Download presentation
Presentation is loading. Please wait.

1
虚拟样机技术入门与应用--3 虚拟样机建模

2
3.1 几何建模预备知识 几何体类型 几何体坐标系 几何体的命名 几何建模的准备 4种类型的几何体:刚性形体、柔性形体、点质量和地基形体
每一个新产生的几何体都设有一个参考坐标---构件机架坐标系 几何体的命名 POINT_MASS_1, POINT_MASS_2 PART_1, PART_2 几何建模的准备 显示工作栅格平面 显示坐标窗口

3
3.2 几何建模工具----使用主工具箱建模 用鼠标右键选择上部的几何建模按钮 主动显示所选建模工具基本参数设置对话栏
浮动建模工具和基本参数设置对话框 取默认值作为参数值,输入或选择新的参数值 按照屏幕下方状态栏的提示,绘制几何图形

4
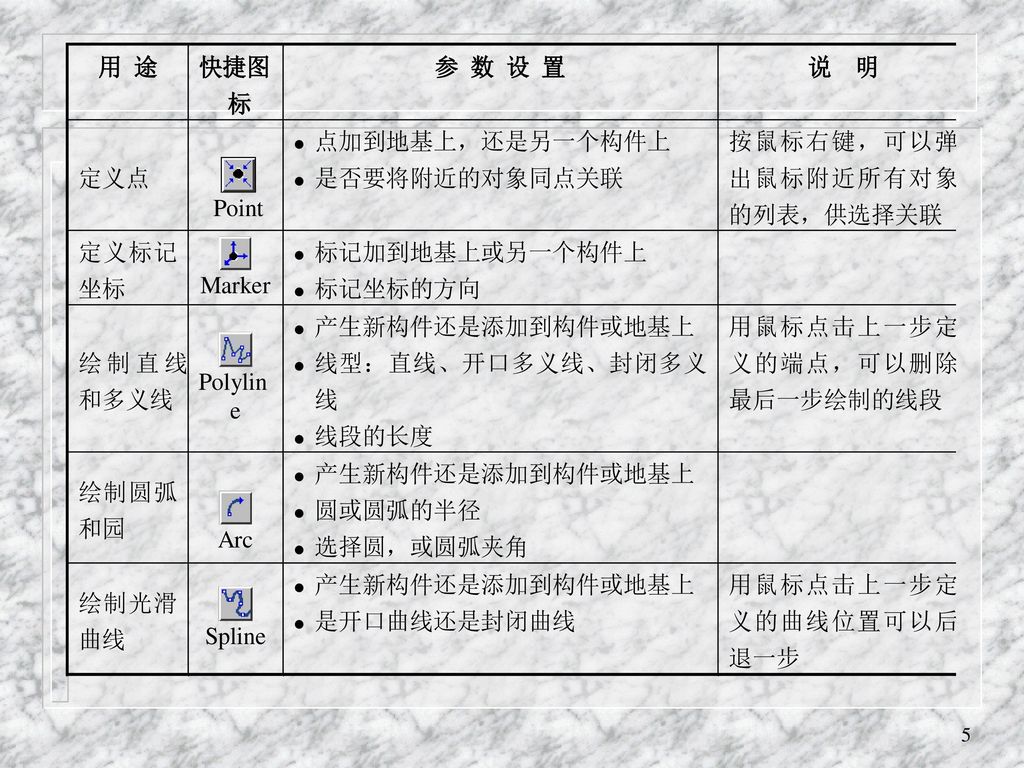
3. 3 绘制基本几何形状 基本几何形状包括:点、直线、曲线和标记坐标等 没有质量,主要用于定义其他的几何形状和形体。
标记坐标具有位置和方向,可用于定义力的作用位置,定义构件的几何形状和方向、形心的位置,定义构件的约束位置和方向,定义运动的方向等等。 绘制基本几何形体的步骤

6
3.4 简单形体几何建模 常用基本形体图库,选取三维实体建模工具图标 参数设置: 按照屏幕下方状态栏的提示,用鼠标确定起始绘图点
3.4 简单形体几何建模 常用基本形体图库,选取三维实体建模工具图标 参数设置: 产生新构件(New Part)、添加几何体到现有构件(Add to Part)、添加几何体到地基上(On Ground) 选择输入有关尺寸参数 按照屏幕下方状态栏的提示,用鼠标确定起始绘图点 定义了几何形体的位置,自动在起始点设置一个标记坐标 按住鼠标左键不放,拖动鼠标 释放鼠标键,完成简单形体建模
、添加几何体到现有构件(Add to Part)、添加几何体到地基上(On Ground) 选择输入有关尺寸参数. 按照屏幕下方状态栏的提示,用鼠标确定起始绘图点. 定义了几何形体的位置,自动在起始点设置一个标记坐标. 按住鼠标左键不放,拖动鼠标. 释放鼠标键,完成简单形体建模.")
7
简单形体几何建模 几何建 模工具 几何建模工具集 表格编辑器 组合形体 细节 浮动对话框 设置栏

8
ADAMS/View基本形体图库

9
ADAMS/View基本形体图库

10
3.5 复杂形体几何建模 连接线段 组合形体

11
复杂形体几何建模--添加几何体细节结构 边缘倒角、边缘圆角、开孔、添加凸台、挖空或在外围添加材料

12
3.6 修改几何形体 3种方法:拖动热点、利用对话框和编辑位置表 拖动热点 : 选择几何体, 拖动热点

13
修改几何形体---利用对话框 鼠标右键 → 弹出式菜单 → 几何体→ Modify命令

14
修改几何形体--编辑位置表 修改直线、多义线、拔出形体、回转体的形状 弹出式修改对话框中,选择More快捷键

15
3.7 修改构件特性----特性修改对话框 鼠标右键 → 弹出式菜单 → 构件→ Modify命令 设置材料 (右键) 设置惯性和惯性矩
注释 移动和旋转 设置初始速度 测量 设置初始位置

16
4 约束机构 4种类型的约束 运动副约束,例如:转动副,棱柱副等 指定约束方向 接触约束 约束运动 限制某个运动方向
4 约束机构 4种类型的约束 运动副约束,例如:转动副,棱柱副等 指定约束方向 限制某个运动方向 接触约束 定义两构件在运动中发生接触时,是怎样相互约束的 约束运动 规定一个构件遵循某个时间函数按指定的轨迹规律运动

17
4.2 约束工具 连接工具集 运动工具集

18
4.3 常用的运动副

19
常用的运动副

20
修改运动副 鼠标右键 → 弹出式菜单 →运动副 → Modify命令 设置基本参数 定义运动 设置初始条件

21
4.4 其它约束方式 指定约束 凸轮机构 定义机构的运动 4.5 约束机构的若干注意点

22
5. 施加载荷 4种类型的力: 定义力时需要说明: 作用力 柔性连接力 特殊力(例如:重力等) 接触力 力 或力矩 力作用的构件和作用点
力 或力矩 力作用的构件和作用点 力的大小和方向

23
5.1 定义力的大小和方向 直接输入数值 输入ADAMS/View提供的函数 输入子程序的传递参数 定义力方向:沿坐标标记、沿两点连线
力或力矩值 刚度系数K和阻尼系数C 柔性连接系数 输入ADAMS/View提供的函数 位移、速度和加速度函数-----力和运动之间的函数关系 力函数 正压力、摩擦力等 数学运算函数 样条函数 输入子程序的传递参数 允许用FORTRAN、C或C++语言编写子程序,描述力和力矩 定义力方向:沿坐标标记、沿两点连线

24
5.2 调用施加力工具 主工具箱 Build菜单 力作用在一对构件上(作用力和反作用力) 力作用在构件和地基之间(单作用力) 参 数 设 置
 力作用在构件和地基之间(单作用力) 参 数 设 置")
25
5.3 施加作用力和修改力 选择施加的力: 设置栏选择 修改力或力矩的定义 使用自定义函数或自定义子程序
Space fixed、Body fixed、或Two bodies 选择力方向的定义方法:Normal to Grid或Pick Feature, 输入力值(Constant),输入系数K和C(K and C),或自定义(Custom) 如果选择采用方向矢量定义力的方向,需定义方向矢量 使用自定义函数或自定义子程序定义力:显示修改力对话框 修改力或力矩的定义 使用自定义函数或自定义子程序
,输入系数K和C(K and C),或自定义(Custom) 如果选择采用方向矢量定义力的方向,需定义方向矢量. 使用自定义函数或自定义子程序定义力:显示修改力对话框. 修改力或力矩的定义. 使用自定义函数或自定义子程序.")
26
修改力或力矩

27
6. 编辑样机模型 6.1 选择对象: 6.2 使用表格编辑器编辑对象: 选择工具 ,鼠标拉对角线 弹出式菜单
选择工具 ,鼠标拉对角线 弹出式菜单 6.2 使用表格编辑器编辑对象: Tools菜单,选择Table Editor命令 操作命令 输入栏 列标题 行标题 对象类型选择

28
6.3 修改、复制、删除和重新命名对象 使用弹出式菜单 使用数据库浏览器 释放所有选择的对象
Edit 菜单 → 选择Modify\Copy\Delete\Remame命 选择需要编辑的对象

29
6.4 移动和旋转对象 通过拖动近似地移动对象 使用位置手柄移动和旋转对象 显示位置手柄 沿手柄轴拖动对象 绕手柄轴旋转对象 手柄位置

30
采用增量法移动和转动对象 移动工具集和对话框 绕x轴旋转 绕z轴旋转 绕y轴旋转 角度增量 沿x轴移动 沿y轴移动 设置支点 设置视 图方向
位移增量 移动工具集和对话框

Similar presentations


. 2 分享綱要 1 1 什麼是摘要 2 3 如何教摘要 實例與實際操作.>")

 防洪 (2) 湖北坪興建三峽主壩簡介 長江三峽水利樞紐工程 三峽工程的利益 (Part1) 三峽工程的利益 (Part2) 三峽工程的弊 (Part1) 三峽工程的弊 (Part2) 總結 組員名單 完.>")














