当 △=5% 时, ,则 若已知 即 , (4.13)
")
50
可见,振荡次数 N 只与 ξ有关,其关系曲线如图4.9示
则 (△=2%) (△=5%) 可见,振荡次数 N 只与 ξ有关,其关系曲线如图4.9示 (4.14) (4.15)
 (△=5%) 可见,振荡次数 N 只与 ξ有关,其关系曲线如图4.9示. (4.14) (4.15)")
51
图4.8 δ与ξ关系曲线

52
图4.9振荡次数N与ξ关系的曲线

53
频率特性法的品质指标 在工程上,通常传动系统的设计多采用频率 特性法,系统品质指标应当用频率特性来表示。 (1)开环系统频率特性的主要品质指标(图4.10) 1)频率ω=0 时放大系数V0,表征系统的精度。 2)穿越频率ωd(对数幅频特性通过横轴时的频 率),表征系统的快速性。 3)穿越频率处的相位裕量γ相频特性在ωd 处相
穿越频率ωd(对数幅频特性通过横轴时的频. 率),表征系统的快速性。 3)穿越频率处的相位裕量γ相频特性在ωd 处相.")
54
距-1800的相位差),表征系统的振荡特性。 (2)闭环系统频率特性的品质指标(图4.11) 截止频率ωg(闭环系统放大系数降到0.7频 率),该频率相当于开环系统的穿越频率。 2) 谐振频率ωm (闭环幅频特性具有最大幅值时的频率),当 γ≤630 时没有此值。 3)谐振峰值 ∣Fg∣m 谐振频率处的值,当 γ≥630 时没有此值。
,当. γ≤630 时没有此值。 3)谐振峰值 ∣Fg∣m 谐振频率处的值,当. γ≥630 时没有此值。")
55
图4.10 开环频率特性的品质指标

56
图4.11 闭环系统频率特性品质指标

57
表4.1为位置传动系统的典型品质指标参考数值 范围。例如,对于高质量CNC的进给运动,其所 有的品质指标为1级;对于无线电望远镜随动系 统,其快速性为3级,而精度则必须是1级。

58
表4.1 传动的品质指标

59
间的联系)和功能描述都可以表征系统的性能。接口通常指计算机与外部的主要联系,如图4.12所示。
能量转换接口 系统的接口 系统与外部周围联系,系统结构(系统元件 间的联系)和功能描述都可以表征系统的性能。接口通常指计算机与外部的主要联系,如图4.12所示。
和功能描述都可以表征系统的性能。接口通常指计算机与外部的主要联系,如图4.12所示。")
60
图4.12 机电一体化系统的基本结构

61
系统含有两个彼此有信息耦合的子系统;电、机
械能变量与控制,以能量为主的子系统(通常指 传动系统功率部分)和实现控制、保护检测功能 的信息处理子系统。 每一种机电一体化系统,都是根据系统元件 的工作方式及其结构实现一种确定的系统外部函 数关系:
和实现控制、保护检测功能. 的信息处理子系统。 每一种机电一体化系统,都是根据系统元件. 的工作方式及其结构实现一种确定的系统外部函. 数关系:")
62
为了能长时间稳定地复现 y 与 x 之间预期关系,则必须: 1) 选择元件性能和系统结构,不致因扰动量 d 的影响,破坏其预期关系。
y= f ( x ,d ) 式中 y ——被控制量 x ——给定量 d ——扰动量 为了能长时间稳定地复现 y 与 x 之间预期关系,则必须: 1) 选择元件性能和系统结构,不致因扰动量 d 的影响,破坏其预期关系。
 式中 y ——被控制量. x ——给定量. d ——扰动量. 为了能长时间稳定地复现 y 与 x 之间预期关系,则必须: 1) 选择元件性能和系统结构,不致因扰动量 d 的影响,破坏其预期关系。")
63
确保内部扰动量(如元件间的寄生耦合)不产
生作用(抗干扰),以及元件的磨损、腐蚀和疲 劳效应等不使系统功能过早失效(可靠性) 。 设计机电一体化系统与外部的主要联系和三 个接口尤为重要。
,以及元件的磨损、腐蚀和疲. 劳效应等不使系统功能过早失效(可靠性) 。 设计机电一体化系统与外部的主要联系和三. 个接口尤为重要。")
64
(1)系统一机械装置接口 通过该接口的机械能为 或 式中 T ——机械转矩 ω ——角速度; F ——作用力; v ——速度。
系统一机械装置接口 通过该接口的机械能为 或 式中 T ——机械转矩 ω ——角速度; F ——作用力; v ——速度。")
65
(2)系统—电网接口 该接口通过的电能 n=1,2 , 3· · · 式中 un ——工作电压 in ——工作电流
系统—电网接口 该接口通过的电能 n=1,2 , 3· · · 式中 un ——工作电压 in ——工作电流")
66
(3)系统—操作接口 实现系统控制和监测所需的信息流 式中 Mμ ——总的接口信息量。
系统—操作接口 实现系统控制和监测所需的信息流 式中 Mμ ——总的接口信息量。")
67
速度ω=f (t) 或线速度 v = f (t),从而可导出:
系统——机械装置的接口 首先要分析系统的运动过程,以及在运动过 程相反方向上作用的转矩T 和力F 的大小。 (1) 运动过程的状态变量 由电机驱动实现的运动过程,其特征量是角 速度ω=f (t) 或线速度 v = f (t),从而可导出: 角度 φ=∫ωdt 或行程 x=∫v dt,角加速度ω= dω/dt 或直线加速度 v=dv / dt。
 运动过程的状态变量. 由电机驱动实现的运动过程,其特征量是角. 速度ω=f (t) 或线速度 v = f (t),从而可导出: 角度 φ=∫ωdt 或行程 x=∫v dt,角加速度ω= dω/dt 或直线加速度 v=dv / dt。")
68
一个三维相空间内,从而可完整描述与时间有关 的运动过程。 利用转角、角速度和角加速度的极限值或直 线运动的相应极限值,可以围成传动系统实际工
综合上述各量,可把运动过程特征量表示在 一个三维相空间内,从而可完整描述与时间有关 的运动过程。 利用转角、角速度和角加速度的极限值或直 线运动的相应极限值,可以围成传动系统实际工 作的一个有限空间,在该给定的限制值内实现运 动的最佳化。 任何机械传动系统,其状态可由旋转或直线

69
运动物体的能量函数来表示。由于能量函数决定
于物体的角速度或线速度,因此速度是系统的状 态变量。一个具有n 个运动质量的传动系统,可 用n 维角速度状态向量来描述。状态向量表征 n 维状态空间内系统的运动过程。 分析系统—机械装置接口,就是定量的确定 运动过程的状态向量,同时要明确各个运动物体 的运动特征量,保持给定的函数关系和精确度,

70
以及状态变量所在状态空间的有限范围。 (2) 阻力或阻转矩,以及动态力或动态转矩 描述系统——机械装置接口的另一个目的, 在于确定与运动方向相反的阻力或阻转矩大小, 以及将产生的动态力或动态转矩。 阻转矩是加工过程本身和机械中的摩擦所引 起的,一般只能近似地确定。实际上,运动过程 是一种随机过程,其幅值特性由高斯密度分布函

71
数确定,而时间特性由自相关函数确定。此外,
工程上还采用功率密度来表征随机过程。将功率 密度积分,就可以确定与随机过程有关的总功 率,如阻转矩中损耗功率。借助与专门的测试仪 器,可把随机过程从恒定部分和周期变化部分中 分离出来,从而确定自相关函数和功率密度参 数,作为精确度地计算传动系统的基础。对快速 的位置控制传动系统,要特别注意系统的动态过

72
程,即快速响应和低速平稳性,要明确主要的扰
动量,哪些需要调节,以及允许的最大调节偏差 值。给定值(参考值)和扰动量变化时,要明确 调节时间。 在设计高质量机械传动系统时,必须使系统 具有良好的传递特性。应使线性多质量系统有足 够阻尼,其固有频率ωn 应比控制系统的穿越频 率ωd 高。若谐振点位于调节的工作范围内,则
和扰动量变化时,要明确. 调节时间。 在设计高质量机械传动系统时,必须使系统. 具有良好的传递特性。应使线性多质量系统有足. 够阻尼,其固有频率ωn 应比控制系统的穿越频. 率ωd 高。若谐振点位于调节的工作范围内,则.")
73
造成系统不允许的振荡,可通过接入滤波器来减
少振荡程度。

74
和结构形式,以满足各种机械负载和不同工作环 境的传动要求。做一般传动用的电动机功率范围 较广,从几分之一千瓦直至几千瓦,但用于一般
4.2.动力与执行元件 4.2.1电动机的选用 电动机的类型有多种,各有不同的电气特性 和结构形式,以满足各种机械负载和不同工作环 境的传动要求。做一般传动用的电动机功率范围 较广,从几分之一千瓦直至几千瓦,但用于一般 生产机械或辅助传动的装置,大多数为中小功率 的电动机。

75
其是其中的笼型电动机,因其结构简单,机械特 性好,体积小,价格低,所以应用最广泛。 笼型异步电动机的连续运行特性很好,转速
电动机的主要类型 (1)交流电动机 交流电动机是价格较便宜的一类电动机,尤 其是其中的笼型电动机,因其结构简单,机械特 性好,体积小,价格低,所以应用最广泛。 笼型异步电动机的连续运行特性很好,转速 受负载波动的影响较小,启动转矩也较大,适用 于不调速的连续运转负载。该类电动机的主要缺
交流电动机. 交流电动机是价格较便宜的一类电动机,尤. 其是其中的笼型电动机,因其结构简单,机械特. 性好,体积小,价格低,所以应用最广泛。 笼型异步电动机的连续运行特性很好,转速. 受负载波动的影响较小,启动转矩也较大,适用. 于不调速的连续运转负载。该类电动机的主要缺.")
76
点为起动电流较大,约为额定电流的5—7倍。如
果电动机的容量较大,将对电网产生瞬间的冲 击,为此,常采用各种降压启动方式,把启动电 流限制在较小的范围之内。随着它的起动转矩做 相应的较大幅度的降低,它只能用于轻载启动的 设备,如风机,水泵之类的机械设备。

77
行的大功率设备,如空气压缩机,气泵等。为解 决起动问题,一般采用在电动机的转子回路中串 接频敏电阻,以限制起动电流,并获得较大的起
绕线式交流异步电动机常用于不调速连续运 行的大功率设备,如空气压缩机,气泵等。为解 决起动问题,一般采用在电动机的转子回路中串 接频敏电阻,以限制起动电流,并获得较大的起 动转矩。绕线式异步电动机的另一类用途为起重 机械,只需利用控制电器切换转子回路外接电阻 的数值,便可获取不同的机械特性,满足有级调 速的要求,还可以做四象限运行。

78
(2)直流电动机 直流电动机的主要特点是调速性能好。在一 般应用场合,大多数采用他励式直流电动机,只 需改变电枢的电压,便可实现恒转矩调速,而且 机械特性较硬,调速范围较广。如果组成闭环调 速系统,可应用于高精度的调速装置。如果降低 直流电动机的励磁电流,电动机的转速便随之升 高,但转矩要减小,这种调速方式称为恒功率调

79
速,其特点是可实现比电动机额定转速更高范围
内的调速。串励式直流电动机的机械性很软,低 速时转矩很大,故常用于电车,牵引机械之类的 应用领域。直流电动机的主要缺点是结构复杂, 维护工作量较大。而且价格较高。

80
当电动机在恒负载运行期间,使电动机的温升达到稳定值,便作为连续负载考虑。 电动机功率的计算公式为: P = Tn/9565 (4.16)
电动机容量的计算 (1) 连续恒负载运行的电动机容量计算 当电动机在恒负载运行期间,使电动机的温升达到稳定值,便作为连续负载考虑。 电动机功率的计算公式为: P = Tn/ (4.16) 式中 P ——电动机的计算功率(KW); T ——折算到电机轴的负载转矩(N*m); n ——电动机的额定转速(r/min)。
 连续恒负载运行的电动机容量计算. 当电动机在恒负载运行期间,使电动机的温升达到稳定值,便作为连续负载考虑。 电动机功率的计算公式为: P = Tn/9565 (4.16) 式中 P ——电动机的计算功率(KW); T ——折算到电机轴的负载转矩(N*m); n ——电动机的额定转速(r/min)。")
81
较大,电动机的额定功率要计入温度修正系数, 如当使用环境为450C时,电动机的额定功率约下 降5%; 500C时将下降12.5%左右。
选用的电动机额定功率必须稍大于或等于计 算功率P 的值。 当电动机的使用环境温度与标准的400C相差 较大,电动机的额定功率要计入温度修正系数, 如当使用环境为450C时,电动机的额定功率约下 降5%; 500C时将下降12.5%左右。 如果电动机需作重载起动,尚需校验电动机 的起动转矩。

82
连续变化负载的电动机功率计算方法很多, 其中常用的为等效转矩法,其步骤如下: 1)计算并描绘折算到电动机轴的负载转矩
(2)连续周期性变化负载的电动机功率计算 连续变化负载的电动机功率计算方法很多, 其中常用的为等效转矩法,其步骤如下: 1)计算并描绘折算到电动机轴的负载转矩 图,即 T = f (t ) 2)计算变化负载的等效转矩 (4.17)
连续周期性变化负载的电动机功率计算. 连续变化负载的电动机功率计算方法很多, 其中常用的为等效转矩法,其步骤如下: 1)计算并描绘折算到电动机轴的负载转矩. 图,即 T = f (t ) 2)计算变化负载的等效转矩. (4.17)")
83
按负载Te初选电动机的型号,然后在原转矩 叠加加速阶段的动态转矩 ,即可得到更实 际的转矩图,再按上述的计算公式求得选择电动
式中 Te —— 等效负载转矩(N*m) ; T1 T2 —— 各段负载转矩(N*m) ; t1 t2 —— 各段负载的持续时间; —— 为负载变化的周期。 按负载Te初选电动机的型号,然后在原转矩 叠加加速阶段的动态转矩 ,即可得到更实 际的转矩图,再按上述的计算公式求得选择电动 机用的等效转矩Tcd。
 ; T1 T2 —— 各段负载转矩(N*m) ; t1 t2 —— 各段负载的持续时间; —— 为负载变化的周期。 按负载Te初选电动机的型号,然后在原转矩. 叠加加速阶段的动态转矩 ,即可得到更实. 际的转矩图,再按上述的计算公式求得选择电动. 机用的等效转矩Tcd。")
84
Tcd ≤ TN ,即认为所选电动机型号可用。 该方法适用于电动机的转矩与电流成正比的 使用场合,不适用在运行周期内频繁起动制动的
3)电动机转矩的校验,先由公式(4.17)计算 电动机的额定转矩。当计算得到的等效转矩 Tcd ≤ TN ,即认为所选电动机型号可用。 该方法适用于电动机的转矩与电流成正比的 使用场合,不适用在运行周期内频繁起动制动的 笼型异步电动机的运行方式。较准确的计算是采 用平均消耗法,它按电动机的温升进行校验,但 计算过程十分繁琐。
电动机转矩的校验,先由公式(4.17)计算. 电动机的额定转矩。当计算得到的等效转矩. Tcd ≤ TN ,即认为所选电动机型号可用。 该方法适用于电动机的转矩与电流成正比的. 使用场合,不适用在运行周期内频繁起动制动的. 笼型异步电动机的运行方式。较准确的计算是采. 用平均消耗法,它按电动机的温升进行校验,但. 计算过程十分繁琐。")
85
短。而停止时间却很长,所以电动机的温升达不 到稳定值,如机床的夹紧装置,控制阀门所用的 电动机。 该类工作制的电动机选择,首先要校验它的
(3)短时工作制的电动机功率计算 短时工作制的特点是电动机的运行时间较 短。而停止时间却很长,所以电动机的温升达不 到稳定值,如机床的夹紧装置,控制阀门所用的 电动机。 该类工作制的电动机选择,首先要校验它的 启动转矩是否足够,应把电动机的过载能力考虑 在内。 负载所需的启动转矩为 (4.18)
短时工作制的电动机功率计算. 短时工作制的特点是电动机的运行时间较. 短。而停止时间却很长,所以电动机的温升达不. 到稳定值,如机床的夹紧装置,控制阀门所用的. 电动机。 该类工作制的电动机选择,首先要校验它的. 启动转矩是否足够,应把电动机的过载能力考虑. 在内。 负载所需的启动转矩为. (4.18)")
86
Tm — 启动过程中的最大负载转矩( N·m ) KS —加速所需的动态转矩系数,一般取 1.15——1.25;
式中 TS — 负载所需的起动转矩 ( N·m ) Tm — 启动过程中的最大负载转矩( N·m ) KS —加速所需的动态转矩系数,一般取 1.15——1.25; KV —电压波动系数(启动时的电动机端电压 与电动机额定电压之值)。 短时工作制配用的电动机应选用短时定额 的电动机,也可选用断续定额的电动机。在
 Tm — 启动过程中的最大负载转矩( N·m ) KS —加速所需的动态转矩系数,一般取. 1.15——1.25; KV —电压波动系数(启动时的电动机端电压. 与电动机额定电压之值)。 短时工作制配用的电动机应选用短时定额. 的电动机,也可选用断续定额的电动机。在.")
87
Pm——短时工作的最大负载功率( kW )。 λ——电动机的转距过载倍数。
选择电动机时,应把它的过载能力考虑在内。 如果选用异步电动机,其额定功率应满足 以下条件 P N ≥Pm / 0.75λ (4.19) 式中 PN ——电动机的额定功率( kW )。 Pm——短时工作的最大负载功率( kW )。 λ——电动机的转距过载倍数。
 式中 PN ——电动机的额定功率( kW )。 Pm——短时工作的最大负载功率( kW )。 λ——电动机的转距过载倍数。")
88
包括电动机的起动、运行、制动、停止等几个阶 段。普通的电动机一般难以胜任如此频繁的操 作,必须选择一类专用于此项工作的电动机。
(4)断续周期工作制的电动机的功率计算 断续工作制的周期规定不超过10 min,其中 包括电动机的起动、运行、制动、停止等几个阶 段。普通的电动机一般难以胜任如此频繁的操 作,必须选择一类专用于此项工作的电动机。 断续工作制的电动机以负载持续率(FC %)来 标定它的额定功率,其值分15%、25%、40%和 60%四种。
断续周期工作制的电动机的功率计算. 断续工作制的周期规定不超过10 min,其中. 包括电动机的起动、运行、制动、停止等几个阶. 段。普通的电动机一般难以胜任如此频繁的操. 作,必须选择一类专用于此项工作的电动机。 断续工作制的电动机以负载持续率(FC %)来. 标定它的额定功率,其值分15%、25%、40%和. 60%四种。")
89
功率是不同的,FC 值越小,则额定功率越大。 该类电动机的特点是机械强度很高,起动和过载 能力很强,适应于频繁工作的运行,但它的机械
特性较软,效率稍低。 断续周期工作制的电动机功率计算,可按运 行期间的负载计算出所需的功率,其方法如同连 续工作制的电动机功率计算。

90
动机型号。如果实际FC值与电动机规定的 FC 值 相差较大,则需将实际FC值下的计算功率折算到 标准FC值下的功率,其计算公式为
(4.20)
")
91
FC — 与接近的标准值(%); P — 实际负载功率 ( kW )。 PN — 按标准值的负载修正功率( kW )。
在产品样本中按被选的标准 FC 值和 PN (修正功率)便可选取合适的电动机型号。
便可选取合适的电动机型号。")
92
中的笼型异步电动机仅为同功率直流电动机价格 的1/3左右,而且能适应较差的工作环境,维护工 作量又小,所以该类电动机得到广泛应用。交流
电动机的调速方式 交流电动机的调速 交流电动机的特点是结构简单,价格低,其 中的笼型异步电动机仅为同功率直流电动机价格 的1/3左右,而且能适应较差的工作环境,维护工 作量又小,所以该类电动机得到广泛应用。交流 电动机的调速性能不如直流电动机,直至近年 来,交流电动机的变频调速技术获得成功后,才

93
彻底改变了交流调速难的问题。交流异步电动机 的转速与电源频率。磁极对数以及转差率有关, 其表达式为:
式中 f1 ——电源频率 p ——极对数; S ——电动机的转差率。 所以,只要设法改变 f1、p、s 等参数,便 可实现调速。 (4.21)
")
94
较常用的有以下几种: (1)变极调速 利用 YD 系列笼型异步电动机的绕组接线方 式变换,便可改变该电动机的极对数,实现阶跃 式的转速调节,其调速范围限定在2~4级。 (2)电磁转差离合器调速 该调速装置由笼型异步电动机,电磁转差离 合器,测速发电机及控制装置四部分组成,其中

95
的异步电动机作为驱动装置的原动力,通过电磁
转差离合器将转矩传递至它的输出轴。调节该离 合器的励磁电流,便可改变离合器输入轴与输出 轴之间的转差,达到调速的目的。 在开环情况下,离合器输出轴的机械特性 很软,不好直接应用,所以利用测速发电机的速 度反馈信号组成简单的闭环调速系统,调速范围 可达10:1,但因低速运行时,大量的转差功率

96
消耗于离合器,以至效率很低,不宜长期运行。
(3)转子串电阻调速 在绕线式异步电动机的转子回路中串接电 阻,便可改变电动机的机械特性,并随电阻值的 增大而变软。如果负载为恒定值,则电动机的转 速将随机械特性的改变而变化。因调速运行过程 中将有电能消耗于外接的电阻器中,所以也不宜 做长期低速运行。
转子串电阻调速. 在绕线式异步电动机的转子回路中串接电. 阻,便可改变电动机的机械特性,并随电阻值的. 增大而变软。如果负载为恒定值,则电动机的转. 速将随机械特性的改变而变化。因调速运行过程. 中将有电能消耗于外接的电阻器中,所以也不宜. 做长期低速运行。")
97
路中引入一个与转子电动势的频率相同,相位相 同或相反的附加电动势,在外加电动势与转子感 应电动势的共同作用下实现电动机转速的调节。
(4)串级调速 串级调速原理是在绕线异步电动机的转子回 路中引入一个与转子电动势的频率相同,相位相 同或相反的附加电动势,在外加电动势与转子感 应电动势的共同作用下实现电动机转速的调节。 串级调速属转差功率反馈型调速系统,它能 将调速运行时的大部分转差功率回馈加以利用, 所以效率较高。晶闸管串级调速是国内目前应用
串级调速. 串级调速原理是在绕线异步电动机的转子回. 路中引入一个与转子电动势的频率相同,相位相. 同或相反的附加电动势,在外加电动势与转子感. 应电动势的共同作用下实现电动机转速的调节。 串级调速属转差功率反馈型调速系统,它能. 将调速运行时的大部分转差功率回馈加以利用, 所以效率较高。晶闸管串级调速是国内目前应用.")
98
较广泛的调速系统之一。 5)变频调速 它是近几年发展最快的交流调速方式,可对 普通的笼型异步电动机实现宽范围的无级调速, 具有机械特性硬,调速精度高,起动电流小及效 率高等特点。有关变频调速的技术指标及产品介 绍将在后面提及。 交流电动机的调速方式还可以通过改变定子

99
电压来调节电动机的转速,但机械特性变软,调
速范围较小。做闭环控制时,可改善低速运行的 特性,调速范围较宽。 综述各种交流调速,其性能比较如表4.4所 示。

100
表4.4 各种交流调速性能比较 方式 特点 变极调速 滑差调速 串电阻调速 串级调速 变频调速 控制装置 转移开关或接触器控制电路
表4.4 各种交流调速性能比较 方式 特点 变极调速 滑差调速 串电阻调速 串级调速 变频调速 控制装置 转移开关或接触器控制电路 由电子线路和晶闸管组成的闭环调速控制器 由调速电阻、接触器及主令控制器组成的控制装置 电整流、逆变、逆变变压器等环节组成的SCR串级调速系统 由微处理器、接口电路、大功率晶体管组成的PWM变频调速器 电动机类型 多速笼型异步电动机 配电磁转差离合器的笼型异步电动机 绕线式异步电动机 异步电动机、小型同步电动机 调速原理 改变定子的极对数 调节离合器的转差 调节电动机的转差率 转子回路中附加电动势来控制转差功率 改变电动机的供电频率及相应电压

101
调速范围 固定2~4级 约10:1 最多8级 大于10:1 大于50:1 调速平滑性 很差 好 差 速度稳定性 一般 低速较差 很好 起动转矩 较大 自行 可调整 稍小 起动方式 直接硬起动 电动机为硬起动 分级起动 平滑起动 平滑软起动 效率 高 较高 费用 很低 较低

102
较方便,容易组成高精度的闭环调速系统。直 流电动机的机械特性方程式为
直流电动机的调速 直流电动机的特点是调速性能好,控制也 较方便,容易组成高精度的闭环调速系统。直 流电动机的机械特性方程式为 (4.22)
")
103
Ce Cm ——分别为电动势常数、转矩常数。 从式中看出。只需改变 U、R、Φ等参数, 便可实现多种方式的速度调节。
T ——电动机转矩; Φ ——磁通; Ce Cm ——分别为电动势常数、转矩常数。 从式中看出。只需改变 U、R、Φ等参数, 便可实现多种方式的速度调节。

104
(1) 电枢串电阻调速 电枢回路串接电阻后, 电动机的机械特性的斜率随电阻的改变而改变, 在恒负载下转速发生变化。 该调速方式的优点是控制装置很简单;缺点 是转速受负载的影响较大,在空载时几乎没有调 速作用,而在重载低速运行时特性显得太软,且 功耗很大。它的应用范围一般局限于断续运行的 场合,如起重、牵引设备之类。

105
(2) 改变电枢电压调速 当电动机采用他励方式,其机械特性随电枢 电压的改变产生平移,所以它的调速范围较广。 电枢电压的调节常用晶阀管装置实现,但低速运 行时功率因数变低,而且在交流侧出现较多的谐 波成分,对电网不利。

106
路产生一系列脉宽不等的脉信号,作功率放大后 驱动大功率器件。控制调制方波的占空比,便可 改变输出平均电压。将输出电压接至直流电动机
(3)PWM 直流调速系统 其原理是将直流控制信号与三角波经调制电 路产生一系列脉宽不等的脉信号,作功率放大后 驱动大功率器件。控制调制方波的占空比,便可 改变输出平均电压。将输出电压接至直流电动机 的电枢两端,便可组成性能优良的调速系统。 该调速系统的优点是调速范围广、效率高、 响应速度快、电流脉动小及电网污染小,但系统
PWM 直流调速系统. 其原理是将直流控制信号与三角波经调制电. 路产生一系列脉宽不等的脉信号,作功率放大后. 驱动大功率器件。控制调制方波的占空比,便可. 改变输出平均电压。将输出电压接至直流电动机. 的电枢两端,便可组成性能优良的调速系统。 该调速系统的优点是调速范围广、效率高、 响应速度快、电流脉动小及电网污染小,但系统.")
107
较复杂,造价也相应提高。 (4)双闭环直流调速系统 该系统的反馈量电流和转速信号,分别送入 电流调节器和速度调节器。调节器按P -I(比例— 积分)方式实现调节。由电流调节器组成的闭环 称为电流环。由速度调节器组成的闭环称为转速 环,电流环用于控制电流,转速环用于控制转 速。双闭环调速系统的静态和动态性能均很好,

108
从积分调节器到触发装置,以及其他控制功能均 由微处理器实现。它具有调速性能高;工作可靠 和体积小等特点。数控装置设有键盘和LED显示
抗扰动能力也很强。 (5) 数字式直流调速系统 目前先进的直流调速系统均采用数字控制, 从积分调节器到触发装置,以及其他控制功能均 由微处理器实现。它具有调速性能高;工作可靠 和体积小等特点。数控装置设有键盘和LED显示 器,可方便地用键盘进行参数的设定。此外,还 具备自诊断及完善的保护功能。
 数字式直流调速系统. 目前先进的直流调速系统均采用数字控制, 从积分调节器到触发装置,以及其他控制功能均. 由微处理器实现。它具有调速性能高;工作可靠. 和体积小等特点。数控装置设有键盘和LED显示. 器,可方便地用键盘进行参数的设定。此外,还. 具备自诊断及完善的保护功能。")
109
磁通减小,电动机的转速也随之升高。它还可以 高于额定转速范围的调速,但因转速的升高,导 致电动机转矩作相应比例的下降,所以属于恒功 率调速
(6)改变励磁的恒功率调速 从直流电动机的机械特性的公式可看出,当 磁通减小,电动机的转速也随之升高。它还可以 高于额定转速范围的调速,但因转速的升高,导 致电动机转矩作相应比例的下降,所以属于恒功 率调速
改变励磁的恒功率调速. 从直流电动机的机械特性的公式可看出,当. 磁通减小,电动机的转速也随之升高。它还可以. 高于额定转速范围的调速,但因转速的升高,导. 致电动机转矩作相应比例的下降,所以属于恒功. 率调速.")
110
为相应的角位移,其角位移量与输入脉冲数成正 比,而步进电机的转速与脉冲频率成正比。每一 个脉冲所对应的步进电机转角是一个固定值,通
4.3 伺服执行元件 步进电机 概述 步进电机的功能是将输入的电脉冲信号转换 为相应的角位移,其角位移量与输入脉冲数成正 比,而步进电机的转速与脉冲频率成正比。每一 个脉冲所对应的步进电机转角是一个固定值,通 称为步距角,它与步进电机的结构有关。

111
为反应式、永磁式和混合式,其中反应式应用最 广。反应式步进电机由定子和转子组成。定子上 每一对凸极均套有控制绕组,组成一相的磁极。
步进电机有几种类型,按转矩产生的原理可 为反应式、永磁式和混合式,其中反应式应用最 广。反应式步进电机由定子和转子组成。定子上 每一对凸极均套有控制绕组,组成一相的磁极。 步进电机的定子相数一般为2~6,例如三相步进 电机的定子共有3对磁极或6个凸极。步进电机的 转子为带齿的铁心,当定子各相绕组依次通电 时,定子上各对磁极产生的磁场吸引转子一步一

112
步前进。 步进电机的步距角与控制绕组的相数及转子 上的齿数相关,其对应关系为: β =360O/m1Zr 式中: β ——步距角 m 1 ——定子绕组相数 Zr ——转子齿数 例如:三相步进电机的转子数为40,则该电机的 步距角为3°。 (4.23)
")
113
步进电机的3相绕组(A相、B相、C相)轮流供 电,其顺序为A- B- C- A步进电机的供电状态每
步进电机的工作方式 三相步进电机的工作方式有下列几种: (1)三相单三拍 步进电机的驱动电源依次对 步进电机的3相绕组(A相、B相、C相)轮流供 电,其顺序为A- B- C- A步进电机的供电状态每 作一次变化称为一拍,需要三拍完成一次循环, 所以称为三拍工作方式,其特点是每拍使电机前 进一个步进角,因为每拍仅使 1相绕组通电,
三相单三拍 步进电机的驱动电源依次对. 步进电机的3相绕组(A相、B相、C相)轮流供. 电,其顺序为A- B- C- A步进电机的供电状态每. 作一次变化称为一拍,需要三拍完成一次循环, 所以称为三拍工作方式,其特点是每拍使电机前. 进一个步进角,因为每拍仅使 1相绕组通电,")
114
所以称为单三拍工作方式,步进运行方式的变换
很方便,只需要将每拍的供电状态次序倒过来即 可。由于三相单三拍工作方式在运行中出现振 动,稳定性较差,所以一般很少采用。 (2)三相六拍 该工作方式需要六拍完成一次 循环。常见的通电顺序为: A- AB- B- BC- C- CA· · ·其特点为每隔一拍有 相邻两相同时通电,每拍的步距角为三拍工作
三相六拍 该工作方式需要六拍完成一次. 循环。常见的通电顺序为: A- AB- B- BC- C- CA· · ·其特点为每隔一拍有. 相邻两相同时通电,每拍的步距角为三拍工作.")
115
方式的一半。三相六拍工作方式的运行性能很稳
定,转矩也较大,所以常被采用。 (3)三相双三拍 它的供电顺序为: AB- BC- CA- AB · · · 其特点为每拍均有相邻 的两相同时通电,所以运行比较平稳,其步距角 与单三拍方式相同。四相或五相步进电机的作方 式与三相类似,如五相十拍的供电顺序可以为 : ABC- ABCD- BCD- BCDE · ·其原则是供电顺序
三相双三拍 它的供电顺序为: AB- BC- CA- AB · · · 其特点为每拍均有相邻. 的两相同时通电,所以运行比较平稳,其步距角. 与单三拍方式相同。四相或五相步进电机的作方. 式与三相类似,如五相十拍的供电顺序可以为 : ABC- ABCD- BCD- BCDE · ·其原则是供电顺序.")
116
(1)步进电机的角位移与输入脉冲成正比,即: θ=Nβ (4.24) 式中 : β ---步距角 N ---脉冲数
按3相4相交替进行,逐相推进。 步进电机驱动的特点 (1)步进电机的角位移与输入脉冲成正比,即: θ=Nβ (4.24) 式中 : β ---步距角 N ---脉冲数
步进电机的角位移与输入脉冲成正比,即: θ=Nβ (4.24) 式中 : β ---步距角. N ---脉冲数.")
117
(2)步进电机的转速与输入脉冲频率成正比,即:
n =β×60f/360 = βf/6 (4.25) 式中 n ---步进电机的转速 r/min; β ---步距角 (度); f ---输入脉冲频率 (Hz)。
 式中 n ---步进电机的转速 r/min; β ---步距角 (度); f ---输入脉冲频率 (Hz)。")
118
的优劣,所以一般都比较复杂,在价格上高出 普通电机许多倍。
步进电机具有自锁能力,这对于位置控制 显得很重要。 步进电机的运行速度不受电源或负载波动 的影响。 步进电机的驱动电源直接关系到运行性能 的优劣,所以一般都比较复杂,在价格上高出 普通电机许多倍。

119
使转子离开平衡位置的极限转矩称为最大静态转 矩。它反映了步进电机的负载能力和工作的快速 性。步进电机可驱动的负载矩应比最大静态转矩
步进电机的性能指标 (1)最大静态转矩Tm 当步进电机处于通电的静止状态时,由外力 使转子离开平衡位置的极限转矩称为最大静态转 矩。它反映了步进电机的负载能力和工作的快速 性。步进电机可驱动的负载矩应比最大静态转矩 小得多,一般为: TL=(0.3~0.5)Tm
最大静态转矩Tm. 当步进电机处于通电的静止状态时,由外力. 使转子离开平衡位置的极限转矩称为最大静态转. 矩。它反映了步进电机的负载能力和工作的快速. 性。步进电机可驱动的负载矩应比最大静态转矩. 小得多,一般为: TL=(0.3~0.5)Tm.")
120
步进电机起动转矩与最大静态转矩密切相关。 (3) 静态步距角误差 当步进电机为空载状态输入一个单脉冲时,
(2) 起动转矩 Ts 步进电机起动转矩与最大静态转矩密切相关。 (3) 静态步距角误差 当步进电机为空载状态输入一个单脉冲时, 实际步距角与理论步距角之差称为步距角误差。 此误差越小,则表示精度越高。按制作规定,当 电机的步距角为 1.50~7.50时,其允许的静态步距 角误差为该电机步距角的25%。
 起动转矩 Ts. 步进电机起动转矩与最大静态转矩密切相关。 (3) 静态步距角误差. 当步进电机为空载状态输入一个单脉冲时, 实际步距角与理论步距角之差称为步距角误差。 此误差越小,则表示精度越高。按制作规定,当. 电机的步距角为 1.50~7.50时,其允许的静态步距. 角误差为该电机步距角的25%。")
121
加的最高突跳脉冲频率,它是衡量步进电机性能 的一项重要指标。 起动频率比连续运行频率低得多,因为在电
(4)起动频率 起动频率是指步进电机在不失步条件下可施 加的最高突跳脉冲频率,它是衡量步进电机性能 的一项重要指标。 起动频率比连续运行频率低得多,因为在电 机起动过程中,电机产生的电磁转矩除克服负载 转矩外,还要克服转动部分的惯性转矩。厂家提 供的步进电机起动频率一般指空载时的最高值,
起动频率. 起动频率是指步进电机在不失步条件下可施. 加的最高突跳脉冲频率,它是衡量步进电机性能. 的一项重要指标。 起动频率比连续运行频率低得多,因为在电. 机起动过程中,电机产生的电磁转矩除克服负载. 转矩外,还要克服转动部分的惯性转矩。厂家提. 供的步进电机起动频率一般指空载时的最高值,")
122
当电机接上负载后,随着负载转矩和转动惯量的
增加,其实际最高起动频率将显著下降。 (5) 运行频率 步进电机在一定的负载下升频加速到不失步 的最高连续运行频率称为最高运行频率。如果负 载转矩增加,运行频率将随之下降。 限制步进运行频率的主要因素为控制绕组的 感性负载,因为输入频率升高到一定值后,绕组
 运行频率. 步进电机在一定的负载下升频加速到不失步. 的最高连续运行频率称为最高运行频率。如果负. 载转矩增加,运行频率将随之下降。 限制步进运行频率的主要因素为控制绕组的. 感性负载,因为输入频率升高到一定值后,绕组.")
123
内的电流将不能升到稳定值,步进电机产生的电
磁转矩将随之减小。由此可见,运行频率的高低 与步进驱动电源的供电方式关系密切。 步进电机驱动电源的供电方式大致分为低电 压单电源驱动、高低电压双电源驱动、高电压恒 流驱动和高电压 PWM 驱动四种类型。

124
绕组,转子材料为永久磁钢,组成一定对数的磁 极。当定子绕组按步进节拍通电时,定子绕组产
步进电机产品介绍 (1)反应式步进电机 反应式步进电机的特点为步距小。运行频率 高。具有通电自锁能力,但功耗大。 (2)永磁式步进电机 电机的定子由软磁材料制成,具有多个控制 绕组,转子材料为永久磁钢,组成一定对数的磁 极。当定子绕组按步进节拍通电时,定子绕组产
反应式步进电机. 反应式步进电机的特点为步距小。运行频率. 高。具有通电自锁能力,但功耗大。 (2)永磁式步进电机. 电机的定子由软磁材料制成,具有多个控制. 绕组,转子材料为永久磁钢,组成一定对数的磁. 极。当定子绕组按步进节拍通电时,定子绕组产.")
125
生的磁场与永久磁钢的恒定磁场相互作用,从而
产生转矩。 永磁式步进电机的特点为:功耗较小,在断 电的情况下仍有定位转矩,但步距角一般较大, 需供给正负脉冲电源,起动和运行频率也较低。 该类电机的转矩均较小,常用于自动化仪表作为 执行元件。

126
机,它充分利用了反应式和永磁式两种电机的 优点,具有转矩大,步距小。运行频率高。功 耗低及自锁功能等特点。缺点是结构较复杂, 价格也较高。
(3) 混和式步进电机 混和式步进电机也称为永磁感应式步进电 机,它充分利用了反应式和永磁式两种电机的 优点,具有转矩大,步距小。运行频率高。功 耗低及自锁功能等特点。缺点是结构较复杂, 价格也较高。
 混和式步进电机. 混和式步进电机也称为永磁感应式步进电. 机,它充分利用了反应式和永磁式两种电机的. 优点,具有转矩大,步距小。运行频率高。功. 耗低及自锁功能等特点。缺点是结构较复杂, 价格也较高。")
127
高精度步进驱动系统 日本某公司近期推出的步进驱动系统带有 微处理器,并可做步进细分的先进技术产品。其 步进驱动系统具有以下特点: (1)步进细分功能,最大可实现400细分,使低 速运行十分平稳。 (2)定位精度高,步进电机的步距角为1.80, 经400细分后,其定位分辨力可以达 。
定位精度高,步进电机的步距角为1.80, 经400细分后,其定位分辨力可以达 。")
128
(4)步进电机的驱动方式有整步、半步、微步三 种,供用户任意选择。2相驱动的最高输出频率 无细分型为7kHz,细分型可达 500kHz
(3)配用的电机为2相或5相混和式步进电机,采 用正负脉冲电源供电。3相电机的步距角为1.80, 5相电机的步距角有0.720和0.360两种。该系列步 进电机的最大静态转矩为12N ·m 。 (4)步进电机的驱动方式有整步、半步、微步三 种,供用户任意选择。2相驱动的最高输出频率 无细分型为7kHz,细分型可达 500kHz
配用的电机为2相或5相混和式步进电机,采. 用正负脉冲电源供电。3相电机的步距角为1.80, 5相电机的步距角有0.720和0.360两种。该系列步. 进电机的最大静态转矩为12N ·m 。 (4)步进电机的驱动方式有整步、半步、微步三. 种,供用户任意选择。2相驱动的最高输出频率. 无细分型为7kHz,细分型可达 500kHz.")
129
(5)步进驱动电源设有110kHz开关斩波电路,
所以功耗很低,使驱动器体积做得很小。 (6)具有 CNC 控制功能,能实现闭环定位控制,可与计算机进行串行通信。 该公司的步进驱动系统属新一代的步进控制装置,可用于高精度的数控系统,但价格贵。
具有 CNC 控制功能,能实现闭环定位控制,可与计算机进行串行通信。 该公司的步进驱动系统属新一代的步进控制装置,可用于高精度的数控系统,但价格贵。")
130
的执行元件。为满足高精度控制要求,需具备以 下的特点: 具有较大的转矩,以克服转动装置的摩擦阻 力和负载转矩。
直流伺服电机 直流伺服电机的特点 直流伺服电机常用于数控系统作为伺服机构 的执行元件。为满足高精度控制要求,需具备以 下的特点: 具有较大的转矩,以克服转动装置的摩擦阻 力和负载转矩。 调速范围要宽,至少为1000:1,要求运行速

131
(3)具有快速响应能力,适应复杂的速度变化。 (4)电机的负载特性要硬,要有较大的过载能 力,以确保运行速度不受负载冲击的影响。
度平稳。 (3)具有快速响应能力,适应复杂的速度变化。 (4)电机的负载特性要硬,要有较大的过载能 力,以确保运行速度不受负载冲击的影响。 数控系统中常用的直流伺服电机为宽调速电 机,又称大惯量电机,其特点是可直接驱动滚珠 丝杠,减小了其他机械传动带来的精度损失和误 差。
具有快速响应能力,适应复杂的速度变化。 (4)电机的负载特性要硬,要有较大的过载能. 力,以确保运行速度不受负载冲击的影响。 数控系统中常用的直流伺服电机为宽调速电. 机,又称大惯量电机,其特点是可直接驱动滚珠. 丝杠,减小了其他机械传动带来的精度损失和误. 差。")
132
采用铝镍钴或稀土类高性能磁性材料,以产生强 磁场,提高输出转矩。电机的工作原理与他励式 直流电动机相同,因常用于闭环控制,在输出轴
大惯量直流伺服电机的励磁方式为永磁式, 采用铝镍钴或稀土类高性能磁性材料,以产生强 磁场,提高输出转矩。电机的工作原理与他励式 直流电动机相同,因常用于闭环控制,在输出轴 上允许配装各类测速传感器和测速发电机。为实 现定为控制所需的锁定功能,在输出轴上可配装 电磁制动器。该制动器为盘状体,靠弹簧释放能 量实现制动。

133
速方式,其开关频率在左右,以获得大调速范围 的平稳运行特性。在伺服驱动单元中常具备闭环 速度控制、闭环位置控制、四象限运行等功能,
为电机配套的高性能伺服驱动装置均采用调 速方式,其开关频率在左右,以获得大调速范围 的平稳运行特性。在伺服驱动单元中常具备闭环 速度控制、闭环位置控制、四象限运行等功能, 而且保护功能齐全,可与计算机实现联网通讯。 直流伺服产品介绍 高性能的直流伺服电机及配套的驱动器大多 输为进口产品,下面介绍一些产品的性能规格,

134
以供参考。 (1)日本WACO公司的RS系列直流伺服电机RS 系列直流伺服电机属于小功率电机,其输出功率 范围为25~500W,额定速度为 : 2500~3000r/min 可选用各类速度传感器和制动器。 RS系列电机配用WACO公司的TSE系列速度 伺服驱动单元后,可获得1000:1的调速范围。

135
1326DS系列电机的转矩为0.35~4.63N·m,可 选配1000线编码器和24V直流制动器。 A-B公司将大转矩直流伺服电机也归入了
(2)美国A-B公司的1326DS系列直流伺服电机 1326DS系列电机的转矩为0.35~4.63N·m,可 选配1000线编码器和24V直流制动器。 A-B公司将大转矩直流伺服电机也归入了 1326DS系列,其转矩范围为3.3~37.8N·m,转速 范围为1200~3600r/min,配用1388系列伺服驱动 单元。 (3)北京机床所引进生产的直流伺服电机
美国A-B公司的1326DS系列直流伺服电机. 1326DS系列电机的转矩为0.35~4.63N·m,可. 选配1000线编码器和24V直流制动器。 A-B公司将大转矩直流伺服电机也归入了. 1326DS系列,其转矩范围为3.3~37.8N·m,转速. 范围为1200~3600r/min,配用1388系列伺服驱动. 单元。 (3)北京机床所引进生产的直流伺服电机.")
136
速、转动惯量和热时间常数等技术指标,其选 择原则如下: (1)对于连续工作的伺服系统,选用电机的额 定转矩必须大于负载转矩,但对于断续工作的
直流伺服电机的选择 伺服电机的选择主要考虑电机的转矩、转 速、转动惯量和热时间常数等技术指标,其选 择原则如下: (1)对于连续工作的伺服系统,选用电机的额 定转矩必须大于负载转矩,但对于断续工作的 伺服系统 (指10min内的负载持续率为 25%~40%),电机的额定转矩可小于负载转矩。
对于连续工作的伺服系统,选用电机的额. 定转矩必须大于负载转矩,但对于断续工作的. 伺服系统 (指10min内的负载持续率为. 25%~40%),电机的额定转矩可小于负载转矩。")
137
(3)热时间常数大的电机,可在自然冷却条件下 超载工作时间较长。 (4)如果伺服机构的运动部件折算到电机轴的转
(2)所需的电机转速由负载所需的最高速经传动 比换算后得到。 (3)热时间常数大的电机,可在自然冷却条件下 超载工作时间较长。 (4)如果伺服机构的运动部件折算到电机轴的转 动惯量小于电机转子的惯量,可获得较好的 伺服性能。
所需的电机转速由负载所需的最高速经传动. 比换算后得到。 (3)热时间常数大的电机,可在自然冷却条件下. 超载工作时间较长。 (4)如果伺服机构的运动部件折算到电机轴的转. 动惯量小于电机转子的惯量,可获得较好的. 伺服性能。")
138
类为磁式交流同步式电机,另一类为笼型异步 电机。交流伺服电机比直流伺服电机有更多的 优越性,例如它不存在电刷磨损问题,输出转
交流伺服电机 用于数控系统的交流伺服电机有两类,一 类为磁式交流同步式电机,另一类为笼型异步 电机。交流伺服电机比直流伺服电机有更多的 优越性,例如它不存在电刷磨损问题,输出转 矩较高,体积也较小,所以它是数控系统中较 理想的伺服电机,但整套伺服装置的价格要比 直流装置贵。

139
极对数的永久磁铁,在电机输出轴上装有检测电 机转速和转子位置的无刷反馈装置。 电机的三相交流电源由 PWM 变频器供给,
永磁式交流同步伺服电机 该类电机的定子装有三相绕组,转子为一定 极对数的永久磁铁,在电机输出轴上装有检测电 机转速和转子位置的无刷反馈装置。 电机的三相交流电源由 PWM 变频器供给, 在很宽的范围内实现无级变频调速。为使变频电 源与电网隔离,可采用隔离式适配变压器。 交流伺服驱动的工作原理为,将数控脉冲信

140
号通过三相正弦波发生器变换为三相正弦波电
压,再利用由晶体管组成的PWM电路,转换为三 相正弦 PWM 电压,并送至电机的定子绕组,用 以产生旋转磁场,吸引转子上的磁铁,使转子作 同步旋转。因为旋转磁场的速度与输入的脉冲信 号频率成正比,所以只需改变脉冲信号的频率便 可实现电机的调速。它还具有类似步进电机的功 能,每向该交流伺服装置发出一个脉冲信号,电

141
机便有一个相应的转角,所以它也可以用于位置
控制,而且比步进电机运行平稳性好。 永磁式同步电机伺服系统具体以下的特点: (1)电机的转速不受负载变化的影响,稳定性极 高。 (2) 调速范围极广,可达100000:1或更高。 (3)在整个调速范围内,电机的转矩和过载能力 不变。
电机的转速不受负载变化的影响,稳定性极. 高。 (2) 调速范围极广,可达100000:1或更高。 (3)在整个调速范围内,电机的转矩和过载能力. 不变。")
142
(4) 可作步进方式运行,而且步距角可自由择。
I FT5 系列为中小转矩永磁式交流伺服电机, 其转矩范围为0.15~185N•m ,转速范围为: 1200~6000r/min。 为适应不同的安装条件,电机的结构形式分 为标准型和短型。 笼型交流异步伺服电机 电机的结构和工作原理与普通的电机基本

143
相同,但在它的轴端装有编码器,还可以配选制
动器。 该类电机的速度调节由矢量控制和PWM变频 技术实现。所以具有调速范围广、转矩脉动小、 低速运行平稳和噪声低等特点。 交流伺服驱动系统具有调速范围广、响应速 度快和运行平稳等特点,调速比可达10000:1, 适宜于机床的进给驱动和其他伺服装置。

144
4.3.4电液伺服元件 电液伺服的特点 液压系统的电控阀类有开关控制阀、电液伺 服阀和电液比例阀三种。 开关控制阀仅具有开关或切换油路的功能, 最常见的是电磁换向阀。 电液伺服阀是将微弱的电信号输入转换成大 功率的液压量输出。

145
电液比例阀介于上述两种控制阀之间,它将 输入的电气信号转换成机械输出信号以对油流的 压力、流量或方向进行连续地成比例控制,它在 结构上同开关控制阀类似,在控制方式上则同电 液伺服阀相似。 电液伺服阀具有快速的响应速度和很高的控 制精度,可以用它来构成快速高精度的闭环控制 系统。电液比例阀具有结构坚固、价格低廉的特

146
点,因此用于响应速度和控制精度要求不很高的
电液开环控制,以及闭环调节系统中较为合适。 电液数字控制阀用于数字信息直接控制阀工 作,数字阀可直接与计算机接口,不需D/A转换 器,与伺服阀和比例阀比较,具有结构简单、工 艺性好、价格低、抗污染能力强、重复性好、工 作稳定可靠、功耗小等优点。在微机实时控制的 电液系统,部分取代了比例阀或伺服阀的工作。

147
电液伺服阀及分类 (1)概述 电液伺服阀是一种接受电气模拟信号后,输 出相应的调制流量和压力的液压控制阀。按输出 液压信号的不同,电液伺服阀可以分为电液流量 伺服阀和电液压力伺服阀。 电液伺服阀广泛应用于电液位置、速度、加 速度和力伺服阀系统中,及伺服振动发生器中。

148
与电液比例阀相比较,电液伺服阀具有快速 的动态响应和良好的静态特性,如分辨率高、滞 环小、线性度好等。它是一种高性能、高精度的 电液控制部件,但它较敏感,要正确使用,否则 将影响系统的工作可靠性和寿命。 电液伺服阀由力矩马达或力马达、液压控制 阀或平衡机构等三部分组成。

149
(2) 电液流量伺服阀 该类阀可按液压控制的级数来分类,亦可按 力矩马达或力马达分类,也可按前置液压控制阀 的形式或按功率级的反馈形式来分类。 (3) 电液压力伺服阀 常见压力伺服阀均为双喷嘴挡板式,是带负 载压力反馈的单级或双级伺服阀。

150
达并按规定的精度停止在预定位置。定位运动属 增量运动系统,此种系统一般要求以各种频率反 复启停一个负载。启停频率可以是固定的,也可
4.4 定位机构 4.4.1 概述 外部设备的定位运动,主要是指驱动物体到 达并按规定的精度停止在预定位置。定位运动属 增量运动系统,此种系统一般要求以各种频率反 复启停一个负载。启停频率可以是固定的,也可 以是可编程的随机启停频率。外设中磁盘存贮器 的磁头定位系统、打印机的字车系统、绘图机的

151
笔架送进系统等,都是这种形态的定位运动。4.4.1.1 定位运动机构的组成及其应用
定位运动机构一般由动力源、传动控制系统 及被定位件组成。其中传动件、控制电机、传感 器、控制电路(包括计算机)构成的机电控制系 统,易于生成较为理想的驱动输入曲线,是机电 一体化定位系统的关键。传动部件分为刚性构件 和挠性构件。刚性传动件定位时残余振动小,但
构成的机电控制系. 统,易于生成较为理想的驱动输入曲线,是机电. 一体化定位系统的关键。传动部件分为刚性构件. 和挠性构件。刚性传动件定位时残余振动小,但.")
152
会使机构变大,存在噪声、间隙、摩擦等问题。
挠性传动件定位时,由于被定位物体的质量与传 动系统的弹性构成了振动系统,因此存在着使定 位控制复杂化等问题。 被定位件可分为集中质量系和分布质量系。 严格地讲,拖板头架(印字头架、绘图笔架、磁 头臂等)并非集中质量系,但当传动件为弹性体 时,可简化成单自由度或二自由度的振动系统,
并非集中质量系,但当传动件为弹性体. 时,可简化成单自由度或二自由度的振动系统,")
153
此时可将这些被定位件看作集中质量系。 定位运动机构在外部设备中的实际应用,由 凸轮、传动带、齿轮、弹簧离合器等传动件构成 的纯机械式传动控制机构逐渐被电子装置取代, 发展为机电一体化的机电驱动控制系统。进一步 发展为直接驱动方式,即传动控制机械与电合为 一体。

154
定位运动机构的性能评价 以定位精度 为指标来评价外 部设备的定位机 构,结果如 图4.15所示。

155
若同时以定位精度 和定位时间评价定 位机构,大致有 图4.16所示结果。

156
由凸轮、连杆机构或压电元件等组成的开环定位 系统,其定位运动是预先设定的,单纯且固定, 它的定位理论比较系统、完整和成熟。闭环控制
精密定位的动力学问题 定位系统分开环控制系统和闭环控制系统。 由凸轮、连杆机构或压电元件等组成的开环定位 系统,其定位运动是预先设定的,单纯且固定, 它的定位理论比较系统、完整和成熟。闭环控制 系统是由位置传感器和执行元件构成的反馈控制 系统,其定位运动可通过指令来改变,具有柔 性,精密定位装置大多属该类,在其传动机构中

157
即使有误差,也不直接影响定位精度,但是它要
求系统内各环节的刚性要高,反馈增益要大,否 则会使定位时间变长。另外,由于摩擦和侧隙的 存在,将会影响到系统的稳定性。 当要求快速定位时,必须考虑惯性力和振动 的影响,即所谓动力学问题。特别是振动,它是 影响定位精度和定位时间的主要因素之一。定位 时间和定位误差的关系大致如图4.17所示。

158
图4.17 定位误差与定位时间的关系

159
设运动物体由粗定位运动进入精密定位控制 后的振动小于的包络线,则有下式成立: 它表示定位件从静止开始运动到 tf0 时与目 标位置的误差为C0,然后进入精密定位运动。据 上式,若不考虑tf0 ,可知定位时间与定位精度 Cf 的对数成反比。 (4.26)
")
160
所以,要实现高速高精度定位,无论是开环还是
闭环系统,都要求提高系统的固有振动频率。一 般来说,系统的刚度越高,越易于提高其定位精 度和定位速度。 闭环定位控制 (1)有振动负载的伺服电机系统 打印机的字车定位控制和磁盘机的磁头定位 控制通常多用双模态控制,即受控物从当前位置
有振动负载的伺服电机系统. 打印机的字车定位控制和磁盘机的磁头定位. 控制通常多用双模态控制,即受控物从当前位置.")
161
向目标位置高速移动的存取控制和使受控物保持
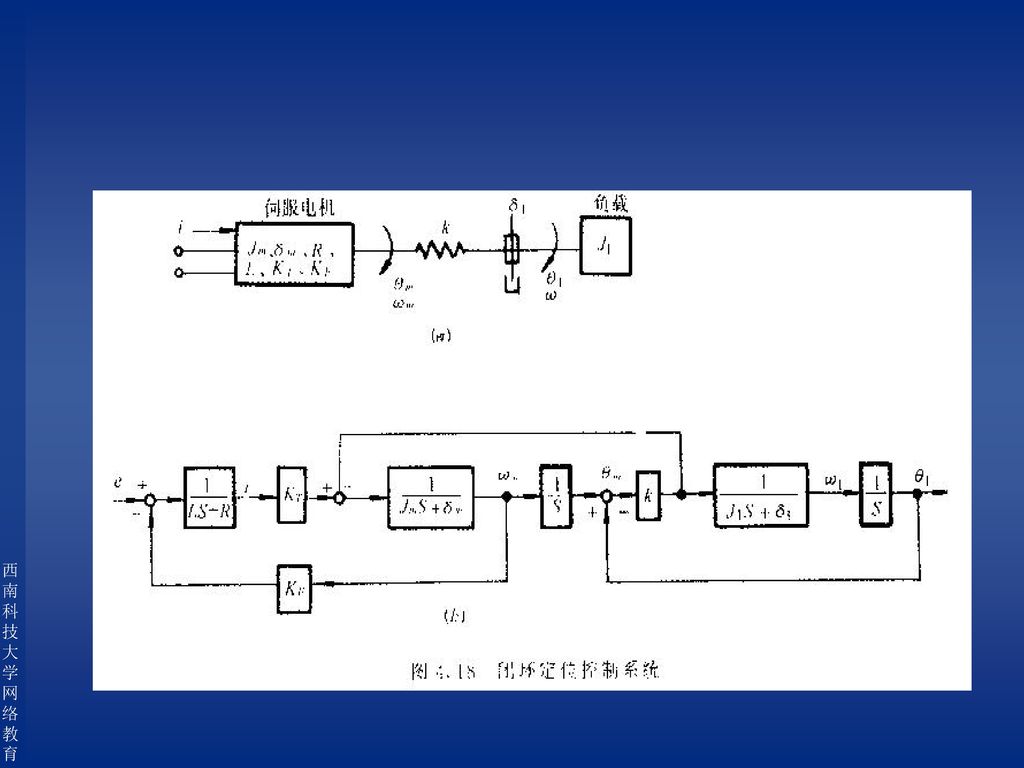
在目标位置上的位置控制。这种形态的控制,其 存取控制结束时的残余振动要通过位置控制调 定,所以要实现高速定位,重要的是确立残余振 动小的高速存取控制方法。 为实现高速定位控制,必须考虑负载系统的 振动特性。以单自由度振动系统为负载的伺服电 机驱动定位控制解析模拟及其方框如图4.18所示

164
经过实验和分析可知,定位时间t1与系统的固有
振动周期 的比值λ=t1/t0对 输入能量及控制特性起支配用。当λ接近 1 时, 可以实现高速定位。

165
4.4.2 直接传动驱动定位 定位运动机构最简单、最理想的形式是直接 驱动,即从动件不经过中间传动体,直接与驱动 源相结合。实现回转运动的直接转动驱动的实例 有串行打印机的选字定位机构。 步进电机驱动 对菊花瓣型打印机字头的选字定位机构,其 印字头是一个形似菊花的选择指印字轮,120个

166
活字字符排列在选择指外端,印字轮直接与每转
120 步的步进电机联接。步进电机按选字指令, 以 1~60 的任意步数正、反向回转选择120个字符 中的任意一个,并把所要的字符转到字锤位置, 以±0.1mm 的精度定位,同时利用附加摩擦机 构,抑制印字头的残余振动。 驱动回路采用定电流开关方式,驱动曲线为 正弦曲线,励磁方式为2相励磁,电压20~~30V,

167
用0.2A/相的小电流驱动。 为消除附加摩擦机构摩擦力引起的定位误 差,在转子接近止点时,迭加一强电流脉冲 (0.8/相,通电13.6ms),提高步进电机的转矩 常数,进行定位修正。
,提高步进电机的转矩 常数,进行定位修正。")
168
伺服电机驱动 菊花瓣型印字头改用伺服电机驱动,活字的 位置精度(±0.1mm 以下)主要由伺服系统保 证,为此多采用定位精度高的增量伺服系统,如 图4.20所示。增量伺服系统采用双模式控制方 式,它包括到达定位点前的高速移动中的速度控 制和在定位点附近的精密位置控制。图中,数字 控制部分由微处理机组成,它一直记忆着选字电

169
机当前转离基准位置的信息。当打印机得到印字
指令时,便把文字信息变换成电机的回转位置信 息,计算出电机应回转的角度和方向,把这些信 息作为指令交由伺服系统的偏差计数器记存。电 机按移动指令回转,每转过一定的角度,脉冲电 路便产生一个脉冲,偏差计数器自动减1,所以 其存贮的数据是表示电机的现在位置到目标位置 的转角。

170
图4.20 增量伺服系统框图

171
出值的平方根成比例的电压作为速度指令。电路 中的非线性 D/A变换器,通常是由不需要调整且 通用的ROM和线性D/A变换器组成。使用这样的
速度指令发生电路产生一个与偏差计数器输 出值的平方根成比例的电压作为速度指令。电路 中的非线性 D/A变换器,通常是由不需要调整且 通用的ROM和线性D/A变换器组成。使用这样的 速度指令,并且对加速时的电流进行箝位,当无 外干扰时,其效果与电流开关控制是等价的,可 实现最短时间定位。 在电机减速的同时,逐渐接近定位点,偏差

172
计数器的输出为零,它意味着已把对电机的控制
(即速度控制)转换成了位置控制。位置控制是 根据电机的回转角及其微分值的反馈量组成的比 例微分控制,通过电磁制动器实现的。 位置检测器使用输出稳定,而且分辨率和机 构构成都适用于打印机的磁编码器,其分度数为 60,输出的每一个正弦波都与一个活字对应。速 度检测器是把位置检测器输出的微分值进行合成
转换成了位置控制。位置控制是. 根据电机的回转角及其微分值的反馈量组成的比. 例微分控制,通过电磁制动器实现的。 位置检测器使用输出稳定,而且分辨率和机. 构构成都适用于打印机的磁编码器,其分度数为. 60,输出的每一个正弦波都与一个活字对应。速. 度检测器是把位置检测器输出的微分值进行合成.")
173
后,作为速度反馈用的。 直线运动直接驱动定位 通常动力源从动件之间多通过钢丝绳、传动 带、齿轮、齿条等与传动件实现直线运动。若用 直线电机直接驱动,可以排除传动零件的偏斜、 松动、非线性伸长(缩短)等,容易实现高速、 高精度。例如,直线电机驱动的打印机头架送进 机构和X—Y绘图机的笔上下驱动机构。
等,容易实现高速、 高精度。例如,直线电机驱动的打印机头架送进. 机构和X—Y绘图机的笔上下驱动机构。")
174
直线电机直接驱动 图4.21所示的打印机头架送进机构是由直线 电机直接驱动的。直线电机为可变励磁型,其可 动部分为永久磁铁,固定部分为排成两排的电枢。采用与直流伺服电机一样的控制方式。头 架上装有选字伺服电机、活字和字锤结构,由两 条导轨支承引导。为了实现打印高速化,应尽量 提高支承导轨的刚度,还应努力使推力作用点与

176
即在均匀磁场中的线圈有电流流过时,便产生与 磁场和电流都垂直的力。动圈式直接驱动机构有 广泛的用途,这里主要叙述 X—Y 绘图机在写字
可动部分重心重合。 动圈式直接驱动 动圈式驱动的原理和扬声器中的音圈一样, 即在均匀磁场中的线圈有电流流过时,便产生与 磁场和电流都垂直的力。动圈式直接驱动机构有 广泛的用途,这里主要叙述 X—Y 绘图机在写字 符或画虚线时,笔的上下动作机构所完成的直接 定位问题。

177
面时无振动、无噪声、稳定的施加一定笔压。动 圈式笔架有平线圈型、E 字铁芯型及音圈型等几 种,其中体积、效率(驱动力/体积)最好的是平
对绘图笔的要求是:上下动作迅速,到达纸 面时无振动、无噪声、稳定的施加一定笔压。动 圈式笔架有平线圈型、E 字铁芯型及音圈型等几 种,其中体积、效率(驱动力/体积)最好的是平 线圈型。 对平线圈型笔架,其优点是线圈制造简单, 容易磁化,与笔杆联接方便,可动部分重量轻, 笔间距小于15mm 。 对于动圈式笔架,可以通过控制线圈电流来
最好的是平. 线圈型。 对平线圈型笔架,其优点是线圈制造简单, 容易磁化,与笔杆联接方便,可动部分重量轻, 笔间距小于15mm 。 对于动圈式笔架,可以通过控制线圈电流来.")
178
控制力的大小和方向。所以, 对可动部分的速度控制、笔 与纸面的软接触控制,以及 写字画图时的笔压控制,都 是通过驱动电流来实现的。 笔驱动机构的模拟如 图4.23所示。

179
笔上下运动时,由滚动轴承引导,并承受弹 簧预压力。设笔驱动力,采取最短时间驱动控 制,略去摩擦阻力,其运动方程式为:

180
式中 m ---可动部分的质量 kg k ---笔支承部分的弹簧常数 (N/mm) B ---磁极的平均磁通密度 (Wb/m2) (4.28) (4.29)
 B ---磁极的平均磁通密度 (Wb/m2) (4.28) (4.29)")
181
i(t) ---驱动电流 ( A ) L ---动圈的电感 ( Mh ) R ---动圈的电阻 (Ω) E ---动圈的电动势 ( V )
x ---笔的上下位移,其最大行程为a

182
建立最短时间控制的评价函数(J ) 代入初值条件和实现软接触的边界条件,可 求得笔动作时间,进而可以建立动作时间最短且 线圈功耗最小条件下的评价函数: (4.30) (4.31)
 代入初值条件和实现软接触的边界条件,可 求得笔动作时间,进而可以建立动作时间最短且 线圈功耗最小条件下的评价函数: (4.30) (4.31)")
183
定位运动机构的刚度不是一个单纯的绝对量, 例如,利用丝杠高速驱动重物可以看作是扰性传 动系统;反之,用钢带低速驱动轻物体,可以看
同样,代入初值条件和边界条件,可求得动 作时间。 刚性传动定位机构 定位运动机构的刚度不是一个单纯的绝对量, 例如,利用丝杠高速驱动重物可以看作是扰性传 动系统;反之,用钢带低速驱动轻物体,可以看 作是刚性传动系统。

184
进电机的驱动轴上加工有螺纹槽,只要使装在小 车上的滚针和加压弹簧与丝杠上的槽相啮合就装 配好了,结构简单,在厚度小于32mm 的软盘驱
丝杠传动机构 图4.24 为用于2定位的丝杠传动机构,在步 进电机的驱动轴上加工有螺纹槽,只要使装在小 车上的滚针和加压弹簧与丝杠上的槽相啮合就装 配好了,结构简单,在厚度小于32mm 的软盘驱 动器中多采用丝杠方式,因为它与钢带传动方式 比较,容易使驱动器的体积减薄,而且成本低, 耐冲击。

185
图4.24 2定位的 丝杠传动机构

186
回转磁头小车直线前进,转角与直线距离保持线 性关系。电机转过30°,磁头前进一磁道,约 250μm 。定位就是控制电机的转角,如图4.25
图4.25(a)所示,丝杠传动时,随着电机的 回转磁头小车直线前进,转角与直线距离保持线 性关系。电机转过30°,磁头前进一磁道,约 250μm 。定位就是控制电机的转角,如图4.25 (b)所示,为使定位过程简单,丝杠螺线加工 成台阶状,每45°为一段,对应一条磁道,因而 即使电机回转误差较大,也不会偏离磁道。
所示,丝杠传动时,随着电机的. 回转磁头小车直线前进,转角与直线距离保持线. 性关系。电机转过30°,磁头前进一磁道,约. 250μm 。定位就是控制电机的转角,如图4.25. (b)所示,为使定位过程简单,丝杠螺线加工. 成台阶状,每45°为一段,对应一条磁道,因而. 即使电机回转误差较大,也不会偏离磁道。")
187
图4.25 转角与直进距离的关系 (1)电机转角定位 (2)丝杠螺线定位
电机转角定位 (2)丝杠螺线定位")
188
构。该机构主要由外螺纹丝杠和内螺纹转子组 成。内外螺纹中使用了自润滑性树脂,以提高耐 磨性。内外螺纹间预留有适当间隙,它使内外啮
图 4.26为微型磁盘驱动器中使用的定位机 构。该机构主要由外螺纹丝杠和内螺纹转子组 成。内外螺纹中使用了自润滑性树脂,以提高耐 磨性。内外螺纹间预留有适当间隙,它使内外啮 合力的力矩产生调心作用,保持丝杠轴线与内螺 纹转子轴线重合一致。利用有止转作用的球面万 向连轴器,使丝杠直线运动而不转动,同时又使 调心过程更加平滑,螺纹间的间隙及万向联轴器

190
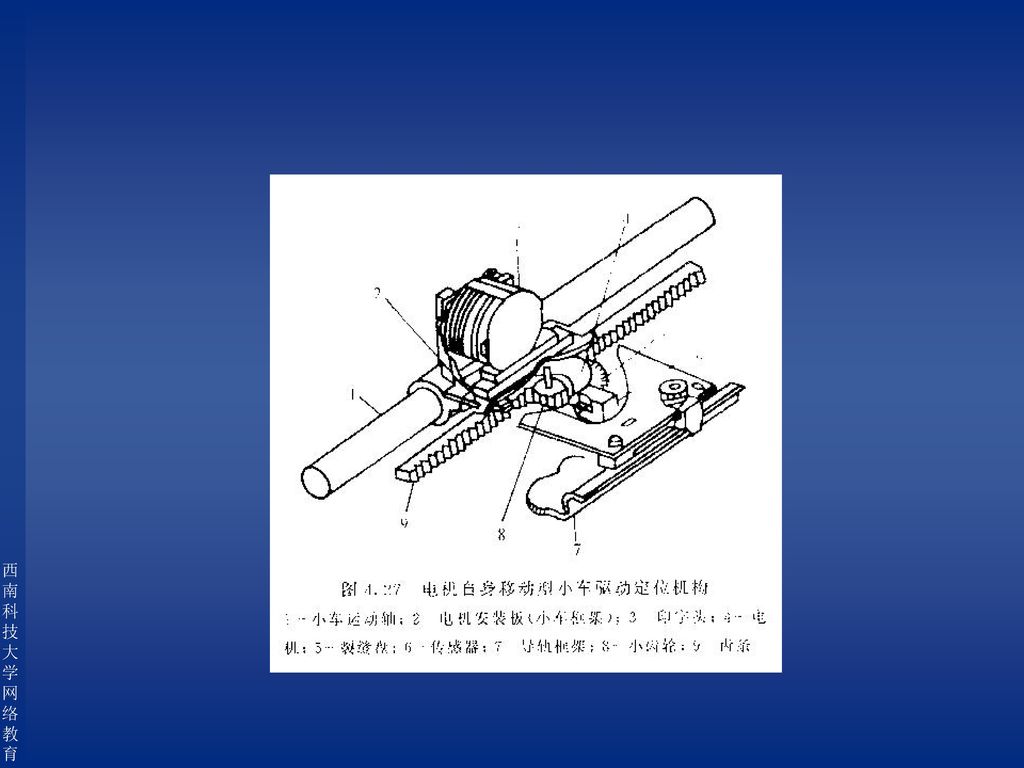
处的间隙通过螺旋弹簧消除。 丝杠传动定位机构除了应用于磁盘机构外, 在打印机的小车传动方面也有广泛应用。 齿条——齿轮机构 图 4.27 为点阵式打印机的小车定位机构, 使用的是齿轮齿条传动装置。小车内装有超薄小 型电机,电机的定子兼做小车框架,以便小型轻 量。电机是扁平的直流无刷电机,该机构与电机

192
固定的带传动、钢丝绳传动、丝杠传动等方式比
较,有声噪低、传送精度高、容易实现小型化等 优点。 端面4凸轮传动机构 图4.28(a)为1986年上市的超小型软磁盘 机中采用的磁头定位机构,机构外形尺寸约为, 重约0.28kg ,该定位机构采用端面槽形凸轮传 动,凸轮机构也是超小型的,它直接与步进电机
为1986年上市的超小型软磁盘. 机中采用的磁头定位机构,机构外形尺寸约为, 重约0.28kg ,该定位机构采用端面槽形凸轮传. 动,凸轮机构也是超小型的,它直接与步进电机.")
193
图4.28 磁头存取凸轮机构 (a) 磁头定位机构 (b)凸轮
 磁头定位机构 (b)凸轮")
194
联结。凸轮回转时,磁头滑块上固定的柱销图4.28(b)所示定位槽(旋转槽),在外径方
向做直线运动,磁头从最外圈磁道运动到最内 圈,然后再回到最外圈。软磁盘上有16道磁道, 道间距约0.53mm 。与之相对应,定位槽设计成 16级台阶状,以保证不发生位置偏离。该定位机 构的平均存取时间为80ms。

195
挠性转动定位机构 计算机外部设备除了采用凸轮、齿轮、丝杠 等钢性传动定位机构外,还大量采用钢带、钢丝 绳、齿形带等挠性传动定位机构。 钢带定位传动机构 滚筒型绘图机的驱动系统完成二个运动, 一是带动绘图纸的滚筒的回转运动(X坐标); 二是笔架的直线运动(Y坐标)。其中笔架沿Y
; 二是笔架的直线运动(Y坐标)。其中笔架沿Y.")
196
轴的直线运动多采用钢带-带轮传动机构将电机
的回转运动变换成直线运动。该机构优点是钢带 刚度高且弹簧常数固定,钢带与滑轮间没有滑移 和间隙,刚带蠕变小,所以传动的线性度好,此 外,噪声低,寿命长,结构简单,对具体机构, 在电机与笔架间为了负载的惯性平衡,常增加一 级齿轮传动,与钢带-带轮组成统一传动系统。 设受电机驱动的传送钢带的输入的位移为y,

197
笔架的位移为x,钢带的弹簧常数为k,笔架的质
量为m,不计摩擦阻力时,笔架的运动方程式为 又设钢带在传送距离 l 范围内以定加速度启 动、停止,此时笔架残余振动的最大振幅为A , 可以用下式表示 (4.32)
")
198
式中t1为输入端的加速时间,即电机的加速时
间。 将上式用电机的加速度 a 表示,则可得到 根据(4.34)可知,要使笔架在 的 加速度条件下,残余振动最大振幅在 0.05mm 以 (4.33) (4.34)
可知,要使笔架在 的. 加速度条件下,残余振动最大振幅在 0.05mm 以. (4.33) (4.34)")
199
下,要求系统的固有振动频率ω 0/2π最好在 310Hz以上。

200
表4.5 挠性传动的各种传动方式

201
表4.5为高速绘图的各种传动方式比较。可以看 出,钢丝绳和同步齿形带的蠕变均比较大,工作 不到 106 次就必须调整张力,同步齿形带的定位 误差也比较大,达0.002mm。 对于链传动方式, 要求销子与钢带孔径的间隙小于20μm,零件加 工精度要求高,工作20万次后,钢带孔有龟裂的 可能。 高摩擦力的传动方式是在带轮表面用热喷镀

202
工艺把碳化钨、烙、氧化铝等物质涂覆到带轮工
作表面,使摩擦系数高达 0.35~0.4,与平(胶) 带的摩擦系数0.25相比较,约提高了0.5倍,因而 在大驱动力或是高加速度情况下也不容易打滑。
 带的摩擦系数0.25相比较,约提高了0.5倍,因而. 在大驱动力或是高加速度情况下也不容易打滑。")
203
钢带驱动定位控制系统框图及其数学模型如 图4.29所示。 图4.29 钢带驱动控制框图及简化数学模型 (a)驱动控制框图 (b)简化数学模型
驱动控制框图 (b)简化数学模型")
204
绘图指令控制部发出脉冲化指令,该指令值所确
定的基准矩形波信号经变换成正弦波后,激励作 为位置检测器的旋转变压器。旋转变压器输出与 其位置相对应的而相位有偏移的正弦波,再利用 相位差检测电路,与先前经过相位调制的矩形波 进行比较。此时,指令值与实际位置的差值以直 流电平输出,经电机驱动电路放大后,驱动电 机。与电机相连的除位置检测器外还有速度检测

205
器,其输出经过用于保持伺服系统动作稳定的补
偿电路后,再加入到位置误差信号中,起系统的 阻尼作用,该系统的动作方程式 (4.35)
")
206
式中 J ——作用于电机的总惯量 KT ——转矩常数 KS ——电压系数 R ——电机两端的阻抗 设输入为θi ,以等加速曲线起动、停止,则由 式(4.35)表示的控制系统中,对指令θi,若要 输出θ调定时间为最小时,通常取ξ=0.6~0.7, 这时式(4.34)的A t可以近似地表示为
的A t可以近似地表示为.")
207
假如要求加速度为6g ,定位误差在0.05mm内, 则把 a =6×9800mm/S2,A1≤0.05mm代入式 (4.36),可以求得ωeo /2π>190Hz,然后把 得到的ωeo和ξ值代入式(4.35),调整各放大 器的增益,实现定位要求。 除了绘图机笔架横移采用了钢带—带轮传动 (4.36)
")
208
定位机构外,在磁盘机中磁头驱动定位机构也常
用这种形式。如IBM公司生产的8〞软磁盘机的 驱动器(43FD型)就采用了钢带和步进电机驱动 机构。环形钢带挂在两带轮之间,磁头固定在往 复运动的钢带上。与丝杠传动定位方式比较,把 寻道定位时间由原来的50ms缩短到5ms,可靠性 和噪声也得到大幅度改善。现在8〞和5.5 〞软盘 机的驱动器都仿效它,采用钢带传动定位方式。
就采用了钢带和步进电机驱动. 机构。环形钢带挂在两带轮之间,磁头固定在往. 复运动的钢带上。与丝杠传动定位方式比较,把. 寻道定位时间由原来的50ms缩短到5ms,可靠性. 和噪声也得到大幅度改善。现在8〞和5.5 〞软盘. 机的驱动器都仿效它,采用钢带传动定位方式。")
209
钢带传动另一种方式是α钢带传动(图4.30), 它更适应小型化的要求,结构紧凑。磁头移动迅 速,与高精度的步进电机相配合,使存取时间进 一步减少到 3ms,其问题是抗冲击能力差,所以 在便携式磁盘机中,又采用了丝杠传动方式。此 外,还有一种摆动式钢带传动定位机构。

210
图4.30 α钢带传动定位机构 1—导杆 2—轴承 3—小车 4—导轨 5—磁头 6—钢带 7—驱动电机

211
示,由字车、钢轮、钢丝绳、钢丝绳张紧机构、 导轨、电机等组成。 为了保证系统有较高的固有振荡频率,唯一
钢丝绳传动定位机构 打印机的字车(打印头)必须能在导轨上横 向作左右往复运动。其送进机构简图如图4.31所 示,由字车、钢轮、钢丝绳、钢丝绳张紧机构、 导轨、电机等组成。 为了保证系统有较高的固有振荡频率,唯一 的办法就是提高系统的刚度。传动系统的刚度由 单根钢丝绳的刚度、钢丝绳根数及钢丝绳的张力
必须能在导轨上横. 向作左右往复运动。其送进机构简图如图4.31所. 示,由字车、钢轮、钢丝绳、钢丝绳张紧机构、 导轨、电机等组成。 为了保证系统有较高的固有振荡频率,唯一. 的办法就是提高系统的刚度。传动系统的刚度由. 单根钢丝绳的刚度、钢丝绳根数及钢丝绳的张力.")
212
图4.31 打印机 字车送进 机构 简图

213
决定。由实验可知,钢丝绳的刚度对于张力呈线
性关系,与钢丝绳的根数成正比。 设计字车横移控制系统时,将字车的移动 量,移动方向计算出后,根据是快速移动还是间 歇移动,然后以不同的电信号作为指令输给机构 控制系统,当快速移动时,机构控制系统实施使 电机转速保持恒定速度控制;当间歇移动时,以 最短时间完成移动和定位。为此,控制系统不断

214
产生与目标距离的平方根成比例的电压,使得对
电机的速度控制在接近于停止点时,转换成位置 控制状态。并且按照电机的转角及其微分值的负 反馈构成比例微分控制电路,去控制电磁制动器 进行精密定位。 钢丝绳传动定位机构除了应用于打印机字车 送进系统外,在绘图机的笔架送进系统中也多被 采用。例如,在 X—Y 平台型绘图机中,绘图纸

215
固定在平整的绘图台上,采用钢丝绳两轴驱动,
使笔架沿 X 方向和 Y 方向移动。该方式的优点 是结构柔软,成本不太高。定位精度较高,而且 能随时观察绘图情况。缺点是加速度不能太大, 安装面积大,如前所述的滚筒绘图机的笔架横移 (Y轴 )该钢丝传动为钢丝绳传动,可以进一步 提高绘图速度。还有一种传送带型绘图机,它具 有滚筒型绘图机的紧凑和高速的特点,又克服了
该钢丝传动为钢丝绳传动,可以进一步. 提高绘图速度。还有一种传送带型绘图机,它具. 有滚筒型绘图机的紧凑和高速的特点,又克服了.")
216
平台型绘图机的缺点,在高速高精度方面更占优
势,其笔架横移也是采用钢丝绳传动定位。 钢丝绳的材料以不锈钢为主,多以 7~9 根细 丝组合成绳,外径尺寸约为0.5~3mm。例如7×7 根细丝组合成外径2mm的长的钢丝绳,其刚度约 为500N/mm。 驱动电机多使用步进电机。由于一个脉冲回 转1.8°或0.72°的步进电机的分辨率不够,所以

217
从电路着手,作4~16等分的步进细分,这种方法
叫微步驱动。当把减速机构与步进电机连接后, 笔的移动分辨率要降低,而且受电机固有响应最 大速度的限制,笔的速度不能定的太高,通常取 分辨率为0.2mm/1.8°,加速度1g,最高速度为 50m/s。 钢丝绳的弹性,以及在运动部位产生的摩擦 是引起重复误差的主要原因。其表现为加减速时

218
的过度振动。步进电机钢丝绳组成的驱动系统,
可以看作是一个自由度非线性振动系统,其数学 模型如图4.32所示,通常对于小型绘图机,系统 的固有振动频率设计在100~200Hz,加速度在 0.2~0.5g较好。当采用微步驱动时,注意不要引 起笔共振。

219
图 步进电机钢丝绳传动系统数学模型

220
为了降低成本,也可以采用转子位置控制法,即
在直流电机的后面接上一个编码器,分辨率取决 于编码器,绘图机多采用每转数百到1000个脉冲 的编码器。这时定位精度在50μm以下,加速度 在1g以上,最高速度可达50cm/s。

221
同步齿形带传动定位机构 同步齿形带是没有相位差的传动部件,以其 传动比准确、传动效率高、噪声低、能高速传动 等优点,越来越多地被采用来代替齿轮和链传 动,在外部设备中也多采用。图4.33直流伺服电 机驱动的打印机字车送进系统。该系统的特点与 上节所述钢丝绳传动字车送进系统相同。 齿形带传动系统中,一般要使用齿轮,设计

222
图4.33 同步齿形带驱动的打印机 字车送进 系统

223
时应尽量使小车部分的质量与电机一侧的等价质
量相等,所以从机构组成看,要比钢丝绳传动稍 微复杂一点。要提高带动系统的刚度,就必须强 化齿轮系统的刚度及齿形带与字车的联接部分的 刚度,对于齿形带传动,要得到相同的刚度,从 框架应提供的张力来讲,比钢丝绳方式对框架的 要求更高,对减轻重量不利,这是同步齿形带传 动的又一个缺点。

224
对于点阵式打印机的字车送进机构以及小型 绘图的笔架送进机构,其间歇运动的速度并不要 求很高,从降低成本考虑,利用步进电机和同步 齿形带组成的传动定位机构是有利的。 通常在40字/秒的低速打印时, 只要消除齿 形带的伸长和松弛就能保证满意的印字质量。对 于80字/秒的中速打印, 则需要考虑负载系统的 惯性、 刚度以及步进电机的转矩特性。设计时,

225
可以制作模型。求得最佳加速方法和速度曲线。
以便获得良好的印字质量。 由步进电机和同步齿形带组成的小型绘图机 笔横移传动定位系统,其性能指标可达重复精度 在0.2mm以下,移动速度最大为100mm/s。 此外,还有利用平带实现传动定位,定位精 度的保证主要靠控制系统,其设计重点也在控制 系统。

Similar presentations













。试求当t=0和t=2s时,荡木中点M的速度和加速度。>")

辅助动力源,短时大量供油 特点: 采用蓄能器辅助供油,可以减小泵的流量,电机的功率,降低系统的温升。>")






