Download presentation
1
第2章 Z变换 Z变换的定义与收敛域 Z反变换 系统的稳定性和H(z) 系统函数
 系统函数")
2
z变换定义及收敛域 收敛域(ROC): R-< |z|<R+ 1)有限长序列
: R-< |z|<R+ 1)有限长序列")
3
2)右边序列
右边序列")
4
3)左边序列
左边序列")
5
4)双边序列
双边序列")
6
部分分式法求Z反变换 1) |z|>3 非稳定,因果 2) 2<|z|<3 非稳定, 非因果
 |z|>3 非稳定,因果 2) 2<|z|<3 非稳定, 非因果")
7
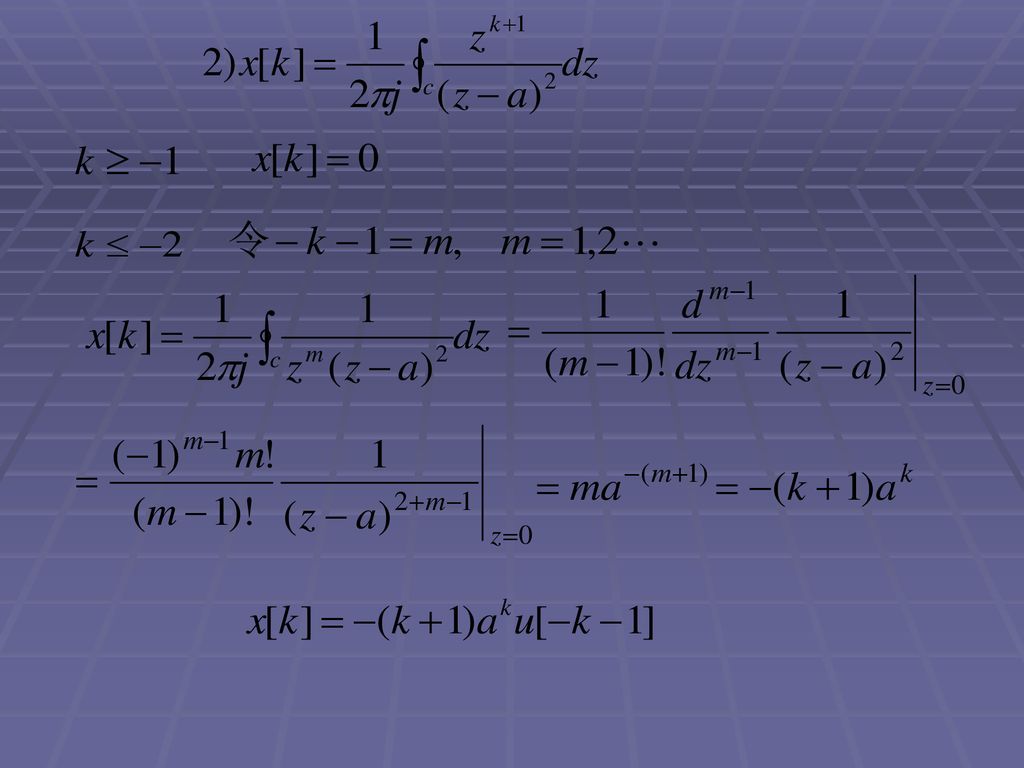
留数法求Z反变换 C为X(z) 的ROC中的一闭合曲线
 的ROC中的一闭合曲线")
8
求:1)ROC为|z|>|a|时的x[k]
![求:1)ROC为|z|>|a|时的x[k]](http://slidesplayer.com/slide/14162290/86/images/8/%E6%B1%82%EF%BC%9A1%29ROC%E4%B8%BA%7Cz%7C%3E%7Ca%7C%E6%97%B6%E7%9A%84x%5Bk%5D.jpg "求:1)ROC为|z|>|a|时的x[k]")
10
系统的稳定性和H(z) LTI系统稳定的充要条件: H(z)的收敛域包含单位圆 稳定因果系统 非稳定非因果系统
 LTI系统稳定的充要条件: H(z)的收敛域包含单位圆 稳定因果系统 非稳定非因果系统")
11
稳定非因果系统

12
系统函数 对LTI系统: y[k]=x [k]*h[k] 由z变换的性质:Y(z)=H(z)X(z) H(z)称为离散LTI系统的系统函数
当的H(z) ROC包含单位圆时 是h[k]实系数时,由H(ejW)的对称性质可得
![系统函数 对LTI系统: y[k]=x [k]*h[k] 由z变换的性质:Y(z)=H(z)X(z) H(z)称为离散LTI系统的系统函数](http://slidesplayer.com/slide/14162290/86/images/12/%E7%B3%BB%E7%BB%9F%E5%87%BD%E6%95%B0+%E5%AF%B9LTI%E7%B3%BB%E7%BB%9F%3A+y%5Bk%5D%3Dx+%5Bk%5D%2Ah%5Bk%5D+%E7%94%B1z%E5%8F%98%E6%8D%A2%E7%9A%84%E6%80%A7%E8%B4%A8%EF%BC%9AY%28z%29%3DH%28z%29X%28z%29+H%28z%29%E7%A7%B0%E4%B8%BA%E7%A6%BB%E6%95%A3LTI%E7%B3%BB%E7%BB%9F%E7%9A%84%E7%B3%BB%E7%BB%9F%E5%87%BD%E6%95%B0.jpg "当的H(z) ROC包含单位圆时. 是h[k]实系数时,由H(ejW)的对称性质可得.")
13
差分方程和系统函数 N=0, a00 时,系统称FIR(finite impulse response)
N>0,{ak ;k=1,2...N}中至少有一项非零时,系统被称 为IIR(infinite impulse response)系统
系统.")
14
系统函数H(z)的表示方式 a) z-1的有理函数表示 b) z的有理函数表示
的表示方式 a) z-1的有理函数表示 b) z的有理函数表示")
15
c)零点、极点和增益常数表示 d) 2阶因子表示
零点、极点和增益常数表示 d) 2阶因子表示")


 的基解矩阵的求法.>")


 中央投資公司總經理 1.>")

是指企业获取利润的能力。 评价方法: ①利润与销售收入之间的比率 ②利润与资产之间的比率.>")

声音的产生:声音是由于物体的振动产生的。 凡是发声的物体都在振动。振动停止,发声也停止。 ( 2 )声源:正在发声的物体叫声源。固体、液体、气体 都可以作为声源,有声音一定有声源。 ( 3 )声音的传播:声音的传播必须有介质,声音可以在.>")





![第十章 肌肉活动的神经控制 第一节 神经系统概述 第二节 运动的神经控制 [复习思考题] 神经组织 神经传导的一般特征 神经元间的信息传递](/61/11330112/big_thumb.jpg "第十章 肌肉活动的神经控制 第一节 神经系统概述 第二节 运动的神经控制 [复习思考题] 神经组织 神经传导的一般特征 神经元间的信息传递>")
由低到高发出不同频率的声音, 请同学们闭上眼睛仔细听,当刚听到时就 老师用一台音频发声器(发出不同频率声 音的设备)由低到高发出不同频率的声音, 请同学们闭上眼睛仔细听,当刚听到时就.>")
>")


