Download presentation
1
当系统模型不可知,难以分析,无法得到数学模型,又想知道系统运动特性的时候: 实验法
回顾: 第二章 分析法 从物理模型 数学模型(传函) 第三章 数学模型 (传函) 输出特性(响应) 当系统模型不可知,难以分析,无法得到数学模型,又想知道系统运动特性的时候: 实验法 黑匣子 输入(充分激励) 输出(测量结果) 本章 根据系统的频率特性揭示系统的动态性能 从幅频相频特性推导系统动态特性
 第三章. 数学模型 (传函) 输出特性(响应) 当系统模型不可知,难以分析,无法得到数学模型,又想知道系统运动特性的时候: 实验法. 黑匣子. 输入(充分激励) 输出(测量结果) 本章. 根据系统的频率特性揭示系统的动态性能. 从幅频相频特性推导系统动态特性.")
2
第五章 频 率 响 应 法 5.1 频率特性 5.2 典型环节的频率特性 5.3 控制系统开环频率特性曲线的绘制
第五章 频 率 响 应 法 5.1 频率特性 5.2 典型环节的频率特性 5.3 控制系统开环频率特性曲线的绘制 5.4 频域稳定性判据 5.5 稳定裕度 5.6 闭环系统的频域性能指标 5.7 频率特性的试验确定方法 小结

3
本章目标: 从频域角度,用频域的方法分析系统的各项性能 奈奎斯特曲线稳定判据 从个频域角度分析系统动态性能
1.什么是频域分析,如何进行频域分析 2.典型环节的 频率特性 绘制 幅度-相位频率图(奈奎斯特曲线图) 对数幅度频率图 对数相位频率图 3. 系统开环频率特性的绘制 4.奈奎斯特稳定判据 5.系统开环、闭环频率特性与动态特性的关系
 对数幅度频率图. 对数相位频率图. 3. 系统开环频率特性的绘制. 4.奈奎斯特稳定判据. 5.系统开环、闭环频率特性与动态特性的关系.")
4
5.1 频率特性 结论 Ar=1 =0.5 =1 =2 =2.5 =4 定义:线性系统对正弦输入信号的稳态输出与输入之比
5.1 频率特性 基本概念(物理意义) 输入一个幅值不变,频率 不断增大的正弦信号。 结论 给稳定的系统输入一个正弦,其稳态输出是与输入 Ar=1 =0.5 =1 =2 =2.5 =4 同频率的正弦,幅值随频率变,相角也随频率变。 幅频 相频
 输入一个幅值不变,频率. 不断增大的正弦信号。 结论. 给稳定的系统输入一个正弦,其稳态输出是与输入. Ar=1 =0.5. =1. =2. =2.5. =4. 同频率的正弦,幅值随频率变,相角也随频率变。 幅频. 相频.")
5
结论 基本概念(数学定义) 对于非周期输入信号,输出信号的傅里叶变换与输入信号的傅里叶变换之比
说明传递函数和频率特性可以通过变量替换相互转换 作用: 当 不可知,而 和 的变化规律可测就可以推导出 进而获得

6
频率特性的获取方法 一、实验法 实验测取频率特性的基本原理是输入正弦信号,测试输出正弦信号。只是,为保证准确性,采取了一些抗干扰、克服非线性等措施。

7
例如,对于图示的电路,当ui(t)是正弦信号时, 输出uo(t)的求取过程如下:
频率特性的获取方法 二、解析法 根据频率特性的定义,若已知系统的传递函数,输入正弦信号计算出稳态时的输出正弦信号,可求得系统的频率特性。 例如,对于图示的电路,当ui(t)是正弦信号时, 输出uo(t)的求取过程如下: 设ui(t)=U sinωt, 则其拉氏变换为
是正弦信号时, 输出uo(t)的求取过程如下: 设ui(t)=U sinωt, 则其拉氏变换为.")
8
电路的传递函数为 输出的象函数为 对上式进行拉氏反变换, 可得

9
第一项是输出的暂态分量, 第二项是输出的稳态分量。 当时间t→∞ 时, 暂态分量趋于零, 电路的稳态响应为
输入、输出的复数形式为 根据频率特性的定义,得电路的频率特性为

10
另一方面,若令电路的传递函数中的s=jω,得到

11
5.1.2 频率特性的表示方法 幅频特性 相频特性 1. 幅相频率特性(奈氏图) 实部, 虚部 2. 对数频率特性(伯德图) 幅值, 相位
画图的形式表达 频率特性的表示方法 幅频特性 相频特性 1. 幅相频率特性(奈氏图) 实部, 虚部 将直角坐标和极坐标重合,在该坐标中画 与 随 变化的规律 2. 对数频率特性(伯德图) 幅值, 相位 在对数坐标系中分别画 与 随 变化的规律 3. 对数幅相频率特性 将上述两个对数坐标系重合 (尼克尔斯图)
 实部, 虚部. 将直角坐标和极坐标重合,在该坐标中画 与 随 变化的规律. 2. 对数频率特性(伯德图) 幅值, 相位. 在对数坐标系中分别画 与 随 变化的规律. 3. 对数幅相频率特性. 将上述两个对数坐标系重合 (尼克尔斯图)")
12
1. 幅相频率特性(奈氏图) 实频特性 虚频特性 将极坐标系与直角坐标系重合,取极点为原点,横轴为极坐标 频率特性的指数形式可以用向量来表示
 实频特性 虚频特性 将极坐标系与直角坐标系重合,取极点为原点,横轴为极坐标 频率特性的指数形式可以用向量来表示")
13
1. 幅相频率特性(奈氏图) 幅相频率特性曲线,又称为Nyquist图 当输入信号的频率 变化时,向量
 幅相频率特性曲线,又称为Nyquist图 当输入信号的频率 变化时,向量")
14
图 5-3 RC电路的奈氏图

15
2. 对数频率特性(伯德图) 相频特性的纵坐标不取对数
在工程实际中, 常常将频率特性画成对数坐标图形式, 这种对数频率特性曲线又称伯德图, 由对数幅频特性和对数相频特性组成。 分别求出系统的幅频特性和相频特性,并对幅频特性纵坐标取对数: 对数幅频特性 分贝(dB) 相频特性的纵坐标不取对数 波德图bode(Gs) 以logω为横坐标,以L(ω)为纵坐标绘制对数幅频曲线; 以logω为横坐标,以 为纵坐标绘制对数相频曲线。
 相频特性的纵坐标不取对数. 波德图bode(Gs) 以logω为横坐标,以L(ω)为纵坐标绘制对数幅频曲线; 以logω为横坐标,以 为纵坐标绘制对数相频曲线。")
16
图 5-4 对数分度和线性分度

17
可以展宽频带;频率是以10倍频表示的,因此可以清楚 的表示出低频、中频和高频段的幅频和相频特性。 可以将乘法运算转化为加法运算。
使用对数坐标图的优点: 可以展宽频带;频率是以10倍频表示的,因此可以清楚 的表示出低频、中频和高频段的幅频和相频特性。 可以将乘法运算转化为加法运算。 所有的典型环节的频率特性都可以用分段直线(渐进线) 近似表示。 对实验所得的频率特性用对数坐标表示,并用分段直线 近似的方法,可以很容易的写出它的频率特性表达式。 系统由这两个环节串联组成,系统频率特性为 系统的对数频率特性为:
 近似表示。 对实验所得的频率特性用对数坐标表示,并用分段直线 近似的方法,可以很容易的写出它的频率特性表达式。 系统由这两个环节串联组成,系统频率特性为. 系统的对数频率特性为:")
18
图 5-5 RC电路的伯德图

19
5.2 典型环节的频率特性 G(jω)=K 1. 比例环节 比例环节的频率特性为 G(s)=K
显然, 它与频率无关。相应的幅频特性和相频特性为

20
对数幅频特性和相频特性为 比例环节的伯德图

21
2. 积分环节 积分环节的频率特性为 幅频特性与角频率ω成反比 , 而相频特性恒为-90° 时, 时,

22
积分环节的对数幅频特性是一条斜率为-20dB/dec的直线 它在 这一点穿过零分贝线 对数幅频特性和相频特性为
它在 这一点穿过零分贝线 对数幅频特性和相频特性为 十倍频程 decibel 在对数坐标中是一条直线 如何画图: 图 5-9 积分环节的伯德图

23
3. 微分环节 微分环节的频率特性为 其幅频特性和相频特性为 微分环节的幅频特性等于角频率ω, 而相频特性恒为90° 图 5-10 微分环节的奈氏图

24
对数幅频特性和相频特性为 图 5-11 微分环节的伯德图

25
4. 惯性环节 惯性环节的频率特性为 式(5.24)写成实部和虚部形式, 即 它的幅频特性和相频特性为
写成实部和虚部形式, 即 它的幅频特性和相频特性为")
26
所以, 惯性环节的奈氏图是圆心在(0.5, 0), 半径为0.5的半圆
则有 配方 即 所以, 惯性环节的奈氏图是圆心在(0.5, 0), 半径为0.5的半圆 为什么是半圆? 惯性环节的奈氏图
, 半径为0.5的半圆 为什么是半圆? 惯性环节的奈氏图.")
27
对数幅频特性和相频特性为 图 5-13 惯性环节的伯德图

28
对数幅频特性的渐近线画法 渐近线 Asymptote 渐近线 交叉频率Corner frequency Magnitude (dB)
高频段: , (这是一条斜线) 对数幅频特性的渐近线画法 对数频率特性: 对数幅频(近似画法): 分成高频段和低频段来讨论,用直线近似曲线 低频段: , 过零点 也是高频与低频渐进线的交叉点, 称为交叉频率或交接频率 渐近线 交叉频率Corner frequency -5 Asymptote Magnitude (dB) -10 精确曲线 Exact curve 渐近线 -15 -20 -25
 对数幅频特性的渐近线画法. 对数频率特性: 对数幅频(近似画法): 分成高频段和低频段来讨论,用直线近似曲线. 低频段: , 过零点. 也是高频与低频渐进线的交叉点, 称为交叉频率或交接频率. 渐近线. 交叉频率Corner frequency. -5. Asymptote. Magnitude (dB) -10. 精确曲线 Exact curve. 渐近线")
29
在低频段和高频段, 精确的对数幅频特性曲线与渐近线几乎重合。在ω=1/T附近, 可以选几个点, 把由式(5
在低频段和高频段, 精确的对数幅频特性曲线与渐近线几乎重合。在ω=1/T附近, 可以选几个点, 把由式(5.26)算出的精确的L(ω)值标在图上, 用曲线板光滑地连接起来, 就得精确的对数幅频特性曲线。一般情况下,常用渐近线表示系统对数幅频特性。 由图可知, 在交接频率处误差达到最大值:
算出的精确的L(ω)值标在图上, 用曲线板光滑地连接起来, 就得精确的对数幅频特性曲线。一般情况下,常用渐近线表示系统对数幅频特性。 由图可知, 在交接频率处误差达到最大值:")
30
5. 一阶微分环节 一阶微分环节的频率特性为 幅频特性和相频特性为 图 5-15 一阶微分环节的奈氏图

31
对数幅频特性和相频特性为 与惯性环节以横轴为镜像

32
6. 二阶振荡环节 二阶惯性环节的频率特性为 它的幅频特性和相频特性为 图 5-17 二阶振荡环节的奈氏图

33
对数幅频特性和相频特性为

34
高频时的对数幅频特性曲线是一条斜率为-40dB/dec的直线
低频段 : 低频时的对数幅值曲线是一条0分贝的直线 高频段 高频时的对数幅频特性曲线是一条斜率为-40dB/dec的直线 转折频率

35
误差 = 实际值 - 近似值 正误差 无误差 负误差 如何计算? 时,无谐振 时,谐振峰值出现在转折频率附近

36
对 求导,求使其等于零的频率 ,称为谐振频率,
谐振峰值

37
振荡环节L() 10 0.2 2 1 0.1 L()dB 0dB 20 40 -40 -20 100 [-40]
![振荡环节L() L()dB 0dB [-40]](http://slidesplayer.com/slide/11175697/60/images/37/%E6%8C%AF%E8%8D%A1%E7%8E%AF%E8%8A%82L%28%EF%81%B7%29+L%28%EF%81%B7%29dB+0dB+%5B-40%5D.jpg "振荡环节L() L()dB 0dB [-40]")
38
对数相频特性

39
图 5-18 二阶振荡环节的伯德图

40
7. 延迟环节 延迟环节的频率特性为 (5.33) 幅频特性和相频特性为 (5.34) 可见, 其奈氏图是一个以坐标原点为中心, 半径为1的圆。对数幅频特性和相频特性为 (5.35)
 幅频特性和相频特性为 (5.34) 可见, 其奈氏图是一个以坐标原点为中心, 半径为1的圆。对数幅频特性和相频特性为 (5.35)")
41
回顾上一节 周期信号 频率特性的定义 对数频率特性 非周期信号 伯德图 幅相频率特性 奈奎斯特曲线图

42
回顾上一节:典型环节的频率特性 G(jω)=K 1. 比例环节 G(s)=K
=K 1. 比例环节 G(s)=K")
43
系统里多一个积分环节,起始相角多一个-90°
回顾上一节:典型环节的频率特性 2. 积分环节

44
系统里多一个微分环节,起始相角多一个90° 回顾上一节:典型环节的频率特性 3. 微分环节

45
系统里多一个惯性环节, 趋于无穷时,相角位移一个-90°
回顾上一节:典型环节的频率特性 4. 惯性环节

46
系统里多一个一阶微分环节, 趋于无穷时,相角位移一个90°
回顾上一节:典型环节的频率特性 5. 一阶微分环节

47
回顾上一节:典型环节的频率特性 6. 二阶振荡环节

48
回顾上一节:典型环节的频率特性 7. 迟后环节

50
5.3 控制系统开环频率特性曲线的绘制 5.3.1 开环频率特性奈氏图的绘制
以后我们将会看到, 在绘制奈氏图时有时并不需要绘制得十分准确, 而只需要绘出奈氏图的大致形状和几个关键点的准确位置就可以了。因此, 由以上典型环节奈氏图的绘制, 大致可将奈氏图的一般作图方法归纳如下: (1) 写出A(ω)和φ(ω)的表达式; (2) 分别求出ω=0和ω=+∞时的G(jω); 确定起始点和终点
 写出A(ω)和φ(ω)的表达式; (2) 分别求出ω=0和ω=+∞时的G(jω); 确定起始点和终点.")
51
(3) 求奈氏图与实轴的交点, 交点可利用G(jω)的虚部Im[G(jω)]=0 的关系式求出, 也可利用∠G(jω) = n·180°(其中n为整数)求出;
(4) 如果有必要, 可求奈氏图与虚轴的交点, 交点可利用G(jω)的实部Re[G(jω)]=0的关系式求出, 也可利用∠G(jω) = n·90°(其中n为正整数)求出; (5) 必要时画出奈氏图中间几点,根据ω的走向; (6) 勾画出大致曲线。
![(3) 求奈氏图与实轴的交点, 交点可利用G(jω)的虚部Im[G(jω)]=0 的关系式求出, 也可利用∠G(jω) = n·180°(其中n为整数)求出; ](http://slidesplayer.com/slide/11175697/60/images/51/%283%29+%E6%B1%82%E5%A5%88%E6%B0%8F%E5%9B%BE%E4%B8%8E%E5%AE%9E%E8%BD%B4%E7%9A%84%E4%BA%A4%E7%82%B9%2C+%E4%BA%A4%E7%82%B9%E5%8F%AF%E5%88%A9%E7%94%A8G%28j%CF%89%29%E7%9A%84%E8%99%9A%E9%83%A8Im%EF%BC%BBG%28j%CF%89%29%EF%BC%BD%3D0+%E7%9A%84%E5%85%B3%E7%B3%BB%E5%BC%8F%E6%B1%82%E5%87%BA%2C+%E4%B9%9F%E5%8F%AF%E5%88%A9%E7%94%A8%E2%88%A0G%28j%CF%89%29+%3D+n%C2%B7180%C2%B0%28%E5%85%B6%E4%B8%ADn%E4%B8%BA%E6%95%B4%E6%95%B0%29%E6%B1%82%E5%87%BA%3B+%EE%80%84.jpg "(4) 如果有必要, 可求奈氏图与虚轴的交点, 交点可利用G(jω)的实部Re[G(jω)]=0的关系式求出, 也可利用∠G(jω) = n·90°(其中n为正整数)求出; (5) 必要时画出奈氏图中间几点,根据ω的走向; (6) 勾画出大致曲线。")
52
(1) 如何计算A(ω)和φ(ω)的表达式;
开环频率特性 开环传递函数 惯性环节 一阶微分 积分环节

53
结论 ω=-∞ 到 ω=0 的奈奎斯特曲线运动轨迹和 从ω=0到ω=+∞的运动轨迹关于实轴对称 (2) 分析ω=0和ω=+∞时的G(jω);
ω=-∞ 到 ω=0 的奈奎斯特曲线运动轨迹和 从ω=0到ω=+∞的运动轨迹关于实轴对称 结论 ω=0时取决于积分环节的阶数,r个积分环节, 起始角度为 ω=+∞时取决于微分环节和惯性环节的阶数, m个一阶微分说明有 个相角位移 (n-r)个惯性环节说明 个相角位移
个惯性环节说明 个相角位移.")
54
例 5-1 试绘制下列开环传递函数的奈氏图: 解 该环节开环频率特性为 ω=0, A(ω) = 10, φ(ω)=0°, 即奈氏图的起点为(10, j0); ω=+∞, A(ω) = 0, φ(ω)=-180°, 即奈氏图的终点为(0,j0)。 显然, ω从0变化到+∞, A(ω)单调递减, 而φ(ω)则从0°到-180°但不超过-180°。
单调递减, 而φ(ω)则从0°到-180°但不超过-180°。")
55
奈氏图与实轴的交点可由φ(ω)=0°得到, 即为(10, j0);
奈氏图与虚轴的交点可由φ(ω)=-90° 得到, 即 得1-0.1ω2=0, ω2=10, 则 故奈氏图与虚轴的交点为(0, -j2.87)。 其奈氏图如图5-21所示。
=-90° 得到, 即. 得1-0.1ω2=0, ω2=10, 则. 故奈氏图与虚轴的交点为(0, -j2.87)。 其奈氏图如图5-21所示。")
56
ω=0, A(ω) = 10, φ(ω)=0°, 即奈氏图的起点为(10, j0);
图 5-21 例 5-1 的奈氏图

57
用MATLAB绘制的奈氏图如图5-22所示。注意, 一般手绘的奈氏图, 其频率范围是0~+∞, 而MATLAB绘制奈氏图时, 则是从-∞~+∞。 MATLAB绘制程序如下:
nyquist([10], conv([1 1], [0.1 1])) 图 5-22MATLAB绘制例 5-1 的奈氏图
) 图 5-22MATLAB绘制例 5-1 的奈氏图.")
58
例 5-3 设系统的开环传递函数为 试绘制其奈氏图。 解 该传递函数的幅频特性和相频特性分别为 分母每增加一阶,终点相角减90度 所以有 ω=0+, A(ω)=+∞, φ(ω)=-90°-Δ为正的很小量, 故起点在第Ⅲ象限; ω=+∞, A(ω)=0, φ(ω)=-270°+Δ, 故在第Ⅱ象限趋向终点(0,j0)。
=+∞, φ(ω)=-90°-Δ为正的很小量, 故起点在第Ⅲ象限; ω=+∞, A(ω)=0, φ(ω)=-270°+Δ, 故在第Ⅱ象限趋向终点(0,j0)。")
59
因为相角从-90°变化到-270°, 所以必有与负实轴的交点。 由φ(ω)=-180°得
即 上式两边取正切 , 得2ω=1/ω, 即ω=0.707, 此时A(ω)=0.67。 因此, 奈氏图与实轴的交点为(-0.67, j0)。 系统的奈氏图如图5-24所示。
=0.67。 因此, 奈氏图与实轴的交点为(-0.67, j0)。 系统的奈氏图如图5-24所示。")
60
图 5-24 例 5-3 的奈氏图

61
例5-3 中系统型次即开环传递函数中积分环节个数ν=1, 若分别取ν=2, 3和4, 则根据积分环节的相角, 将图5-24曲线分别绕原点旋转-90°, -180°和-270°即可得相应的奈氏图, 如图5-26所示。 图 5-26 ν=1, 2, 3, 4时的奈氏图

62
例 5-4 设系统的开环传递函数为 其中K=0.1, T=1, T1=0.2, T2=0.5。试绘制系统的奈氏图。 解 该传递函数的幅频特性和相频特性分别为

63
ω=0+, A(ω)=+∞,φ(ω)=-90°+Δ, 故奈氏图起点在第Ⅳ象限;
根据系统的幅频特性和相频特性有: ω=0+, A(ω)=+∞,φ(ω)=-90°+Δ, 故奈氏图起点在第Ⅳ象限; ω=+∞, A(ω)=0, φ(ω)=-180°+Δ, 故系统奈氏图在第Ⅲ象限趋向终点(0,j0)。 因为相角范围为-90°~-180°, 所以必有与负虚轴的交点。由φ(ω)=-90° 得 -90°+arctgω-arctg0.2ω-arctg0.5ω=-90° 即 arctgω=arctg0.2ω+arctg0.5ω 上式两边取正切, 得ω2=3, 即ω=1.732, 此时A(ω)=0.0825。 所以, 奈氏图与虚轴的交点为(0, -j0.0825)。系统奈氏图如图5-27所示。
=+∞,φ(ω)=-90°+Δ, 故奈氏图起点在第Ⅳ象限; ω=+∞, A(ω)=0, φ(ω)=-180°+Δ, 故系统奈氏图在第Ⅲ象限趋向终点(0,j0)。 因为相角范围为-90°~-180°, 所以必有与负虚轴的交点。由φ(ω)=-90° 得 -90°+arctgω-arctg0.2ω-arctg0.5ω=-90° 即. arctgω=arctg0.2ω+arctg0.5ω. 上式两边取正切, 得ω2=3, 即ω=1.732, 此时A(ω)=0.0825。 所以, 奈氏图与虚轴的交点为(0, -j0.0825)。系统奈氏图如图5-27所示。")
64
图 5-27 例 5-4 的奈氏图

65
G(s)=G1(s)G2(s)…Gn(s) 5.3.2 开环频率特性伯德图的绘制 控制系统一般总是由若干环节组成的, 设其开环传递函数为
系统的开环频率特性为 或

66
则系统的开环对数频率特性为 其中, Li(ω)=20lgAi(ω), (i=1, 2, …, n)。 具体如何画开环频率特性伯德图:两种方案 方案一:分别画出各自的对数曲线,然后叠加求最终结果 方案二:利用交接频率和各个环节的特性画

67
方案一,直接叠加 例 5-5 绘制开环传递函数为 的零型系统的伯德图。 解 系统开环对数幅频特性和相频特性分别为

68
各个环节单独绘制出来然后叠加 图 5-28 例 5-5 的伯德图

69
方案二,利用交接频率画 可以将绘制对数幅频特性的步骤归纳如下: (1) 将开环频率特性分解, 写成典型环节相乘的形式; (2) 求出各典型环节的交接频率, 将其从小到大排列为ω1, ω2, ω3, … 并标注在ω轴上; (3) 绘制低频渐近线(ω1左边的部分), 这是一条斜率为 -20ν dB/dec(v为积分环节的个数)的直线, 它或它的延长线应 通过(1, 20lgK)点; (4) 随着ω的增加, 每遇到一个典型环节的交接频率, 就按上 述方法改变一次斜率;(一个惯性减20dB,一个微分加20dB,一 个二阶减40dB) (5) 必要时可利用渐近线和精确曲线的误差表, 对交接频率 附近的曲线进行修正, 以求得更精确的曲线。 对数相频特性可以由各个典型环节的相频特性相加而得, 也 可以利用相频特性函数φ(ω) 直接计算。
 绘制低频渐近线(ω1左边的部分), 这是一条斜率为. -20ν dB/dec(v为积分环节的个数)的直线, 它或它的延长线应 通过(1, 20lgK)点; (4) 随着ω的增加, 每遇到一个典型环节的交接频率, 就按上 述方法改变一次斜率;(一个惯性减20dB,一个微分加20dB,一 个二阶减40dB) (5) 必要时可利用渐近线和精确曲线的误差表, 对交接频率 附近的曲线进行修正, 以求得更精确的曲线。 对数相频特性可以由各个典型环节的相频特性相加而得, 也 可以利用相频特性函数φ(ω) 直接计算。")
70
系统开环对数幅频特性有如下特点: 低频段的斜率为-20νdB/dec, ν为开环系统中所包含的串联积分 环节的数目。 低频段(若存在小于1的交接频率时则为其延长线)在ω=1处的 对数幅值为20lgK。 在典型环节的交接频率处, 对数幅频特性渐近线的斜率要发生 变化, 变化的情况取决于典型环节的类型。如遇到G(s)= (1+Ts)±1的环节, 交接频率处斜率改变±20dB/dec; 如遇二阶振荡 环节 , 在交接频率处斜率就要改变- 40dB/dec, 等等。
= (1+Ts)±1的环节, 交接频率处斜率改变±20dB/dec; 如遇二阶振荡 环节 , 在交接频率处斜率就要改变- 40dB/dec, 等等。")
71
总结 1.确定低频段 20lgK, 纯微分(纯积分) 2.每遇一转折频率,改变一次斜率 惯性: 增加-20db/dec 振荡: 增加-40db/dec 一阶微分:增加+20db/dec 二阶微分:增加+40db/dec

72
例 5-7 已知系统的开环传递函数为 试绘制系统的伯德图。 解 将开环传递函数写成如下典型环节乘积形式: ω1=1.414, ω2=2, ω3=3 ζ= 0.354 振荡 20lgK=20lg7. 5=17.5 惯性 一阶微分

73
可见, 此系统由一个比例环节、一个积分环节、一个惯性环节、一个一阶微分环节和一个二阶振荡环节组成, 且ω1=1
可见, 此系统由一个比例环节、一个积分环节、一个惯性环节、一个一阶微分环节和一个二阶振荡环节组成, 且ω1=1.414, ω2=2, ω3=3。 20lgK=20lg7. 5=17.5。阻尼比ζ= 0.354。 在确定了各个环节的交接频率和20lgK的值以后, 可按下列步骤绘制系统的伯德图: (1) 通过点(1, 17.5)画一条斜率为-20dB/dec的直线, 它就是低频段的渐近线; (2) 在ω1=1.414处, 将渐近线的斜率从-20dB/dec改为-60 dB/dec, 这是考虑振荡环节的作用;
 通过点(1, 17.5)画一条斜率为-20dB/dec的直线, 它就是低频段的渐近线; (2) 在ω1=1.414处, 将渐近线的斜率从-20dB/dec改为-60 dB/dec, 这是考虑振荡环节的作用;")
74
(3) 由于一阶惯性环节的影响, 从ω2=2起, 渐近线斜率应减少20dB/dec, 即从原来的-60dB/dec变为-80dB/dec;
(5) 根据相频特性φ(ω), 求出若干点的相频特性曲线角度值, 如表5-6所示, 将各点光滑连接, 可以绘制系统的相频特性。 开环系统的伯德图如图5-30所示(虚线为渐近线)。 绘制程序如下: bode([10 30], conv(conv([1 0], [1 2]), [1 1 2]))
 根据相频特性φ(ω), 求出若干点的相频特性曲线角度值, 如表5-6所示, 将各点光滑连接, 可以绘制系统的相频特性。 开环系统的伯德图如图5-30所示(虚线为渐近线)。 绘制程序如下: bode([10 30], conv(conv([1 0], [1 2]), [1 1 2]))")
75
图 5-30 例 5-7 的伯德图

76
5.3.3 最小相位系统 大小与T的正负无关 大小与T的正负有关 各项时常数大小相同而符号不同的情况下,幅度特性完全相同 但各个传递函数的像移不同

77
5.3.3 最小相位系统 定义 :系统传递函数的极点和零点都位于s平面的左半部, 这种系统为最小相位系统,否则, 称为非最小相位系统。 上式中相角位移: 和 全为正,则可以对消,此时像移最小 和 有负数,必然相加结果不为最小 为什么? 零点由 决定 零、极点全在S平面左侧 极点由 决定

78
EG: 最小相系统 趋于 时的相移:90°-90°-90°-90°=-180° 趋于 时的相移:-90°-90°-90°-90°= -360°

79
5.3.3 最小相位系统 当单回路系统中只包含比例、积分、微分、惯性和振荡环节时, 系统一定是最小相位系统。如果在系统中存在迟后环节或者不稳定的环节(包括不稳定的内环回路)时, 系统就成为非最小相位系统 对于最小相位系统, 对数幅频特性与相频特性之间存在着唯一的对应关系。 根据系统的对数幅频特性, 可以唯一地确定相应的相频特性和传递函数, 反之亦然。 但是, 对于非最小相位系统, 就不存在上述的这种关系。 实用的大多数系统为最小相位系统, 为了简化工作量, 对于最小相位系统的伯德图, 可以只画幅频特性。

80
例如有一最小相位系统, 其频率特性为 另有一非最小相位系统, 其频率特性如下: (T2>T1>0) 从图5-31不难看出, 这两个系统的对数幅频特性是完全相同的, 而相频特性却根本不同。前一系统的相角φ1(ω)变化范围很小, 而后一系统的相角φ2(ω)随着角频率ω的增加却从0°变到趋于-180°。
变化范围很小, 而后一系统的相角φ2(ω)随着角频率ω的增加却从0°变到趋于-180°。")
81
图 5-31 最小相位系统和非最小相位系统的伯德图

82
例3:最小相系统Bode图如图,求传递函数
解: 低频段: 斜率 = -20db/dec 积分 W =1时, L(W) ≠0 比例 20 lgK = 40db K = 100 转折频率: db/dec 惯性 db/dec 一阶微分 db/dec 惯性 Gk(S) = (1/S)*(100)*{1/[1+(1/2)S]} *[1+(1/5)S]*{1/[1+(1/20)S]} = 800(S+5)/[S(S+2)(S+20)]
 ≠0 比例. 20 lgK = 40db. K = 100. 转折频率:2 -20db/dec 惯性 db/dec 一阶微分 db/dec 惯性. Gk(S) = (1/S)*(100)*{1/[1+(1/2)S]} *[1+(1/5)S]*{1/[1+(1/20)S]} = 800(S+5)/[S(S+2)(S+20)]")
83
5.4 频域(奈奎斯特)稳定性判据 用开环频率特性的奈奎斯特曲线判定闭环系统的稳定性 现有判断系统稳定性的方法 判断闭环传递函数的特征根
劳斯判据 为了保证系统稳定:特征方程 所有特征根在s平面的左侧 奈奎斯特稳定判据是将开环频率响应 与特征方程在s平面右半平面内的零点数和极点数联系起来的判据 用开环频率响应曲线分析系统稳定性,绕过了求解闭环极点的麻烦,工程上常用

84
5.4.1 基本原理 用开环频率特性的奈奎斯特曲线判定闭环系统的稳定性 闭环系统的稳定性,可以用系统的开环特性来判断。因 为开环模型中包含了闭环的所有元部件,包含了所有环节的 动态结构和参数。 由于闭环系统的稳定性取决于闭环特征根的性质,因此 用开环特性研究闭环的稳定性,首先应该明确开环特性与闭 环特征式的关系。

85
5.4.1 基本原理 稳定 特征方程: 所有特征根在s平面的左侧 构造辅助方程: F(s)具有以下特征 (4)F(s)的分子分母阶数相同 只要能证明F(s)的零点在s右半平面的个数为零就可以证明稳定
F(s)的分子分母阶数相同. 只要能证明F(s)的零点在s右半平面的个数为零就可以证明稳定.")
86
5.4.2映射定理 设有一复变函数为 结论 F(s)为但只连续函数 F(s)与s平面上的每一点一一对应 同理,s平面上任意一条闭合曲线,在F(s)上有一条对应的闭合曲线
为但只连续函数 F(s)与s平面上的每一点一一对应 同理,s平面上任意一条闭合曲线,在F(s)上有一条对应的闭合曲线")
87
5.4.2映射定理 结论 在s平面上有 一个闭合路径包围F(s)的一个零点, 则当围绕该路径绕顺时针转一圈,在F(s)平面上有一条对应的闭合回路绕原点顺时针一圈 在s平面上有 一个闭合路径包围F(s)的一个极点,则当围绕该路径绕顺时针转一圈,在F(s)平面上有一条对应的闭合回路绕原点逆时针一圈
的一个极点,则当围绕该路径绕顺时针转一圈,在F(s)平面上有一条对应的闭合回路绕原点逆时针一圈.")
88
5.4.2映射定理 在s平面上,如果闭合回路包围F(s)的P个极点,Z个零点,则在F(s)平面上对应有一条闭合回路绕原点逆时针旋转N圈,且 上式中,P为s平面上被顺时针包围的极点个数 N为s平面上被顺时针包围的零点个数 5.4.3 奈氏路径 为了判断闭环系统的稳定性, 需要检验F(s)是否有位于s 平面右半部的零点。为此可以选择一条包围整个s平面右半部的按顺时针方向运动的封闭曲线, 通常称为奈奎斯特回线, 简称奈氏路径
是否有位于s 平面右半部的零点。为此可以选择一条包围整个s平面右半部的按顺时针方向运动的封闭曲线, 通常称为奈奎斯特回线, 简称奈氏路径.")
89
5.4.4 奈奎斯特稳定判据 也就是说,在 平面上不会造成对(-1,j0)的顺时针围绕 是F(s)的右移1个单位,所以F(s)的原点是 平面上的的(-1,j0) 闭环控制系统稳定的充分必要条件是F(jw)在s的右半平面无零点,即s平面上的奈氏路径,不会在F(jw)平面上的原点出造成顺时针围绕 是开环传递函数的奈奎斯特曲线
在s的右半平面无零点,即s平面上的奈氏路径,不会在F(jw)平面上的原点出造成顺时针围绕. 是开环传递函数的奈奎斯特曲线.")
90
5.4.4 奈奎斯特稳定判据 系统的开环频率特性曲线 当 从 变化时,在 平面上,奈氏曲线绕(-1,j0)这个点逆时针旋转的次数为 ω 上式中,P为开环传递函数在右半平面的极点个数 闭环控制系统稳定的充分必要条件是 P=0时,开环传递函数的奈奎斯特曲线不包围(-1,j0) 时,开环传递函数有P个极点在s右半平面,则开环传递函数奈奎斯特曲线要围绕(-1,j0)逆时针转P圈 N=P, Z=0 围绕(-1,j0)的转圈只能由P造成,不能由Z造成
 时,开环传递函数有P个极点在s右半平面,则开环传递函数奈奎斯特曲线要围绕(-1,j0)逆时针转P圈. N=P, Z=0. 围绕(-1,j0)的转圈只能由P造成,不能由Z造成.")
91
例5-8 某系统开环频率特性的正频段如图中的实线所示,并已知其开环系统稳定。试判断闭环系统的稳定性。
解 系统开环稳定,所以P=0; 补画频率特性的负频段,如图中的虚线所示。 从图中看到,当w从-∞向+∞变化时,G(jw)H(jw)曲线不包围(-1,j0)点,即N = 0; 因此Z=N+P=0,闭环系统是稳定的
H(jw)曲线不包围(-1,j0)点,即N = 0; 因此Z=N+P=0,闭环系统是稳定的.")
92
例 5-9 已知开环传递函数为 试绘制(1) K=5, (2) K=10时的奈氏图, 并判断系统的稳定性。 解 (1) 当K=5时, 开环幅频特性和相频特性分别为
 K=5, (2) K=10时的奈氏图, 并判断系统的稳定性。 解 (1) 当K=5时, 开环幅频特性和相频特性分别为")
93
奈氏图如图5-37所示。 因为s平面右半部的开环极点数P=0, 且奈氏曲线不包围(-1, j0)点, 即N = 0, 则Z=P-N =0, 所以系统稳定。
点, 即N = 0, 则Z=P-N =0, 所以系统稳定。")
94
(2) 当K=10时, 奈氏图形状与(1)相同, 只是以坐标原点为中心, 向外“膨胀”而已。“膨胀”的倍数为10/5=2, 故与实轴的交点的横坐标在(-0.59×2, -0.66×2)之间, 即交点在(-1, j0)点的左侧。 因为s 平面右半部的开环极点数P=0, 且奈氏曲线顺时针包围(-1, j0)点2次, 即N=-2, 则Z=P-N=2, 所以系统不稳定, 有两个闭环极点在s 平面右半部。 用MATLAB绘制的奈氏图如图 5-38 所示, 其程序如下: nyquist([5], conv(conv([1 0.5], [1 1]), [1 2]))
, [1 2]))")
95
图 MATLAB绘制例 5-9 的奈氏图

96
5.4.3 虚轴上有开环极点时的奈氏判据 系统中有串联积分环节的时候, 即在s平面的坐标原点有开环极点。这时不能直接应用奈氏路径。 为了在这种情况下应用奈氏判据, 可以选择图5-39所示的奈氏回线, 此奈氏路径经过以坐标原点为圆心, 以无穷小量ε为半径的, 在s平面右半部的小半圆, 绕过了开环极点所在的原点。当ε→0时, 此小半圆的面积也趋近于零。因此, F(s)的位于s平面右半部的零点和极点均被此奈氏回线包围在内,而将位于坐标原点处的开环极点划到了左半部。这样处理是为了适应奈氏判据的要求, 因为应用奈氏判据时必须首先明确位于s平面右半部和左半部的开环极点的数目。
的位于s平面右半部的零点和极点均被此奈氏回线包围在内,而将位于坐标原点处的开环极点划到了左半部。这样处理是为了适应奈氏判据的要求, 因为应用奈氏判据时必须首先明确位于s平面右半部和左半部的开环极点的数目。")
97
当s沿着上述小半圆移动时, 有 当ω从0-沿小半圆变到0+时, s按逆时针方向旋转了180°, G(s)H(s)在其平面上的映射为 ν为系统中串联的积分环节数目。
H(s)在其平面上的映射为 ν为系统中串联的积分环节数目。")
98
由以上分析可见, 当s沿着小半圆从ω=0-变化到ω=0+时, θ角从-90°经0°变化到+90°, 这时在G(s)H(s)平面上的映射曲线将沿着半径为无穷大的圆弧按顺时针方向从90ν°经过 0° 转到-90ν°。
H(s)平面上的映射曲线将沿着半径为无穷大的圆弧按顺时针方向从90ν°经过 0° 转到-90ν°。")
99
例 绘制开环传递函数为 的奈氏图, 并判断系统的稳定性。 解 开环幅频特性和相频特性分别为

100
从而有ω=0+时, A(ω)=∞, φ(ω)=-90°-Δ, Δ为正的很小量, 故起点在第Ⅲ象限; ω=+∞时, A(ω) =0, φ(ω)=-270°+Δ, 故在第Ⅱ象限趋向终点(0, j0)。 因为相角范围从-90°到-270°, 所以必有与负实轴的交点。由φ(ω)=-180°得 即 上式两边取正切, 得0.5ω=1/ω, 即ω=1.414, 此时A(ω)=1.67。 因此奈氏图与实轴的交点为(-1.67, j0)。系统开环传递函数有一极点在s平面的原点处, 因此奈氏回线中半径为无穷小量ε的半圆弧对应的映射曲线是一个半径为无穷大的圆弧:
=1.67。 因此奈氏图与实轴的交点为(-1.67, j0)。系统开环传递函数有一极点在s平面的原点处, 因此奈氏回线中半径为无穷小量ε的半圆弧对应的映射曲线是一个半径为无穷大的圆弧:")
101
nyquist([10], conv(conv([1 0], [1 1]), [1 2]))
ω: 0-→0+; θ: -90°→ 0°→ +90°; φ(ω): +90°→ 0°→ -90° 奈氏图如图5-40所示。 因为s 平面右半部的开环极点数P=0, 且奈氏曲线顺时针包围(-1, j0)点2次, 即N=-2, 则Z=P-N=2, 所以系统不稳定, 有两个闭环极点在s 平面右半部。用MATLAB绘制(-1, j0)点附近的奈氏图如图5-41所示, 其程序如下: nyquist([10], conv(conv([1 0], [1 1]), [1 2]))
![ nyquist([10], conv(conv([1 0], [1 1]), [1 2]))](http://slidesplayer.com/slide/11175697/60/images/101/%EE%80%84+nyquist%28%EF%BC%BB10%EF%BC%BD%2C+conv%28conv%28%EF%BC%BB1+0%EF%BC%BD%2C+%EF%BC%BB1+1%EF%BC%BD%29%2C+%EF%BC%BB1+2%EF%BC%BD%29%29%EE%80%8A.jpg "ω: 0-→0+; θ: -90°→ 0°→ +90°; φ(ω): +90°→ 0°→ -90° 奈氏图如图5-40所示。 因为s 平面右半部的开环极点数P=0, 且奈氏曲线顺时针包围(-1, j0)点2次, 即N=-2, 则Z=P-N=2, 所以系统不稳定, 有两个闭环极点在s 平面右半部。用MATLAB绘制(-1, j0)点附近的奈氏图如图5-41所示, 其程序如下: nyquist([10], conv(conv([1 0], [1 1]), [1 2]))")
102
图 5-40 例 5-10 的奈氏图

103
图 5-41 MATLAB绘制例 5-10 的奈氏图

104
例 绘制开环传递函数为 的奈氏图, 并判断系统的稳定性。 解 开环幅频特性和相频特性分别为 从而有ω=0+时, A(ω)=∞, φ(ω)=-180°-Δ,Δ为正的很小量, 故奈氏图起点在第Ⅱ象限;ω=+∞时,A(ω)=0, φ(ω)=-360°+Δ, 故在第Ⅰ象限趋向终点(0, j0)。
=∞, φ(ω)=-180°-Δ,Δ为正的很小量, 故奈氏图起点在第Ⅱ象限;ω=+∞时,A(ω)=0, φ(ω)=-360°+Δ, 故在第Ⅰ象限趋向终点(0, j0)。 ")
105
系统开环传递函数有2个极点在s 平面的原点处, 因此奈氏回线中半径为无穷小量ε的半圆弧对应的映射曲线是一个半径为无穷大的圆弧:
ω:0-→0+; θ: -90°→0°→+90°; φ(ω): +180°→ 0°→-180° 奈氏图如图5-42所示。因为s平面右半部的开环极点数P=0, 且奈氏曲线顺时针包围(-1, j0)点2次, 即N=-2, 则Z=P-N=2, 所以系统不稳定, 有两个闭环极点在s平面右半部。用MATLAB绘制(-1, j0)点附近的奈氏图如图5-43所示,其程序如下: nyquist([10], conv(conv([1 0 0], [1 1]), [1 2]))
: +180°→ 0°→-180° 奈氏图如图5-42所示。因为s平面右半部的开环极点数P=0, 且奈氏曲线顺时针包围(-1, j0)点2次, 即N=-2, 则Z=P-N=2, 所以系统不稳定, 有两个闭环极点在s平面右半部。用MATLAB绘制(-1, j0)点附近的奈氏图如图5-43所示,其程序如下: nyquist([10], conv(conv([1 0 0], [1 1]), [1 2]))")
106
图 5-42 例 5-11 的奈氏图

107
图 5-43 MATLAB绘制例 5-11 的奈氏图

108
5.4.4 对数频率稳定判据 对数频率稳定判据实际上是奈氏判据的另一种形式, 即利用开环系统的伯德图来判别系统的稳定性。系统开环频率特性的奈氏图(极坐标图)和伯德图之间有如下对应关系: 奈氏图上以原点为圆心的单位圆对应于伯德图对数幅频特性的0分贝线; 奈氏图上的负实轴对应于伯德图上相频特性的-180°线。伯德图上,φ(ω)从-180°线以下增加到-180°线以上, 称为φ(ω)对-180°线的正穿越; 反之, 称为负穿越。
和伯德图之间有如下对应关系: 奈氏图上以原点为圆心的单位圆对应于伯德图对数幅频特性的0分贝线; 奈氏图上的负实轴对应于伯德图上相频特性的-180°线。伯德图上,φ(ω)从-180°线以下增加到-180°线以上, 称为φ(ω)对-180°线的正穿越; 反之, 称为负穿越。")
109
图 5-44 例 5-12 的伯德图

110
对数频率稳定判据可表述如下: 闭环系统稳定的充分必要条件是,当ω由0变到∞时, 在开环对数幅频特性L(ω)≥0的频段内, 相频特性φ(ω)穿越-180°线的次数(正穿越与负穿越次数之差)为P/2。P为s平面右半部开环极点数目。注意, 奈氏判据中, s沿着奈氏回线顺时针方向移动一周, 故ω由-∞变到∞, 所以伯德图中ω由0变到∞时, 穿越次数为P/2, 而不是P。 对于开环稳定的系统, 此时,P=0,若在L(ω)≥0的频段内, 相频特性φ(ω)穿越-180°线的次数(正穿越与负穿越之差)为0则闭环系统稳定; 否则闭环系统不稳定。
≥0的频段内, 相频特性φ(ω)穿越-180°线的次数(正穿越与负穿越之差)为0则闭环系统稳定; 否则闭环系统不稳定。 ")
111
例 系统开环传递函数为 试用对数稳定判据判断其稳定性。 解 伯德图如图5-44所示。 此系统的开环传递函数在s平面右半部没有极点,即P=0, 而在L(ω)≥0的频段内, 相频特性φ(ω)不穿越-180°线, 故闭环系统必然稳定。
≥0的频段内, 相频特性φ(ω)不穿越-180°线, 故闭环系统必然稳定。")
112
5.3 控制系统开环频率特性曲线的绘制 5.3.1 开环频率特性奈氏图的绘制 (1) 写出A(ω)和φ(ω)的表达式;
(2) 分别求出ω=0和ω=+∞时的G(jω); 确定起始点和终点 (3) 求奈氏图与实轴的交点 (4) 如果有必要, 可求奈氏图与虚轴的交点
 分别求出ω=0和ω=+∞时的G(jω); 确定起始点和终点. (3) 求奈氏图与实轴的交点. (4) 如果有必要, 可求奈氏图与虚轴的交点.")
113
(1) 如何计算A(ω)和φ(ω)的表达式;
开环频率特性 开环传递函数 惯性环节 一阶微分 积分环节

114
结论 ω=-∞ 到 ω=0 的奈奎斯特曲线运动轨迹和 从ω=0到ω=+∞的运动轨迹关于实轴对称 (2) 分析ω=0和ω=+∞时的G(jω);
ω=-∞ 到 ω=0 的奈奎斯特曲线运动轨迹和 从ω=0到ω=+∞的运动轨迹关于实轴对称 结论 ω=0时取决于积分环节的阶数,r个积分环节, 起始角度为 ω=+∞时取决于微分环节和惯性环节的阶数, m个一阶微分说明有 个相角位移 (n-r)个惯性环节说明 个相角位移
个惯性环节说明 个相角位移.")
115
5.3.2 开环频率特性伯德图的绘制 其中, Li(ω)=20lgAi(ω), (i=1, 2, …, n)。 具体如何画开环频率特性伯德图:两种方案 方案一:分别画出各自的对数曲线,然后叠加求最终结果 方案二:利用交接频率和各个环节的特性画

116
方案二,利用交接频率画 总结 1.确定低频段 低频段的斜率为-20νdB/dec, ν为开环系统中所包含的串联积分环节的数目。 20lgK, 纯微分(纯积分) 2.每遇一转折频率,改变一次斜率 惯性: 增加-20db/dec 振荡: 增加-40db/dec 一阶微分:增加+20db/dec 二阶微分:增加+40db/dec

117
例 5-7 已知系统的开环传递函数为 试绘制系统的伯德图。 解 将开环传递函数写成如下典型环节乘积形式: ω1=1.414, ω2=2, ω3=3 ζ= 0.354 振荡 20lgK=20lg7. 5=17.5 惯性 一阶微分

118
可见, 此系统由一个比例环节、一个积分环节、一个惯性环节、一个一阶微分环节和一个二阶振荡环节组成, 且ω1=1
可见, 此系统由一个比例环节、一个积分环节、一个惯性环节、一个一阶微分环节和一个二阶振荡环节组成, 且ω1=1.414, ω2=2, ω3=3。 20lgK=20lg7. 5=17.5。阻尼比ζ= 0.354。 在确定了各个环节的交接频率和20lgK的值以后, 可按下列步骤绘制系统的伯德图: (1) 通过点(1, 17.5)画一条斜率为-20dB/dec的直线, 它就是低频段的渐近线; (2) 在ω1=1.414处, 将渐近线的斜率从-20dB/dec改为-60 dB/dec, 这是考虑振荡环节的作用;
 通过点(1, 17.5)画一条斜率为-20dB/dec的直线, 它就是低频段的渐近线; (2) 在ω1=1.414处, 将渐近线的斜率从-20dB/dec改为-60 dB/dec, 这是考虑振荡环节的作用;")
119
(3) 由于一阶惯性环节的影响, 从ω2=2起, 渐近线斜率应减少20dB/dec, 即从原来的-60dB/dec变为-80dB/dec;
(5) 根据相频特性φ(ω), 求出若干点的相频特性曲线角度值, 如表5-6所示, 将各点光滑连接, 可以绘制系统的相频特性。 开环系统的伯德图如图5-30所示(虚线为渐近线)。 绘制程序如下: bode([10 30], conv(conv([1 0], [1 2]), [1 1 2]))
 根据相频特性φ(ω), 求出若干点的相频特性曲线角度值, 如表5-6所示, 将各点光滑连接, 可以绘制系统的相频特性。 开环系统的伯德图如图5-30所示(虚线为渐近线)。 绘制程序如下: bode([10 30], conv(conv([1 0], [1 2]), [1 1 2]))")
120
图 5-30 例 5-7 的伯德图

121
5.3.3 最小相位系统 大小与T的正负无关 大小与T的正负有关 各项时常数大小相同而符号不同的情况下,幅度特性完全相同 但各个传递函数的像移不同

122
5.3.3 最小相位系统 定义 :系统传递函数的极点和零点都位于s平面的左半部, 这种系统为最小相位系统,否则, 称为非最小相位系统。 上式中相角位移: 和 全为正,则可以对消,此时像移最小 和 有负数,必然相加结果不为最小 为什么? 零点由 决定 零、极点全在S平面左侧 极点由 决定

123
5.3.3 最小相位系统 当单回路系统中只包含比例、积分、微分、惯性和振荡环节时, 系统一定是最小相位系统。如果在系统中存在迟后环节或者不稳定的环节(包括不稳定的内环回路)时, 系统就成为非最小相位系统 对于最小相位系统, 对数幅频特性与相频特性之间存在着唯一的对应关系。 根据系统的对数幅频特性, 可以唯一地确定相应的相频特性和传递函数, 反之亦然。 但是, 对于非最小相位系统, 就不存在上述的这种关系。 实用的大多数系统为最小相位系统, 为了简化工作量, 对于最小相位系统的伯德图, 可以只画幅频特性。

124
例3:最小相系统Bode图如图,求传递函数
解: 低频段: 斜率 = -20db/dec 积分 W =1时, L(W) ≠0 比例 20 lgK = 40db K = 100 转折频率: db/dec 惯性 db/dec 一阶微分 db/dec 惯性 Gk(S) = (1/S)*(100)*{1/[1+(1/2)S]} *[1+(1/5)S]*{1/[1+(1/20)S]} = 800(S+5)/[S(S+2)(S+20)]
 ≠0 比例. 20 lgK = 40db. K = 100. 转折频率:2 -20db/dec 惯性 db/dec 一阶微分 db/dec 惯性. Gk(S) = (1/S)*(100)*{1/[1+(1/2)S]} *[1+(1/5)S]*{1/[1+(1/20)S]} = 800(S+5)/[S(S+2)(S+20)]")
125
5.4 频域(奈奎斯特)稳定性判据 用开环频率特性的奈奎斯特曲线判定闭环系统的稳定性 现有判断系统稳定性的方法 判断闭环传递函数的特征根
劳斯判据 为了保证系统稳定:特征方程 所有特征根在s平面的左侧 奈奎斯特稳定判据是将开环频率响应 与特征方程在s平面右半平面内的零点数和极点数联系起来的判据 用开环频率响应曲线分析系统稳定性,绕过了求解闭环极点的麻烦,工程上常用

126
5.4.1 基本原理 用开环频率特性的奈奎斯特曲线判定闭环系统的稳定性 闭环系统的稳定性,可以用系统的开环特性来判断。因 为开环模型中包含了闭环的所有元部件,包含了所有环节的 动态结构和参数。 由于闭环系统的稳定性取决于闭环特征根的性质,因此 用开环特性研究闭环的稳定性,首先应该明确开环特性与闭 环特征式的关系。

127
5.4.1 基本原理 稳定 特征方程: 所有特征根在s平面的左侧 构造辅助方程: F(s)具有以下特征 (4)F(s)的分子分母阶数相同 只要能证明F(s)的零点在s右半平面的个数为零就可以证明稳定
F(s)的分子分母阶数相同. 只要能证明F(s)的零点在s右半平面的个数为零就可以证明稳定.")
128
5.4.1 基本原理 中心思想:证明系统的闭环传递函数极点在s平面的右半平面的个数为零 方法:用开环传递函数的频率特性来分析上述问题 手段:构造辅助方程 证明F(s)的零点在s右半平面的个数为零
的零点在s右半平面的个数为零")
129
5.4.2映射定理 设有一复变函数为 结论 F(s)为单值连续函数 F(s)与s平面上的每一点一一对应 同理,s平面上任意一条闭合曲线,在F(s)上有一条对应的闭合曲线
为单值连续函数 F(s)与s平面上的每一点一一对应 同理,s平面上任意一条闭合曲线,在F(s)上有一条对应的闭合曲线")
130
5.4.2映射定理 结论 在s平面上有 一个闭合路径包围F(s)的一个零点, 则当围绕该路径绕顺时针转一圈,在F(s)平面上有一条对应的闭合回路绕原点顺时针一圈 在s平面上有 一个闭合路径包围F(s)的一个极点,则当围绕该路径绕顺时针转一圈,在F(s)平面上有一条对应的闭合回路绕原点逆时针一圈
的一个极点,则当围绕该路径绕顺时针转一圈,在F(s)平面上有一条对应的闭合回路绕原点逆时针一圈.")
131
5.4.2映射定理 在s平面上,如果闭合回路包围F(s)的P个极点,Z个零点,则在F(s)平面上对应有一条闭合回路绕原点逆时针旋转N圈,且 上式中,P为s平面上被顺时针包围的极点个数 N为s平面上被顺时针包围的零点个数 5.4.3 奈氏路径 为了判断闭环系统的稳定性, 需要检验F(s)是否有位于s 平面右半部的零点。为此可以选择一条包围整个s平面右半部(不经过零极点)的按顺时针方向运动的封闭曲线, 通常称为奈奎斯特回线, 简称奈氏路径
是否有位于s 平面右半部的零点。为此可以选择一条包围整个s平面右半部(不经过零极点)的按顺时针方向运动的封闭曲线, 通常称为奈奎斯特回线, 简称奈氏路径.")
132
无积分环节,虚轴上无极点 5.4.4 奈奎斯特稳定判据(对零型系统) 结论 也就是说,在 平面上不会造成对(-1,j0)的顺时针围绕 闭环控制系统稳定的充分必要条件是F(s)在s的右半平面无零点,即s平面上的奈氏路径,不会在F(s)平面上的原点出造成顺时针围绕 是 的右移1个单位,所以F(s)的原点是 平面上的的(-1,j0) 是开环传递函数的奈奎斯特曲线
的原点是 平面上的的(-1,j0) 是开环传递函数的奈奎斯特曲线.")
133
奈氏轨迹的组成 对应 上的曲线 由映射定理:系统稳定的充要条件:F(jw)在右半平面无零点
对应 上的曲线 由映射定理:系统稳定的充要条件:F(jw)在右半平面无零点 即:S平面上的奈氏轨迹不造成F(jw)平面上的轨迹围绕原点顺时针旋转 1. F(jw)在右半平面无极点时,F(jw)平面上的轨迹不包围F(jw)平面原点 即:轨迹与实轴的交点在均在原点右侧 2. F(jw)在右半平面P个有极点时,F(jw)平面上的轨迹围绕原点逆时针旋转P圈
在右半平面无零点. 即:S平面上的奈氏轨迹不造成F(jw)平面上的轨迹围绕原点顺时针旋转. 1. F(jw)在右半平面无极点时,F(jw)平面上的轨迹不包围F(jw)平面原点. 即:轨迹与实轴的交点在均在原点右侧. 2. F(jw)在右半平面P个有极点时,F(jw)平面上的轨迹围绕原点逆时针旋转P圈.")
134
是 的右移1个单位,所以F(s)的原点是 平面上的的(-1,j0)
由映射定理:系统稳定的充要条件:F(jw)在右半平面无零点 即:S平面上的奈氏轨迹不造成F(jw)平面上的轨迹围绕原点顺时针旋转 1. F(jw)在右半平面无极点时,F(jw)平面上的轨迹不包围F(jw)平面原点 即:轨迹与实轴的交点在均在原点右侧 2. F(jw)在右半平面P个有极点时,F(jw)平面上的轨迹围绕原点逆时针旋转P圈 奈奎斯特稳定判据(零型系统) 即:S平面上的奈氏轨迹不造成 开环传递函数奈氏曲线围绕原点顺时针旋转 1. 开环传函在右半平面无极点时,奈氏曲线不包围(-1,j0) 即:奈氏曲线与实轴的交点在(-1,j0)和原点之间 2. 开环传函在右半平面P个有极点时,奈氏曲线围绕(-1,j0)逆时针旋转P圈
在右半平面无零点. 即:S平面上的奈氏轨迹不造成F(jw)平面上的轨迹围绕原点顺时针旋转. 1. F(jw)在右半平面无极点时,F(jw)平面上的轨迹不包围F(jw)平面原点. 即:轨迹与实轴的交点在均在原点右侧. 2. F(jw)在右半平面P个有极点时,F(jw)平面上的轨迹围绕原点逆时针旋转P圈. 奈奎斯特稳定判据(零型系统) 即:S平面上的奈氏轨迹不造成 开环传递函数奈氏曲线围绕原点顺时针旋转. 1. 开环传函在右半平面无极点时,奈氏曲线不包围(-1,j0) 即:奈氏曲线与实轴的交点在(-1,j0)和原点之间. 2. 开环传函在右半平面P个有极点时,奈氏曲线围绕(-1,j0)逆时针旋转P圈.")
135
5.4.4 奈奎斯特稳定判据 系统的开环频率特性曲线 当 从 变化时,在 平面上,奈氏曲线绕(-1,j0)这个点逆时针旋转的次数为 ω 上式中,P为开环传递函数在右半平面的极点个数 闭环控制系统稳定的充分必要条件是 P=0时,开环传递函数的奈奎斯特曲线不包围(-1,j0) 时,开环传递函数有P个极点在s右半平面,则开环传递函数奈奎斯特曲线要围绕(-1,j0)逆时针转P圈 N=P, Z=0 围绕(-1,j0)的转圈只能由P造成,不能由Z造成
 时,开环传递函数有P个极点在s右半平面,则开环传递函数奈奎斯特曲线要围绕(-1,j0)逆时针转P圈. N=P, Z=0. 围绕(-1,j0)的转圈只能由P造成,不能由Z造成.")
136
5.4.4 奈奎斯特稳定判据 系统开环传递函数的完整奈奎斯特曲线 从 变化时,奈氏曲线围绕(-1,j0)点逆时针旋转P次,则闭环系统稳定,其中P为开环传函在右半平面的极点个数。 ω 闭环控制系统稳定的充分必要条件是 P=0时,开环传递函数的奈奎斯特曲线不包围(-1,j0) 时,开环传递函数有P个极点在s右半平面,则开环传递函数奈奎斯特曲线要围绕(-1,j0)逆时针转P圈 N=P, Z=0 围绕(-1,j0)的转圈只能由P造成,不能由Z造成
 时,开环传递函数有P个极点在s右半平面,则开环传递函数奈奎斯特曲线要围绕(-1,j0)逆时针转P圈. N=P, Z=0. 围绕(-1,j0)的转圈只能由P造成,不能由Z造成.")
137
例5-8 某系统开环频率特性的正频段如图中的实线所示,并已知其开环系统稳定。试判断闭环系统的稳定性。
解 系统开环稳定,所以P=0; 补画频率特性的负频段,如图中的虚线所示。 从图中看到,当w从-∞向+∞变化时,G(jw)H(jw)曲线不包围(-1,j0)点,即N = 0; 因此Z=N+P=0,闭环系统是稳定的
H(jw)曲线不包围(-1,j0)点,即N = 0; 因此Z=N+P=0,闭环系统是稳定的.")
138
例 5-9 已知开环传递函数为 试绘制(1) K=5, (2) K=10时的奈氏图, 并判断系统的稳定性。 解 (1) 当K=5时, 开环幅频特性和相频特性分别为
 K=5, (2) K=10时的奈氏图, 并判断系统的稳定性。 解 (1) 当K=5时, 开环幅频特性和相频特性分别为")
139
奈氏图如图5-37所示。 因为s平面右半部的开环极点数P=0, 且奈氏曲线不包围(-1, j0)点, 即N = 0, 则Z=P-N =0, 所以系统稳定。
点, 即N = 0, 则Z=P-N =0, 所以系统稳定。")
140
(2) 当K=10时, 奈氏图形状与(1)相同, 只是以坐标原点为中心, 向外“膨胀”而已。“膨胀”的倍数为10/5=2, 故与实轴的交点的横坐标在(-0.59×2, -0.66×2)之间, 即交点在(-1, j0)点的左侧。 因为s 平面右半部的开环极点数P=0, 且奈氏曲线顺时针包围(-1, j0)点2次, 即N=-2, 则Z=P-N=2, 所以系统不稳定, 有两个闭环极点在s 平面右半部。 用MATLAB绘制的奈氏图如图 5-38 所示, 其程序如下: nyquist([5], conv(conv([1 0.5], [1 1]), [1 2]))
, [1 2]))")
141
图 MATLAB绘制例 5-9 的奈氏图

142
原点处有极点,与奈奎斯特路径不能经过零极点的定义相悖
5.4.3 非零型系统的奈氏盘踞(原点处有开环极点) 原点处有极点,与奈奎斯特路径不能经过零极点的定义相悖 为了在这种情况下应用奈氏判据, 可以选择图5-39所示的奈氏回线, 此奈氏路径经过以坐标原点为圆心, 以无穷小量ε为半径的, 在s平面右半部的小半圆, 绕过了开环极点所在的原点。 当ε→0时, 此小半圆的面积也趋近于零。因此, F(s)的位于s平面右半部的零点和极点均被此奈氏回线包围在内,而将位于坐标原点处的开环极点划到了左半部。
 原点处有极点,与奈奎斯特路径不能经过零极点的定义相悖. 为了在这种情况下应用奈氏判据, 可以选择图5-39所示的奈氏回线, 此奈氏路径经过以坐标原点为圆心, 以无穷小量ε为半径的, 在s平面右半部的小半圆, 绕过了开环极点所在的原点。 当ε→0时, 此小半圆的面积也趋近于零。因此, F(s)的位于s平面右半部的零点和极点均被此奈氏回线包围在内,而将位于坐标原点处的开环极点划到了左半部。")
143
当s沿着上述小半圆移动时, 有 当ω从0-沿小半圆变到0+时, s按逆时针方向旋转了180°, G(s)H(s)在其平面上的映射为 ν为系统中串联的积分环节数目。
H(s)在其平面上的映射为 ν为系统中串联的积分环节数目。")
144
当s沿着原点处的小半圆逆时针移动时,映射在F(s)平面上的曲线为半径半径是无穷大的一段圆弧,圆弧旋转的角度为
当系统有v个积分环节时,系统的完整开环奈氏图要在原始奈氏图上增补 频段上半径为无穷大,顺时针旋转过 的一段圆弧 将 和 连起来,形成一个闭合曲线 为什么零型系统不需要做这件事? 其奈奎斯特曲线本就是一条闭合曲线

145
例 绘制开环传递函数为 的奈氏图, 并判断系统的稳定性。 一个积分环节 解 开环幅频特性和相频特性分别为

146
ω=0+时, A(ω)=∞, φ(ω)=(-90°-Δ), Δ为正, 故起点在第Ⅲ象限; ω=+∞时, A(ω) =0, φ(ω)=(-270°+Δ), 在第Ⅱ象限趋向终点(0, j0)。 因为相角范围从-90°到-270°, 所以必有与负实轴的交点。由φ(ω)=-180°得 即 上式两边取正切, 得0.5ω=1/ω, 即ω=1.414, 此时A(ω)=1.67。 因此奈氏图与实轴的交点为(-1.67, j0)。
=1.67。 因此奈氏图与实轴的交点为(-1.67, j0)。")
147
系统开环传递函数有一极点在s平面的原点处, 因此奈氏路径中半径为无穷小量ε的半圆弧对应的映射曲线是一个半径为无穷大的圆弧相移量为 ,顺时针:
(-1.67, j0) (-1,j0) 的奈氏曲线 的奈氏曲线 系统开环传递函数有一极点在s平面的原点处, 因此奈氏路径中半径为无穷小量ε的半圆弧对应的映射曲线是一个半径为无穷大的圆弧相移量为 ,顺时针:
 (-1,j0) 的奈氏曲线. 的奈氏曲线. 系统开环传递函数有一极点在s平面的原点处, 因此奈氏路径中半径为无穷小量ε的半圆弧对应的映射曲线是一个半径为无穷大的圆弧相移量为 ,顺时针:")
148
所以系统不稳定, 有两个闭环极点在s 平面右半部
因为s 平面右半部的开环极点数P=0 且奈氏曲线顺时针包围(-1, j0)点2次 所以系统不稳定, 有两个闭环极点在s 平面右半部
点2次. 所以系统不稳定, 有两个闭环极点在s 平面右半部.")
149
例 绘制开环传递函数为 的奈氏图, 并判断系统的稳定性。 解 开环幅频特性和相频特性分别为 从而有ω=0+时, A(ω)=∞, φ(ω)=-180°-Δ,Δ为正的很小量, 故奈氏图起点在第Ⅱ象限;ω=+∞时,A(ω)=0, φ(ω)=-360°+Δ, 故在第Ⅰ象限趋向终点(0, j0)。
=∞, φ(ω)=-180°-Δ,Δ为正的很小量, 故奈氏图起点在第Ⅱ象限;ω=+∞时,A(ω)=0, φ(ω)=-360°+Δ, 故在第Ⅰ象限趋向终点(0, j0)。 ")
150
的奈氏曲线 系统开环传递函数有2个极点在s 平面的原点处 从 开始,由无穷远顺时针绕 回到无穷远处的
从 开始,由无穷远顺时针绕 回到无穷远处的 因为s平面右半部的开环极点数P=0, 且奈氏曲线顺时针包围(-1, j0)点2次,所以系统不稳定, 有两个闭环极点在s平面右半部。
点2次,所以系统不稳定, 有两个闭环极点在s平面右半部。")
151
开环极点在右半平面的个数 5.4.5 奈奎斯特稳定判据简易求法
如果完整的开环奈氏曲线比较复杂,“数包围次数”比较麻烦,可以采用引入正负“穿越”的次数来计算奈氏曲线包围点(-1,j0)的圈数 开环极点在右半平面的个数
的圈数. 开环极点在右半平面的个数.")
152
N=N+-N- 开环幅相曲线自上向下穿越-1之左为正穿越,用N+表示; 开环幅相曲线自下向上穿越-1之左为负穿越,用N-表示; -1 -1
必须是 实轴 (-1,0) 之左侧 G(jω)H (jω)起始于或终止于-1之左实轴,为半次穿越 -1 -1
 之左侧. G(jω)H (jω)起始于或终止于-1之左实轴,为半次穿越")
153
(a) (b) 解: (a) p=1, 系统不稳定 (b) p=2, 系统稳定 N=N+-N- ω ω=0 ω ω=∞ N+ -1 -1
EG.已知奈氏曲线,判稳 -1 Re Im ω=0 ω ω=∞ P=2 (b) P=1 ω=0 ω -1 Re Im ω=∞ (a) 解: (a) p=1, 系统不稳定 (b) p=2, 系统稳定
 P=1. ω=0. ω. -1. Re. Im. ω=∞ (a) 解: (a) p=1, 系统不稳定. (b) p=2, 系统稳定.")
154
N+ N=N+-N- -1 -1 N- j -1 [G(j)] 最小项:所有项为正,P=0
![N+ N=N+-N- N- j -1 [G(j)] 最小项:所有项为正,P=0](http://slidesplayer.com/slide/11175697/60/images/154/N%EF%BC%8B+N%3DN%EF%BC%8B-N%EF%BC%8D+N%EF%BC%8D+j+-1+%5BG%28j%EF%81%B7%29%5D+%E6%9C%80%E5%B0%8F%E9%A1%B9%EF%BC%9A%E6%89%80%E6%9C%89%E9%A1%B9%E4%B8%BA%E6%AD%A3%EF%BC%8CP%3D0.jpg "N+ N=N+-N- N- j -1 [G(j)] 最小项:所有项为正,P=0")
155
用奈奎斯特曲线判断稳定判据的时候,我们关注的: 负实轴上(-1,j0)左侧,奈氏曲线穿越负实轴的次数
5.4.4 对数频率稳定判据 用奈奎斯特曲线判断稳定判据的时候,我们关注的: 负实轴上(-1,j0)左侧,奈氏曲线穿越负实轴的次数 奈氏图与伯德图之间的关系 奈氏图中的单位圆 与伯德图中的幅频特性横轴 对称 单位圆之外的部分, 对应伯德图中实轴以上的部分 奈氏图的负实轴 对应伯德图中相频特性中的 这条直线 开环频率奈氏曲线在负实轴上(-1,j0)左侧的穿越数,等价用对数幅频特性中 的区间内, 曲线与 线的交点数来计算 正穿越 负穿越
左侧,奈氏曲线穿越负实轴的次数. 奈氏图与伯德图之间的关系. 奈氏图中的单位圆 与伯德图中的幅频特性横轴 对称. 单位圆之外的部分, 对应伯德图中实轴以上的部分. 奈氏图的负实轴 对应伯德图中相频特性中的 这条直线. 开环频率奈氏曲线在负实轴上(-1,j0)左侧的穿越数,等价用对数幅频特性中. 的区间内, 曲线与 线的交点数来计算. 正穿越. 负穿越.")
156
例 系统开环传递函数为 试用对数稳定判据判断其稳定性。 解 伯德图如图5-44所示。 此系统的开环传递函数在s平面右半部没有极点,即P=0, 而在L(ω)≥0的频段内, 相频特性φ(ω)不穿越-180°线, 故闭环系统必然稳定。
≥0的频段内, 相频特性φ(ω)不穿越-180°线, 故闭环系统必然稳定。")
157
5.5 稳 定 裕 度 系统开环奈奎斯特曲线离(-1,j0)的距离 为1时,相角离 的关系 相位裕度 可能相交的情况
为1时,相角离 的关系 相位裕度 可能相交的情况 为-180°时,幅值 与 1 的关系 幅值裕度 对于一个稳定的最小相位系统, 其相角裕度应为正值, 增益裕度为正。

159
例 单位反馈系统开环传递函数为 分别求取K1=10及K1 =100时的相角裕度和增益裕度。 相角裕度 增益裕度

160
5.6 系统特性与开环频率特性的关系 由外部输入信号的时间响应特性分析 时域性能指标 直观,准确 系统性能的优劣评价 频域性能指标 应用广泛,与时域有对应关系 由频率特性分析 从不同的角度描述系统的固有性能 常对系统进行定量的分析 常对系统进行定性的分析

161
常将开环频率特性分成低、中、高三个频段。
5.6.1开环幅频特性与系统特性的关系 常将开环频率特性分成低、中、高三个频段。 L(ω)dB ω -40dB/dec -20dB/dec ωc ω2 ω1 低频段 高频段 中频段
dB. ω. -40dB/dec. -20dB/dec. ωc. ω2. ω1. 低频段. 高频段. 中频段.")
162
低频段:第一个转折频率之前的频段 ---反映系统的稳态性能 ν 低频段由积分环节和比例环节构成: K K G(jω)= G(s)=
—低频段的斜率 K —低频段的高度 低频段开环增益K 越大,稳态误差越小 积分环节越多,系统稳态误差趋于零的情况越多 参见第三章“稳态误差” 零型系统、I型系统等对不同输入信号的跟随能力

163
2. 中频段: 穿越频率ωc附近的区段为中频段。 它反映了系统动态响应的稳定性和快速性。 ωc ω2 ω ω1 L(ω)dB 低频段 高频段
-40dB/dec -20dB/dec ωc ω2 ω1 低频段 高频段 中频段

164
设系统中频段斜率为-20dB/dec且中频段比较宽。可近似认为整个曲线是一条斜率为-20dB/dec的直线。
+20 -20dB/dec ωc ω L(ω)dB -20 开环传递函数: G(s)≈ = s K ωc 中频段对数幅频特性曲线
dB 开环传递函数: G(s)≈ = s. K. ωc. 中频段对数幅频特性曲线.")
165
在一定条件下, ωc越大,ts 就越小,系统响应也越快。此时,穿越频率ωc 反映了系统响应的快速性。 Φ(s)= G(s) 1+G(s)
+20 -20dB/dec ωc ω L(ω)dB -20 中频段对数幅频特性曲线 开环传递函数: G(s)≈ = s K ωc -90° 闭环传递函数为: 相位裕度够大 = = s ωc 1 1+ s+1 在一定条件下, ωc越大,ts 就越小,系统响应也越快。此时,穿越频率ωc 反映了系统响应的快速性。 Φ(s)= G(s) 1+G(s) 相当于一阶系统 调节时间: ωc ts≈3T= 3
dB 中频段对数幅频特性曲线. 开环传递函数: G(s)≈ = s. K. ωc. -90° 闭环传递函数为: 相位裕度够大. = = s. ωc s+1. 在一定条件下, ωc越大,ts 就越小,系统响应也越快。此时,穿越频率ωc 反映了系统响应的快速性。 Φ(s)= G(s) 1+G(s) 相当于一阶系统. 调节时间: ωc. ts≈3T= 3.")
166
中频段斜率为-40dB/dec ,所占频率区间不能过宽,否则系统平稳性难以满足要求。通常,取中频段斜率为-20dB/dec 。 s2 ωc2
(2)中频段的斜率与动态性能的关系 中频段斜率为-40dB/dec ,所占频率区间不能过宽,否则系统平稳性难以满足要求。通常,取中频段斜率为-20dB/dec 。 s2 ωc2 Φ(s)= G(s) 1+G(s) = 1+ ωc2 s2+ωc2 = 设系统中频段斜率为-40dB/dec,且中频段较宽,可近似认为整个曲线是一条斜率为-40dB/dec的直线。 阻尼比为零系统处于临界稳定状态。 开环传递函数: G(s)≈ = s2 K ωc2 ω L(ω)/dB -40dB/dec +20 -20 ωc -180° 闭环传递函数为: 相位裕度过小,在截止频率处接近-180°
中频段的斜率与动态性能的关系. 中频段斜率为-40dB/dec ,所占频率区间不能过宽,否则系统平稳性难以满足要求。通常,取中频段斜率为-20dB/dec 。 s2. ωc2. Φ(s)= G(s) 1+G(s) = 1+ ωc2. s2+ωc2. = 设系统中频段斜率为-40dB/dec,且中频段较宽,可近似认为整个曲线是一条斜率为-40dB/dec的直线。 阻尼比为零系统处于临界稳定状态。 开环传递函数: G(s)≈ = s2. K. ωc2. ω. L(ω)/dB. -40dB/dec ωc. -180° 闭环传递函数为: 相位裕度过小,在截止频率处接近-180°")
167
3 .高频段 一般 L(ω) = 20lg|G(jω)|<<0 |G(jω) |<<1 即 |G(jω)|
高频段对应系统的时间常数小,对系统动态性能影响不大。 高频段反映了系统对高频干扰信号的抑制能力。高频段的分贝值越低,系统的抗干扰能力越强。

168
5.6 系统动态特性和开环频域特性的关系 若取Δ=5%

169
用开环频率特性研究系统动态性能常用截止频率 和相位裕度 这两个量来进行表征
5.6 系统动态特性和开环频域特性的关系 用开环频率特性研究系统动态性能常用截止频率 和相位裕度 这两个量来进行表征 用时域特性研究系统动态性能常用阻尼比 和震荡频率 这两个量来进行表征 已知 因此,只要找出频率特性中两个常用特征量与时域两个常用特征量之间的关系,就能分析出频率特性与动态性能之间的关系 以二阶系统为例

170
1.相位裕度 与超调量之间的关系 分析 与阻尼比的关系 二阶系统闭环传递函数 开环传递函数:

171
截止频率处

172
有了 和 与 的关系,就可以分析相角裕度与时域参数的关系
相位裕度仅与阻尼比有关,因此相位裕度可以用来表征超调量

173
在一定范围内,近似为 阻尼比越大, 相位裕度越大 越大系统平稳性越好

174
(2)相位裕量 和调节时间 之间的关系 越大系统快速性越好 一定时, 与剪切频率成反比
相位裕量 和调节时间 之间的关系 越大系统快速性越好 一定时, 与剪切频率成反比")
175
§ 系统的频率特性及频域性能指标 一、二阶系统

176
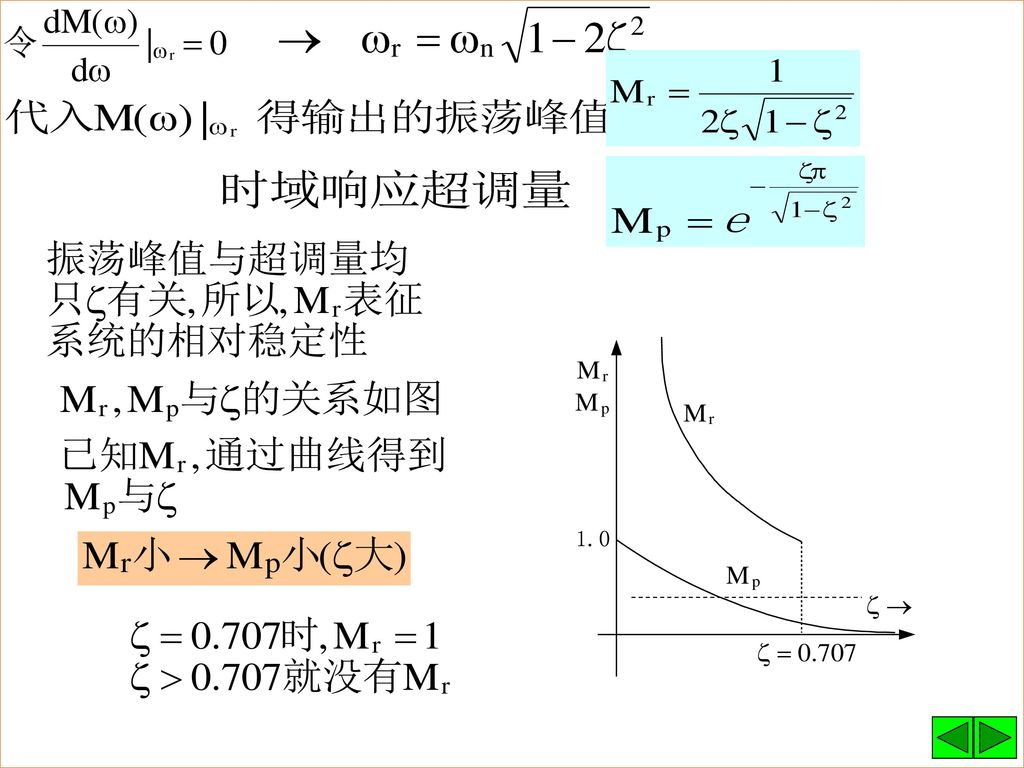
闭环频率特性 求法: 根据开环频率特性求 步骤: 画开环频率特性Bode图再映射到有等M圆的对数幅 相图中,就可以得到M()~ 的关系 指标: 谐振峰值Mr: 谐振频率r: 截止频率b: 增益衰减至 70.7%时的频率 与时域性能的关系:

179
谐振频率

180
作业 例1:已知最小相位系统的渐近幅频特性如图所示, 试确定系统的传递函数。

181
作业 例2:已知最小相位开环系统的渐近对数幅频特性如图所示, 试: (1) 求取系统的开环传递函数。 (2) 用稳定裕度判断系统稳定性。
﹣60dB/dec 10 0.1 20lgG/dB ﹣20dB/dec ﹣40dB/dec 40 (1) 求取系统的开环传递函数。 (2) 用稳定裕度判断系统稳定性。 要求系统具有30º的稳定裕度, 求开环放大倍数应改变的倍数。
 求取系统的开环传递函数。 (2) 用稳定裕度判断系统稳定性。 要求系统具有30º的稳定裕度, 求开环放大倍数应改变的倍数。")
182
作业 例3:设某单位负反馈系统的前向通道的传递函数为 :
例3:设某单位负反馈系统的前向通道的传递函数为 : 求: ⑴计算系统的剪切频率ωC及相位裕度 γ ; ⑵计算系统闭环幅频特性的相对谐振峰值 及谐振频率 ωr

183
作业 例4:已知





辦桌文化起始略說: 1. 祭祀宗教 2. 生命禮儀 3. 外燴 --- 老師、師公、師傅、總鋪師 4. 搬桌搬椅時代 (二) 食物食材 1. 靠山考海 2. 基本:炒米粉、糍、檳榔 3. 小吃搬上桌 (三) 變變變 1. 調味不同 2. 師承不同 3. 地點也變.>")



 人大版本 吕 昌.>")
 陳可兒 (4F03) 張令宜 (4F05) 何秀欣 (4F14) 潘美玲>")


 冷战时期美苏关系的演变.>")







