Download presentation
1
上海天文台1.56M望远镜 现状及未来设想 上海天文台 潘红鑑

2
主要内容 现状: 上海天文台1.56米望远镜 主要设备、终端及运行情况 设想: 望远镜改造、白天合作目标 (激光卫星)的激光测距、
夜间空间碎片漫反射激光测 距。

3
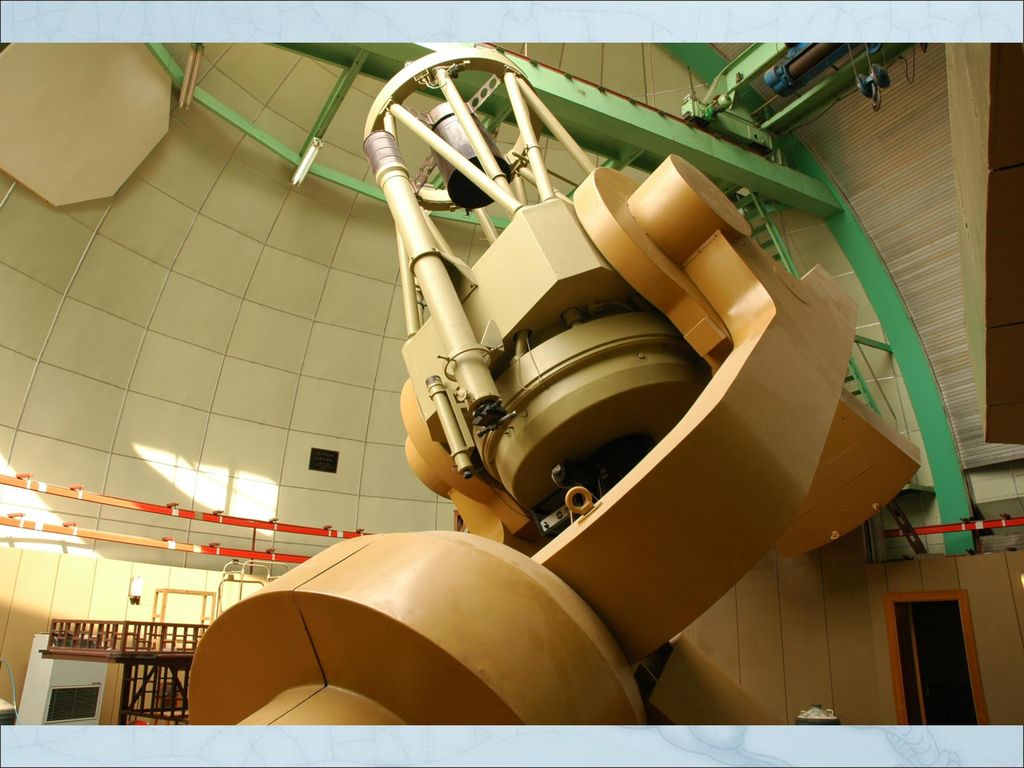
一、现 状 1. 主要设备 实验室主要设备1.56米反射望远镜,是由上海天文台自行设计、制造的第一架大型光学天文望远镜。它的主镜直径1.58米,通光口径1.56米,焦比1:10,建成于1987年。在天体测量学科领域,是当时世界上口径最大的光学望远镜。

5
望远镜的主、副镜均采用微晶玻璃,并在国内首次实现大口径的消球差、消彗差的RC光学系统,可以保证在30角分的大视场范围内得到好于1角秒的成像质量。

6
自动调焦系统使得望远镜不受温度变化的影响。机械上采用的全焊接结构和油垫静压轴承系统,大大减轻了望远镜的运转负荷,提高了运转的稳定性。同时,在国内首次实现了数字调速的控制系统,可以方便地追踪非恒动的天体目标。

7
目前主要使用CCD照相机作成像观测。1.56米望远镜的研制与科研产出获得过国家科技进步一等奖以及众多的省部级自然科学与科技进步奖项。

8
2.相关配备 CCD照相机 目前使用在美国加州大学Lick天文台研制2048*2048 CCD照相机。视场是10′50″

9
芯片型号 SITe SI-424AB 芯片尺寸 2048×2048 象素大小 24μm×24μm 电荷转移效率 0.99999
CCD照相机主要技术参数如下: 芯片型号 SITe SI-424AB 芯片尺寸 ×2048 象素大小 μm×24μm 电荷转移效率 满阱电荷 ,000 e- 读出噪声 e-

10
量子效率图

11
2.相关配备 缩焦器 由于CCD照相机视场较小,我们另配有缩焦器,其视场可扩大至22′。

12
2.相关配备 滤光片 望远镜配备UBVRI宽带滤光片为使我们的测光系统与标准Johnson系统尽可能接近,我们采用了Bessell(1990)对CCD作为探测器所需的滤光片组合的建议。
对CCD作为探测器所需的滤光片组合的建议。")
13
滤光片 具体情况如下: U:1mmUG1+1mmBG39+3mmWG305 B:2mmGG385+1mmBG12+2mmBG39 V:2mmGG495+3mmBG39 R:2mmOG570+3mmKG3 I:3mmRG9+2mmWG305

14
3.观测条件 1)观测晴夜 根据2006-2010年实际观测统计,佘山基地的可观测晴夜数为平均每年159夜左右。
观测晴夜 根据2006-2010年实际观测统计,佘山基地的可观测晴夜数为平均每年159夜左右。")
15
观测夜月平均分布图

16
从上图中可以看出,佘山观测基地天气特点是晴夜分布的月变化较大,六月份晴夜数最少,其次四月份。六月份正值江南梅雨天气,很少有观测晴夜,比较突出的是每年8-9月份,其它观测基地雨水较多,而佘山观测基地却有较多的晴夜。

17
特别在副热带高压控制长江流域时的酷暑高温天气是观测较有利之时,不但天气晴朗而且视宁度较好。

18
2)视宁度(seeing) 佘山观测基地的视宁度较好,由于我们没有专门的视宁度测试设备,我们以观测星像的半极大全宽 FWHM 作为视宁度好坏依据。该望远镜的FWHM值通常在1.〞5左右,变化范围在1.〞1—1.〞9之间。
视宁度(seeing) 佘山观测基地的视宁度较好,由于我们没有专门的视宁度测试设备,我们以观测星像的半极大全宽 FWHM 作为视宁度好坏依据。该望远镜的FWHM值通常在1.〞5左右,变化范围在1.〞1—1.〞9之间。")
19
目前在正常天气及仪器条件下,露光5-10分钟使用R滤光片,约16等的点源可以测量,
3)夜天光背景 佘山地区目前夜天光背景比较亮,但其变化已趋于稳定。 目前在正常天气及仪器条件下,露光5-10分钟使用R滤光片,约16等的点源可以测量, V滤光片,14等点源可以测量。
夜天光背景. 佘山地区目前夜天光背景比较亮,但其变化已趋于稳定。 目前在正常天气及仪器条件下,露光5-10分钟使用R滤光片,约16等的点源可以测量, V滤光片,14等点源可以测量。")
20
4)研究课题 河外致密变源的监测与研究;AGN的国际联测;高自行星的观测与研究;星团的运动学和动力学研究;球状星团小变幅新类型变星;类星体短时标光变的探测;土星和天王星卫星定位观测研究;射电源光学对应体的精确测定;太阳系小天体等等。
研究课题 河外致密变源的监测与研究;AGN的国际联测;高自行星的观测与研究;星团的运动学和动力学研究;球状星团小变幅新类型变星;类星体短时标光变的探测;土星和天王星卫星定位观测研究;射电源光学对应体的精确测定;太阳系小天体等等。")
21
二、未来设想 近十多年来,佘山地区夜天光背景越来越亮。从1994年至2007年,V波段每平方角秒从19mag变到15.8mag(国际优良台站好于21.5mag)。
。")
22
二、未来设想 现在用1.56米对暗于14mag星做精确测光已很困难。 在一般天文观测研究领域,1.56米望远镜难以发挥其大口径的优势。

23
考虑到1.56米口径较大、焦距较长(15.6米)、光学质量较好,加上佘山地区大气宁静度较小的优势。
在保持原来功能的基础上,增加对夜天光要求不高,但对望远镜口径、焦距和大气视宁度有较高要求的观测课题。

24
经过初步调研,计划在1.56米望远镜上开展白天合作目标(激光卫星)的激光测距、夜间空间碎片漫反射激光测距,为空间碎片碰撞预警提供高精度测距资料。
的激光测距、夜间空间碎片漫反射激光测距,为空间碎片碰撞预警提供高精度测距资料。")
25
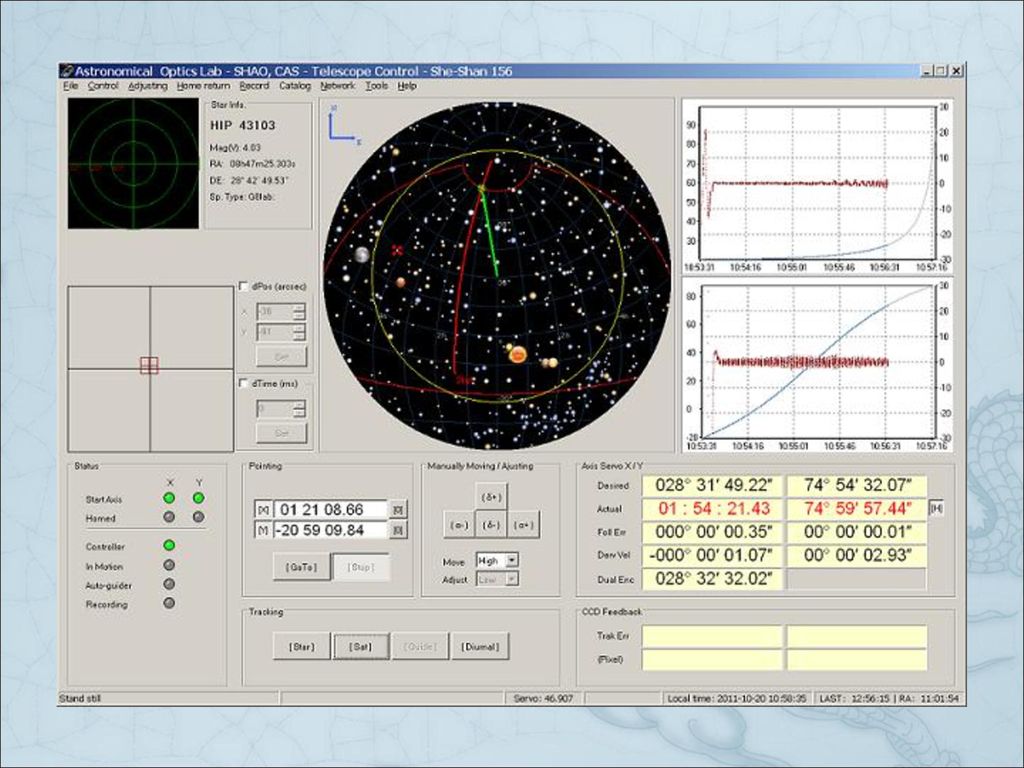
为实现上述目标,需对望远镜轴系驱动控制系统进行改造,以满足快速和高精度跟踪的要求。
近期已基本完成了适应性改造的调试工作。

27
servo following Error X (arcsec) Peak: RMS: 0.386 Tracking Error X (pixel) Peak: RMS: 0.000 Tracking Error X (arcsec) Peak: RMS: Pixel scale is: 0.144 servo following Error Y (arcsec) Peak: RMS: 0.906 Tracking Error Y (pixel) Peak: RMS: 0.000 Tracking Error Y (arcsec) Peak: RMS: Pixel scale is: 0.144 跟踪结果
 Peak: RMS: Tracking Error X (pixel) Peak: RMS: Tracking Error X (arcsec) Peak: RMS: Pixel scale is: servo following Error Y (arcsec) Peak: RMS: Tracking Error Y (pixel) Peak: RMS: Tracking Error Y (arcsec) Peak: RMS: Pixel scale is: 跟踪结果.")
28
有了以上的跟踪精度保障,充分利用上海台60CM激光人卫测距望远镜就在旁边的有利条件,近期正在研制安装激光接收器开展漫反射激光测距的工作。

29
期待未来几年在白天合作目标(激光卫星)的激光测距和夜间空间碎片漫反射激光测距方面有所收获,为空间碎片碰撞预警提供高精度测距资料。
高分辨率成像、在地影中的监测……

30
谢谢大家!






 1.以大盤指數為標的之權證,和大盤指數的連動性,為什麼比和期交所期指的連動性差?>")














