第六章 汽车的平顺性 预备知识 中心思想 汽车行驶系的功能、组成、构造及工作原理。 随机振动基础知识。 首先介绍平顺性的基本概念(人体对振动的反应、评价指标),然后建立简单汽车和输入模型,最后进行振动的响应分析。 汽车理论讲义(第1版) 赵又群编著
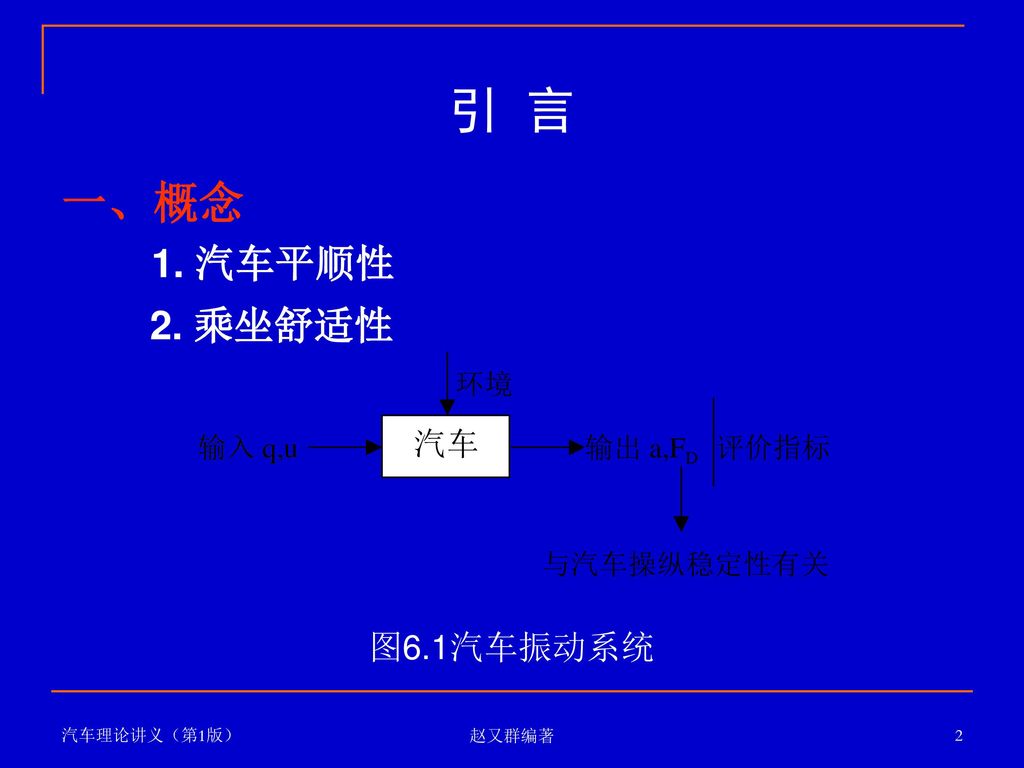
引 言 一、概念 1. 汽车平顺性 2. 乘坐舒适性 图6.1汽车振动系统 汽车理论讲义(第1版) 赵又群编著
引 言 二、本章内容 1. 人体对振动的反应和平顺性的评价。 2.振动输入-路面不平度的统计特性,道路谱。 3.汽车振动系统化,系统频响特性和参数对响应(输出)的影响。 汽车理论讲义(第1版) 赵又群编著
第一节 人体对振动的反应和平顺性评价 思考题 本节应掌握的内容 1. ISO2631-1:1997(E) 。 坐车时的感觉,如何判断汽车平顺性/舒适性? 本节应掌握的内容 1. ISO2631-1:1997(E) 。 2. 平顺性的评价方法 。 汽车理论讲义(第1版) 赵又群编著
一、人体对振动的反应 (1)人体对振动的敏感程度因人而异。 (2)70年代 ISO2631《人承受全身振动的评价指南》。 1.ISO2631-1:1997(E) (1)人体对振动的敏感程度因人而异。 (2)70年代 ISO2631《人承受全身振动的评价指南》。 (3)以短时间简谐振动实验为基础,1985年开始不断补充、修正,直到1997年 。 (4)ISO2631-1:1997(E)《人承受全身振动的评价-第一部分:一般要求》。评价长时间作用的随机振动和多点输入多轴向振动环境对人体的影响时,能与主观感觉更好地符合。 汽车理论讲义(第1版) 赵又群编著
一、人体对振动的反应 2.ISO2631-1:1997(E)简介 汽车理论讲义(第1版) 赵又群编著
一、人体对振动的反应 2.ISO2631-1:1997(E)简介 标准规定了图6-2所示的人体坐姿受振模型。在进行舒适性评价时,它除了考虑座椅支承面处输入点3个方向的线振动,还考虑该点3个方向的角振动,以及座椅靠背和脚支承面两个输入点各3个方向的线振动,共3个输入点12个轴向的振动。 汽车理论讲义(第1版) 赵又群编著
一、人体对振动的反应 2.ISO2631-1:1997(E)简介 此标准仍认为人体对不同频率振动的敏感程度不同,在图6-3上给出了各轴向0.5-80Hz的频率加权函数(渐进线),又考虑不同输入点、不同轴向的振动对人体影响的差异,还给出了各轴向振动的轴加权系数k。表6-1给出了三个输入点12个轴向,分别选用哪一个频率加权函数和相应轴加权系数k,并列出了一辆European小轿车在城市公路上行驶时,实测的各轴向加权加速度均方根值aw,然后算出总的加权加速度均方根值av。 汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
一、人体对振动的反应 由表6-1上各轴向的轴加权系数可以看出: (1) 椅面输入点xs、ys、zs三个线振动的轴加权系数k=1,是12个轴向中人体最敏感的,其余各轴向的轴加权系数均小于0.8。 (2)另外IS02631—1:1997(E)标准还规定,当评价振动对人体健康的影响时,就考虑xs、ys、zs这三个轴向,且xs、ys两个水平轴向的轴加权系数取k=1.4,比垂直轴向更敏感。 (3)标准还规定靠背水平轴向xb、yb可以由椅面xs、ys水平轴向代替,此时轴加权系数取k=1.4。 (4)因此,我国在修订的相应标准GB/T4970--1996《汽车平顺性随机输入行驶试验方法》时,评价汽车平顺性就考虑椅面xs、ys、zs这三个轴向。 汽车理论讲义(第1版) 赵又群编著
一、人体对振动的反应 2.ISO2631-1:1997(E)简介 椅面垂直轴向zs的频率加权函数最敏感频率范围标准规定为4—12.5Hz,在4-8Hz这个频率范围,人的内脏器官产生共振,而8-12.5Hz频率范围的振动对人的脊椎系统影响很大。椅面水平轴向xs、ys的频率加权函数 最敏感频率范围为0.5-2Hz,大约在3Hz以下,水平振动比垂直振动更敏感,且汽车车身部分系统在此频率范围产生共振,故应对水平振动给予充分重视。 汽车理论讲义(第1版) 赵又群编著
二、平顺性的评价方法 IS02631—1:1997(E)标准规定,当振动波形峰值系数<9(峰值系数是加权加速度时间历程aw(t)的峰值与加权加速度均方根值aw的比值)时,用基本的评价方法——加权加速度均方根值来评价振动对人体舒适和健康的影响。根据测量,各种汽车包括越野汽车,在正常行驶工况下对这一方法均适用。 汽车理论讲义(第1版) 赵又群编著
二、平顺性的评价方法 用基本的评价方法来评价时,先计算各轴向加权加速度均方根值。具体有两种计算方法 (一)基本的评价方法 用基本的评价方法来评价时,先计算各轴向加权加速度均方根值。具体有两种计算方法 1. 对记录的加速度时间历程a(t),通过相应频率加权函数w(f)的滤波网络得到加权加速度时间历程aw(t),按下式计算加权加速度均方根值 式中,T--振动的分析时间,一般取120 S。 汽车理论讲义(第1版) 赵又群编著
二、平顺性的评价方法 (一)基本的评价方法 频率加权函数w(f)(渐进线)可用右侧公式表示,式中频率f的单位为Hz 。 汽车理论讲义(第1版) 赵又群编著
二、平顺性的评价方法 2. 对记录的加速度时间历程a(t)进行频谱分析得到功率谱密度函数 ,按下式计算 (一)基本的评价方法 3.当同时考虑椅面xs、ys、zs,这三个轴向振动时,三个轴向的总加权加速度均方根值按下式计算 汽车理论讲义(第1版) 赵又群编著
二、平顺性的评价方法 (一)基本的评价方法 4.有些“人体振动测量仪”采用加权振级Law,它与加权加速度均方根值aw换算,按下式进行 式中,a0为参考加速度均方根值,a0=10-6ms-2 表6—2给出了加权振级Law和加权加速度均方根值aw与人的主观感觉之间的关系。 汽车理论讲义(第1版) 赵又群编著
二、平顺性的评价方法 汽车理论讲义(第1版) 赵又群编著
二、平顺性的评价方法 (二)辅助评价方法 当峰值系数>9时,IS02631-1:1997(E)标准规定用均4次方限值的方法来评价,它能更好地估计偶尔遇到过大的脉冲引起的高峰值系数振动对人体的影响,此时采用辅助评价方法——振动剂量值为 汽车理论讲义(第1版) 赵又群编著
第一节结束! 汽车理论讲义(第1版) 赵又群编著
第二节 路面不平度的统计特性 思考题 本节应掌握的内容 1. 功率谱密度-平均能量的谱分布。 2. 空间频率与时间频率的关系。 能量的基本公式怎样表达? 本节应掌握的内容 1. 功率谱密度-平均能量的谱分布。 2. 空间频率与时间频率的关系。 3. 路面对四轮汽车的输入谱。 汽车理论讲义(第1版) 赵又群编著
一、路面不平度的功率谱 路面相对基准平面的高度q, 沿道路走向长度I的变化q(I)。 2.功率谱密度(psd) 式中 -代表平均能量。 1.不平度函数 路面相对基准平面的高度q, 沿道路走向长度I的变化q(I)。 2.功率谱密度(psd) 式中 -代表平均能量。 -功率谱密度,平均能量的谱分布。 汽车理论讲义(第1版) 赵又群编著
一、路面不平度的功率谱 3.路面不平度系数及路面功率谱密度的拟合 式中 n——空间频率,它是波长λ的倒数,单位m表 示每米长度中包括几个波长。 n0——参考空间频率,n=0.1m-1 ——在n频率时路面谱值称为路面不平度系数 W——频率指数(双对数坐标上斜线的斜率), 它决定路面谱的频率结构,一般W=2. 汽车理论讲义(第1版) 赵又群编著
一、路面不平度的功率谱 4.根据 、 将路面划分为八个等级 汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
一、路面不平度的功率谱 5.速度功率谱、加速度功率谱 当W=2时,为白噪声。 汽车理论讲义(第1版) 赵又群编著
二、 化为 1.关系 f=un Δf=uΔn 式中 -路面谱在频带Δn内包含的“功率”。 且 则 汽车理论讲义(第1版) 赵又群编著
二、 化为 2. 3. 汽车理论讲义(第1版) 赵又群编著
第二节结束! 汽车理论讲义(第1版) 赵又群编著
第三节 汽车振动系统的简化,单质量系统的振动 思考题 1. 如此复杂的汽车怎样能够简化成比较简单的多自由度系统? 2. 振动系统分类? 本节应掌握的内容 1. 7、4、2、1个自由度简化模型。 2. 单质量系统的振动 。 汽车理论讲义(第1版) 赵又群编著
一、汽车振动系统的简化 1.7个自由度模型 悬挂质量:车身+车架+车架上的总成 m2-3自由度 (垂直、俯仰、侧倾) 减振器+悬架弹簧 见下页图 : 汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
一、汽车振动系统的简化 2.4个自由度模型 悬挂质量:车身+车架+车架上的总成 m2-2自由度 (垂直、俯仰) 减振器+悬架弹簧 汽车对称于其纵轴线,且左、右车辙的不平度函数相等:x(I)=y(I)。 悬挂质量:车身+车架+车架上的总成 m2-2自由度 (垂直、俯仰) 减振器+悬架弹簧 非悬挂质量:车轮+车轴 m1-2自由度 (垂直) 汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
一、汽车振动系统的简化 3.2个自由度模型 悬挂质量分配系数: 即m2c=0,m2f、m2r在z方向上的运动相互独立,实际上是两个双质量系统的振动。 汽车理论讲义(第1版) 赵又群编著
一、汽车振动系统的简化 4.1个自由度模型 轮胎在低频区内5Hz以下,忽略轮胎的弹性与车轮的质量。 汽车理论讲义(第1版) 赵又群编著
二、车身单质量系统的自由振动 运动微分方程: 运动微分方程的解:通解+特解(齐次解+非齐次解) 令 阻尼比 固有圆频率 则齐次方程为 令 则 令 阻尼比 固有圆频率 则齐次方程为 令 则 汽车理论讲义(第1版) 赵又群编著
二、车身单质量系统的自由振动 汽车理论讲义(第1版) 赵又群编著
三、阻尼比对衰减振动的影响 1.与有阻尼固有频率有关 当 时, 只比 下降了3%左右。工程上,视 。 成立 汽车理论讲义(第1版) 当 时, 只比 下降了3%左右。工程上,视 。 成立 汽车理论讲义(第1版) 赵又群编著
三、阻尼比对衰减振动的影响 2.决定振幅的衰减程度 汽车理论讲义(第1版) 赵又群编著
四、单质量系统的频率响应特性 1.频率响应特性概念 汽车理论讲义(第1版) 赵又群编著
四、单质量系统的频率响应特性 2.频率响应特性推导 汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
四、单质量系统的频率响应特性 3.幅频特性分析 (1)低频段〔0,0.75〕, 略大于1,不呈现明显的动态特性,阻尼比对这一段的影响不大。 (1)低频段〔0,0.75〕, 略大于1,不呈现明显的动态特性,阻尼比对这一段的影响不大。 (2)共振段〔0.75, 〕, 出现共振峰值,将输入位移放大,加大 可使共振峰明显下降。 (3)高频段〔 , 〕,在 时, =1,与阻尼比无关;在 时, ,对输入起衰减作用,阻尼比减小对减振有利。 汽车理论讲义(第1版) 赵又群编著
五、单质量系统对路面随机输入的响应 (1)平顺性分析的振动响应量 车身加速度 悬架动挠度 车轮与路面间动载荷 1.用随机振动理论分析汽车平顺性 (1)平顺性分析的振动响应量 车身加速度 悬架动挠度 车轮与路面间动载荷 (2)振动响应的功率谱与均方根值 设 的均值为零,则方差(均方值),为 式中 标准差,均值为零时就等于均方根值。 汽车理论讲义(第1版) 赵又群编著
五、单质量系统对路面随机输入的响应 可通过查表或计算机计算得到: ,界限 ,概率P 任选2个 另1个 1.用随机振动理论分析汽车平顺性 (3)概率分布与标准差的关系 ( ) 可通过查表或计算机计算得到: ,界限 ,概率P 任选2个 另1个 汽车理论讲义(第1版) 赵又群编著
五、单质量系统对路面随机输入的响应 (1) 与圆频率 成正比(共振,高频)。见下页图 (2)共振时, 高频段, 2.车身加速度功率谱 的计算分析 (1) 与圆频率 成正比(共振,高频)。见下页图 (2)共振时, 高频段, 汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
五、单质量系统对路面随机输入的响应 3.车轮与路面间相对动载荷 对 的幅频特性 4.悬架的挠度 对 的幅频特性 3.车轮与路面间相对动载荷 对 的幅频特性 与 的幅频特性的趋势完全一样。 4.悬架的挠度 对 的幅频特性 限位行程〔 〕由车身平衡位置起,悬架允许最大压缩行程。 汽车理论讲义(第1版) 赵又群编著
五、单质量系统对路面随机输入的响应 4.悬架的挠度 对 的幅频特性(见下页图) (1)低频段 , 。 (2)高频段 , 弹簧变形=路面输入。 4.悬架的挠度 对 的幅频特性(见下页图) (1)低频段 , 。 (2)高频段 , 弹簧变形=路面输入。 (3)共振段 , 。 因此,悬架系统 幅频特性: 汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
第四节 车身与车轮双质量系统的振动 一、动力学模型 汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
二、系统参数对振动的影响 ,有利于平顺性。 因此 是有限度的。 阻尼比在不同频率区内的振动的影响。 1.悬架系统固有频率 因此 是有限度的。 2.阻尼比 (见下页图) 低 + 差 大 阻尼比在不同频率区内的振动的影响。 汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著
汽车理论讲义(第1版) 赵又群编著