第5章 状态转移图及编程方法 5.1 状态转移图及状态功能 5.2 单流程状态转移图的编程 5.3 选择性分支与汇合的编程 5.2 单流程状态转移图的编程 5.3 选择性分支与汇合的编程 5.4 并行分支与汇合的编程 5.5 编程实例
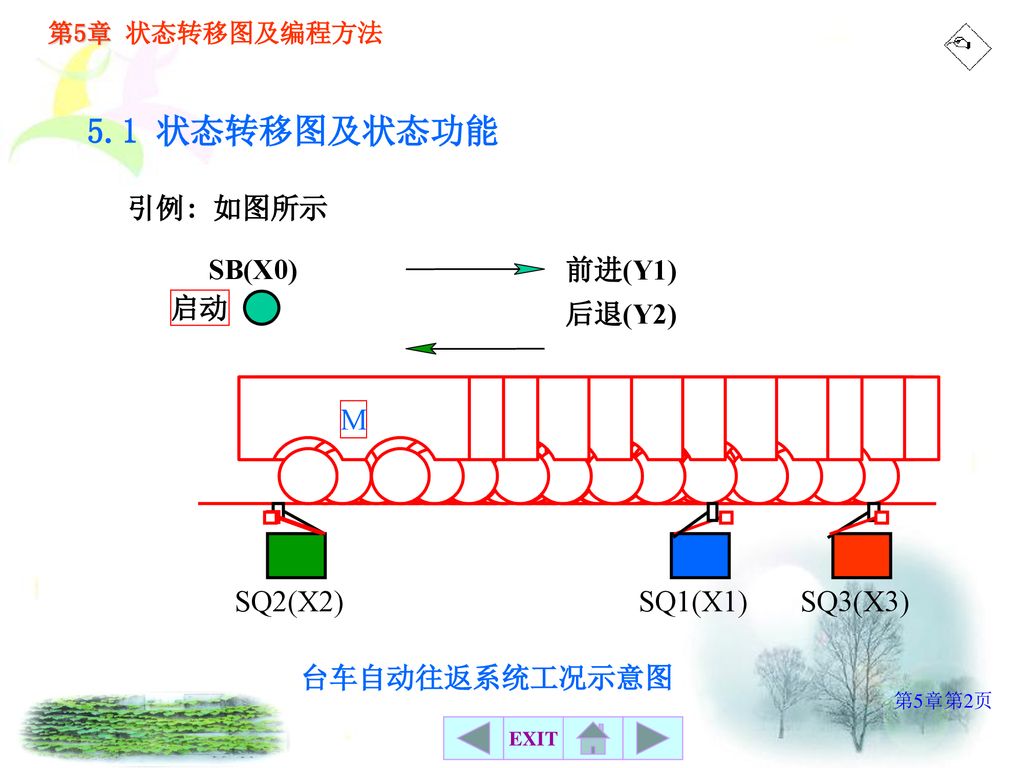
5.1 状态转移图及状态功能 M M M M M M M M M M M M M M M M M M M M M M M M M M M M 引例: 如图所示 SB(X0) 前进(Y1) 启动 后退(Y2) M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M M SQ2(X2) SQ1(X1) SQ3(X3) 台车自动往返系统工况示意图
5.1 状态转移图及状态功能 某生产过程的控制工艺要求如下: (1) 按下启动按钮SB,台车电机M正转,台车前进,碰到限位开关SQ1后,台车电机M反转,台车后退。 (2) 台车后退碰到限位开关SQ2后,台车电机M停转,台车停车,停5 s,第二次前进,碰到限位开关SQ3,再次后退。 (3) 当后退再次碰到限位开关SQ2时,台车停止(或者继续下一个循环)。
5.1 状态转移图及状态功能 为编程的需要,不妨设置输入、输出端口配置如表所示。 输入设备 端口号 输出设备 启动 SB X00 电机正转 Y01 前限位 SQ1 X01 电机反转 Y02 SQ3 X03 后限位 SQ2 X02
流程图主要由步、转移(换)、转移(换)条件、线段和动作(命令)组成。 5.1 状态转移图及状态功能 编程步骤如下: 流程图主要由步、转移(换)、转移(换)条件、线段和动作(命令)组成。 第一步:绘制流程图 流程图是描述控制系统的控制过程、功能和特性的一种图形,流程图又叫功能表图(Function Chart)。
5.1 状态转移图及状态功能 台车的每次循环工作过程分为前进、后退、延时、前进、后退五个工步。 每一步用一个矩形方框表示,方框中用文字表示该步的动作内容或用数字表示该步的的标号。 与控制过程的初始状态相对应的步称为初始步。初始步表示操作的开始。
5.1 状态转移图及状态功能 每步所驱动的负载(线圈)用线段与方框连接。方框之间用线段连接,表示工作转移的方向,习惯的方向是从上至下或从左至右,必要时也可以选用其它方向。 线段上的短线表示工作转移条件,图中状态转移条件为SB、SQ1。方框与负载连接的线段上的短线表示驱动负载的联锁条件,当联锁条件得到满足时才能驱动负载。转移条件和联锁条件可以用文字或逻辑符号标注在短线旁边。
5.1 状态转移图及状态功能 当相邻两步之间的转移条件得到满足时,转移去执行下一步动作,而上一步动作便结束,这种控制称为步进控制。 在初始状态下,按下前进启动按钮SB(X00动合触点闭合),则小车由初始状态转移到前进步,驱动对应的输出继电器Y01,当小车前进至前限位SQ1时(X01动合触点闭合),则由前进步转移到后退步。这就完成了一个步进,以下的步进读者可以自行分析。
5.1 状态转移图及状态功能 第二步:绘制状态转移图 顺序控制若采用步进指令编程,则需根据流程图画出状态转移图。状态转移图是用状态继电器(简称状态)描述的流程图。 状态元件是构成状态转移图的基本元素,是可编程序控制器的元件之一。
5.1 状态转移图及状态功能 状态可提供以下三种功能 : (1) 驱动负载。状态可以驱动M、Y、T、S等线圈。可以直接驱动和用置位SET指令驱动,也可以通过触点联锁条件来驱动。例如,当状态S20置位后,它可以直接驱动Y1。在状态S20与输出Y1之间有一个联锁条件Y2。 (2) 指定转移的目的地。状态转移的目的地由连接状态之间的线段指定,线段所指向的状态即为指定转移的目的地。例如,S20转移的目的地为S21。
流程图中的每一步,可用一个状态来表示,由此绘出图所示的台车流程图的状态转移图。如图所示,分配状态的元件如下: 初始状态 S0 前进(工序一) S20 后退(工序二) S21 延时(工序三) S22 再前进(工序四) S23 再后退(工序五) S24 注意:虽然S20与S23、S21与S24,功能相同,但它们是状态转移图中的不同工序,也就是不同状态,故编号也不同。
台车流程图的状态转移图
5.1 状态转移图及状态功能 (3) 给出转移条件。状态转移的条件用连接两状态之间的线段上的短线来表示。当转移条件得到满足时,转移的状态被置位,而转移前的状态(转移源)自动复位。例如,当X1动合触点瞬间闭合时,状态S20将转移到S21,这时S21被置位而S20自动复位。 状态的转移条件可以是单一的,也可以是多个元件的串、并联组合,如图所示。
5.1 状态转移图及状态功能
5.1 状态转移图及状态功能 在使用状态时还需要说明以下问题: (1) 状态的置位要用SET指令,这时状态才具有步进功能。 它除了提供步进触点外,还提供一般的触点。步进触点(STL触点)只有动合触点,一般触点有动合触点和动断触点。当状态被置位时,其STL触点闭合,用它去驱动负载。 (2) 用状态驱动的M、Y若要在状态转移后继续保持接通,则需用SET指令。当需要复位时,则需用RST指令。
5.2 单流程状态转移图的编程 (3) 只要在不相邻的步进段内,则可重复使用同一编号的计时器。这样,在一般的步进控制中只需使用2~3个计时器就够了,可以节省很多计时器。 (4) 状态也可以作为一般中间继电器使用,其功能与M一样,但作一般中间继电器使用时就不能再提供STL触点了。
5.2 单流程状态转移图的编程 第三步:设计步进梯形图 5.2 单流程状态转移图的编程 第三步:设计步进梯形图 每个状态提供一个STL触点,当状态置位时,其步进触点接通。用步进触点连接负载的梯形图称为步进梯形图,它可以根据状态转移图来绘制。根据图所示台车状态转移图绘制的步进梯形图。
5.2 单流程状态转移图的编程
5.2 单流程状态转移图的编程 下面对绘制步进梯形图的要点作一些说明: 5.2 单流程状态转移图的编程 下面对绘制步进梯形图的要点作一些说明: (1) 状态必须用SET指令置位才具有步进控制功能,这时状态才能提供STL触点。 (2) 状态转移图除了并联分支与联接的结构以外,STL触点基本上都是与母线连接的,通过STL触点直接驱动线圈,或通过其它触点来驱动线圈。线圈的通断由STL触点的通断来决定。 (3) 图中M8002为特殊辅助继电器的触点,它提供开机初始脉冲。 (4) 在步进程序结束时要用RET指令使后面的程序返回原母线。
5.2 单流程状态转移图的编程 第四步:编制语句表 5.2 单流程状态转移图的编程 第四步:编制语句表 由步进梯形图可用步进指令编制出语句表程序。步进指令由STL/RET指令组成。STL指令称为步进触点指令,用于步进触点的编程;RET指令称为步进返回指令,用于步进结束时返回原母线。 由步进梯形图编制语句表的要点是: (1) 对STL触点要用STL指令,而不能用LD指令。不相邻的状态转移用OUT指令,例如从S24转移到S25。 (2) 与STL触点直接连接的线圈用OUT/SET指令。对于通过触点连接的线圈,应在触点开始处使用LD/LDI指令。
5.2 单流程状态转移图的编程 (3) 步进程序结束时要写入RET指令。 LD M8002 SET S0 STL S0 LD X0 5.2 单流程状态转移图的编程 (3) 步进程序结束时要写入RET指令。 LD M8002 SET S0 STL S0 LD X0 LD X1 SET S21 STL S21 LDI Y1 OUT Y2 LD X2 SET S22 STL S22 OUT T0 SP K50
5.2 单流程状态转移图的编程 LD T0 SET S23 SET S20 STL S20 LDI Y2 OUT Y1 STL S23 5.2 单流程状态转移图的编程 LD T0 SET S23 SET S20 STL S20 LDI Y2 OUT Y1 STL S23 LD X3 SET S24 STL S24 LDI Y1 OUT Y2 LD X2 OUT S0 RET END
5.3 选择性分支与汇合的编程 1.可选择的分支与汇合 从多个流程程序中,选择执行哪一个流程称为选择性分支 下图是可选择的分支与汇合的状态转移图和梯形图。
5.3 选择性分支与汇合的编程 S21 X1 X2 X3 S24 X5 X6 X4 X7 S21 Y1 S22 Y2 X1 X2 S23 SET S22 X1 S23 X2 S26 X3 S24 S25 X5 X6 X4 Y1 Y2 Y3 Y4 Y5 X7 Y6 5.3 选择性分支与汇合的编程 S21 Y1 S22 Y2 X1 X2 S23 Y3 S24 Y4 X5 S25 Y6 X3 S26 X7 X4 X6
5.3 选择性分支与汇合的编程 选择分支和汇合的编程原则是:先集中处理分支状态,然后再集中处理汇合状态。 分支选择条件X1和X4不能同时接通。程序运行到状态器S21时,根据X1和X4的状态决定执行哪一条分支。当状态器S22或S24接通时,S21自动复位。状态器S26由S23或S25 置位,同时,前一状态器S23或S25自动复位。与图对应的语句表如下:
5.3 选择性分支与汇合的编程 SET S26 STL S21 OUT Y1 STL S24 OUT Y4 LD X1 SET S22 LD S26 SET Y6 STL S22 OUT Y2 LD X2 SET S23 LD X23 SET S3 LD X3
5.4 并行分支与汇合的编程 S21 SET S22 X1 S23 X2 S24 S25 X3 S26 X4 Y1 Y2 Y3 Y4 Y5
5.4 并行分支与汇合的编程 并行分支的编程原则是先集中进行并行分支处理,再集中进行汇合处理。 当转换条件X1接通时,由状态器S21分两路同时进入状态器S22和S24,以后系统的两个分支并行工作,图中水平双线强调的是并行工作,实际上与一般状态编程一样,先进行驱动处理,然后进行转换处理,从左到右依次进行。
5.4 并行分支与汇合的编程 STL S21 LD X3 OUT Y1 SET S25 LD X1 STL S 25 SET S22
5.5 编程实例 1 交通信号灯控制 (1)控制要求 信号灯的动作受开关总体控制,按一下启动按钮,信号灯系统开始工作,并周而复始地循环动作;按一下停止按钮,所有信号灯都熄灭。信号灯控制时序要求如表所示。
5.5 编程实例 (2)系统配置 根据信号控制要求,I/O分配及其接线如图所示 图中用一个输出点驱动两个信号灯 如果PLC输出点的输出电流不够,可以用一个输出点驱动一个信号灯 也可以在PLC输出端增设中间继电器,由中间继器再去驱动信号灯
可编程控制器 I/O接线图
(3)时序图 十字路口交通信号灯控制的时序图
5.5 编程实例 (4) 程序设计 1) 按单流程编程 如果把东西方向和南北方向信号灯的动作视为一个顺序动作过程,其中每一个时序同时有两个输出,一个输出控制东西方向的信号灯,另一个输出控制南北方向的信号灯,这样就可以按单流程进行编程,其状态转移图如图所示,对应的步进梯形图如图所示。
5.5 编程实例 按下启动按钮SB1,X0接通,S0置位,转入初始状态,由于Y0、M0条件满足,状态使S20置位,转入第一工步,同时T0开始计时,经25 s后,S21置位,S20复位,转入第二工步……当状态转移到S25时,程序又重新从第一工步开始循环。
按单流程编程的步进梯形图
5.5 编程实例 按停止按钮SB3,X2接通,M0使接通并自保,断开S0后的循环流程,当程序执行完后面的流程后停止在初始状态,即南北红灯亮,禁止通行;东西绿灯亮,允许通行。 T6、T7组成的是0.5 s的振荡电路,该电路的作用是控制绿灯闪烁,其中T1和T4是控制闪烁的时间。
5.5 编程实例 2) 按双流程编程 东西方向和南北方向信号灯的动作过程也可以看成是两个独立的顺序动作过程。其状态转移图如图所示。它具有两条状态转移支路,其结构为并联分支与汇合。按启动按钮SB1,信号系统开始运行,并反复循环。
5.5 编程实例 2 物料自动混合控制 (1) 控制要求 1) 初始状态 2 物料自动混合控制 (1) 控制要求 1) 初始状态 容器是空的,电磁阀F1、F2、F3和F4,搅拌电动机M,液面传感器L1、L2和L3,加热器H和温度传感器T均为OFF。
5.5 编程实例 2) 物料自动混合控制 物料自动混合装置如图所示。按下启动按钮,开始下列操作: (1) 电磁阀F1开启,开始注入物料A,至高度L2(此时L2、L3 为ON)时,关闭阀F1,同时开启电磁阀F2,注入物料B,当液面上升至L1时,关闭阀F2。 (2) 停止物料B注入后,启动搅拌电动机M,使A、B两种物料混合10 s。 (3) 10 s后停止搅拌,开启电磁阀F4,放出混合物料,当液面高度降至L3后,再经5 s关闭阀F4。
5.5 编程实例 3) 停止操作 按下停止按钮,在当前过程完成以后,再停止操作,回到初始状态。
5.5 编程实例 PLC I/O配置及接线
5.5 编程实例 (2)用步进指令编程 物料自动混合过程,实际上是一个按一定顺序操作的控制过程。因此,也可以用步进指令编程,其状态转移图如图所示。
3、大、小球分检控制
5.5 编程实例 其动作顺序如下: 左上为原点,机械臂下降(当磁铁压着的是大球时,限位开关SQ2断开 大球SQ2断开 →将球吸住 →上升SQ3动作 →右行到SQ5动作 小球SQ2接通→将球吸住→上升SQ3动作→右行到SQ4动作 下降SQ2动作→释放→上升SQ3动作→左移SQ1动作到原点。 左移、右移分别由Y4、Y3控制,上升、下降分别由Y2、Y0控制,将球吸住由Y1控制。
5.5 编程实例 根据工艺要求,该控制流程可根据SQ2的状态(即对应大、小球)有两个分支,此处应为分支点,且属于选择性分支。分支在机械臂下降之后根据SQ2的通断,分别将球吸住、上升、右行到SQ4或SQ5处下降,此处应为汇合点,然后再释放、上升、左移到原点。其状态转移图如图所示。
大、小球分类选择传送状态转移图
LD M8002 SET S0 STL S0 OUT Y5 LD X0 AND X1 AND X3 SET S21 STL S21 OUT T0 SP K20 LD T0 AND X2 SET S22 LD T0 ANI X2 SET S25 STL S22 SET Y1 OUT T1 K10 LD T1 SET S23 STL S23 OUT Y2 LD X3 选择性分支汇合编程方法编制的大、小球分类程序
SP K10 LD T2 SET S30 STL S30 OUT Y2 LD X3 SET S31 STL S31 LDI X1 OUT X4 LD X1 OUT S20 RET END SET S24 STL S24 LDI X4 OUT Y3 STL S25 SET Y1 OUT T1 SP K10 LD T1 SET S26 STL S26 OUT Y2 LD X3 SET S27 STL S27 LDI X5 OUT Y3 STL S24 LD X4 SET S28 STL S27 LD X5 STL S28 OUT Y0 LD X2 SET S29 STL S29 RST Y1 OUT T2 选择性分支汇合编程方法编制的大、小球分类程序
思考与练习题 1. 写出图所示梯形图对应的语句表。
思考与练习题 2. 写出图所示梯形图对应的语句表。
3. 有一小车运行过程如图所示。小车原位在后退终端,当小车压下后限位开关SQ1时,按下启动按钮SB,小车前进,当运行至料斗下方时,前限位开关SQ2动作,此时打开料斗给小车加料,延时8 s后半闭料斗,小车后退返回,SQ1动作时,打开小车底门卸料,6 s后结束,完成一次动作。如此循环下去。请用状态编程思想设计其状态转移图。
思考与练习题 4. 有一选择性分支状态转移图如图所示。请对其进行编程。 X1 S20 Y0 X2 S21 Y1 X3 S22 Y2 X4
思考与练习题 5. 有一选择性分支状态转移图如图所示。请对其进行编程。
思考与练习题 6. 有一并行分支状态转移图如图所示。请对其进行编程。 S20 Y0 S21 Y1 S22 Y2 Y3 S23 X2 S24