Download presentation
1
全球定位系統(GPS)原理
原理")
2
授課內容(1) GPS簡介 架構 時間系統 坐標系統 GPS定位原理 GPS定位基本概念 GPS觀測量
 GPS簡介 架構 時間系統 坐標系統 GPS定位原理 GPS定位基本概念 GPS觀測量")
3
授課內容(2) GPS定位測量方法 GPS單點定位 DGPS差分定位(Differential GPS, DGPS) 靜態相對定位
一次差(single difference) 二次差(double difference) 三次差(triple difference) 動態相對定位(Real Time Kinematic, RTK)
 二次差(double difference) 三次差(triple difference) 動態相對定位(Real Time Kinematic, RTK)")
4
授課內容(3) GPS誤差 衛星軌道誤差 衛星與接收儀時鐘誤差 多路徑效應誤差 天線相位中心誤差 電離層誤差 對流層誤差
 GPS誤差 衛星軌道誤差 衛星與接收儀時鐘誤差 多路徑效應誤差 天線相位中心誤差 電離層誤差 對流層誤差")
5
GPS建立之目的 衛星定位技術是利用人造衛星進行點位測量的一種現代化高科技定位方法。 GPS全球衛星定位系統佈建最初是以軍事應用為目的:
核子潛艇在海洋中的定位 長程飛彈的導航及定位 一般軍用車輛、船艦、火砲的定位應用 民間定位導航、車輛防盜、運輸車隊管理、路徑追蹤、急難救助及生態環境監視等。

6
GPS之特質 全天候24小時 全球性、快速定位 不需要點位間的通視 提供經度、緯度、高度(3D)和時間 15公尺導航精度 公分級測量精度
10-6 second授時精度

7
GPS之架構 全球定位系統全名為NAVSTAR/GPS, NAVigation Satellite Timing And Ranging/Global Positioning System;簡稱為GPS。顧名思義,這系統一開始就是為了導航、定時及測距的功能而開發的。 GPS於西元1973年開始由美國國防部建構新一代衛星導航定位系統。自1978年發射第1顆測試衛星(Block-I),1989年發射第1顆正式衛星(Block-II),至1993年發射第24顆衛星後開始達到初期規劃的操作功能。
,1989年發射第1顆正式衛星(Block-II),至1993年發射第24顆衛星後開始達到初期規劃的操作功能。")
8
第二代 GPS 衛星 第二代GPS衛星Block-II和Block-IIA,設計壽命7.5年;另有Block-IIR,設計壽命10年。

9
GPS之架構 GPS衛星均勻分佈在6個近圓形的軌道面上,每個軌道上至少有4顆衛星。目前總共由30顆衛星 (多出的衛星數目為測試或備用衛星),其高度約為20200 km。 在衛星軌道設計上,主要是使地表上任一地點之空曠處,皆能同時接收到4顆以上的衛星訊號,且各軌道面相隔60度,每個軌道與赤道面傾斜角為55度,約以每秒3公里的速度飛行,而衛星繞行地球一週之時間約為11時58分。

10
GPS之架構

11
Copernicus: Heliocentrics 哥白尼的 日心說(1543) Galileo: Dialog 伽利略的 兩世界之對話 Nicolaus Copernicus (1473 – 1543) Galileo Galilei (1564 – 1642)
 Galileo Galilei. (1564 – 1642)")
13
Johannes Kepler (1571 – 1630) : Planet motions 行星運動規律 (1609)
Isaac Newton (1642 – 1727) : Gravitation & Eq. of Motion 萬有引力與運動方程 (1687)
 : Gravitation & Eq. of Motion. 萬有引力與運動方程 (1687)")
14
GPS之架構 GPS整個系統的組成可分為太空衛星部分、地面控制部分與使用者部分。 太空衛星部份:如前所述。
地面控制部份:目前全球有五個地面衛星監控站,位於夏威夷、亞森欣島、迪亞哥加西亞、瓦加林島、科羅拉多。 使用者部分:泛指各式各樣用途的接收儀。

15
地面控制站

16
地面控制站 地面天線:可接收衛星傳送的定位信號,及發送對衛星位置、角度的控制信號。地面天線是等距離分布在地球表面。
監控站:監控站檢查衛星傳送回來的高度、位置、速度等資料,並對每一個衛星的運行狀況作檢查。 主控制中心:位於美國科羅拉多的許雷瓦空軍基地,管理所有的定位衛星、遙控監控站、地面天線。並收集整理由各監控站傳送回的每一個定位衛星的資料,計算其位置及原子時鐘的誤差,再將星曆常數及時錶偏差的修正量藉由各地面天線,傳回到相對應的衛星。

17
使用者部份 由接收訊號中的時間資訊以及衛星本身的時鐘相比較,以計算訊號由衛星發射至接收儀收到訊號時的時間差,然後計算其間距離(需要經過時間同步的處理)。 硬體部分:主要是指接收儀、天線和電源等硬體設備。 軟體部分:支持接收儀硬體實現其功能,並計算完成各種導航與定位任務的重要條件。一般來說,軟體部分包含接收儀內部軟體及觀測數據後處理軟體。

18
GPS接收儀類別 依據接收的衛星信號頻率,可分為: 依據接收儀的用途,可分為: 單頻接收儀(L1) 雙頻接收儀(L1+ L2) 大地測量型
導航型

19
GPS大地測量型接收儀

20
GPS導航型接收儀

21
GPS訊號傳遞流程 23o ’ N 122o ’ W

22
GPS時間系統 由於GPS定位的最基本觀念是利用GPS訊號的速度乘上傳播的時間得到距離,再利用衛星坐標及衛星到接收儀的距離求出接收儀的坐標。
由於定義地球坐標框架的時間系統、衛星繞行時間系統以及平常生活的時間系統各有其標準和定義。 因此為了GPS精確導航,必須建立其專用的時間系統,而此系統又必須和前述各時間系統有一精準的轉換,以利使用者定位之用。

23
衛星和接收儀的時間基準不一致 衛星坐標已知

24
時間系統 世界時:基於地球自轉現象導得的世界時系統。 恆星時 太陽時 協調世界時 原子時:以原子震盪的次數而定義的時間系統。 動力時

25
時間系統—恆星時 恆星時 以春分點為參考點,由春分點的週日視運動所確定的時間,稱為恆星時。
因為恆星時是以春分點相對本地子午圈時為原點計算,同一瞬間對不同測站的恆星時各異,所以恆星時具有地方性,亦稱為「地方恆星時」。 由於歲差及章動的影響,有真春分點和平春分點之分。真春分點的時角稱為“地方視恆星時(LAST)”;平春分點的時角稱為“地方平恆星時(LMST)”。 格林威治之恆星時,則分別以“格林威治視恆星時(GAST) ”和“格林威治平恆星時(GMST) ”表示。
 ;平春分點的時角稱為 地方平恆星時(LMST) 。 格林威治之恆星時,則分別以 格林威治視恆星時(GAST) 和 格林威治平恆星時(GMST) 表示。")
26
時間系統—太陽時 太陽時 真太陽日為真太陽連續二次經過同一子午圈下中天之時間間隔。
平太陽日為平太陽於同一子午圈上連續二次經過下中天的時間間隔。 太陽時也具地方性,常稱為“地方太陽時”或“地方時”。 以平子夜為零時起算的格林威治平太陽時(GMT)稱為世界時(UT)。
稱為世界時(UT)。")
27
時間系統—協調世界時 協調世界時 由於以地球自轉為基礎的世界時需求仍廣,但是受地球自轉速度長期變慢趨勢影響,近年來世界時每年比原子時約慢1秒,二者之差逐年累加。 為了避免原子時與世界時之間產生過大的偏差,從1972年開始採用了一種以原子時秒長為基礎,在時刻上儘量接近於UT1世界時的折衷時間系統,稱為協調世界時(UTC)。 UTC:即手錶的時間,以與 UT1不相差0.9秒為準,大於0.9秒則於6月30日或12月31日最後一秒加一閏秒。
。 UTC:即手錶的時間,以與 UT1不相差0.9秒為準,大於0.9秒則於6月30日或12月31日最後一秒加一閏秒。")
28
時間系統—原子時 原子時 為了精確描述衛星的運動,需要均勻的時間觀測量做為衛星運動方程的獨立變數,適用的時間系統為由地球繞太陽軌道運動所導得的動力時。 動力時(TDT):天體的星曆是根據天體動力學建立的運動方程而編算的,動力時的特點是抽象,且具有統一時間尺度。 GPS時(GPST):GPS Time,再由一組GPS系統專用的原子鐘所定義之原子時。 國際原子時(IAT):由世界各原子時加權平均而得。
:GPS Time,再由一組GPS系統專用的原子鐘所定義之原子時。 國際原子時(IAT):由世界各原子時加權平均而得。")
29
GPS時間系統 衛星信號傳送的速度與光速相同,所以無法以普通時鐘為測量工具,因為時鐘的誤差即使只有千分之一秒,對GPS定位距離就會造成約300公里的誤差。 每一個GPS衛星攜帶有兩個銫原子鐘和兩個銣原子鐘,銫原子鐘的震盪頻率為9,192,631,770 Hz,銣原子鐘的震盪頻率約6 GHz 。 目前國際上一秒的定義是『銫-133原子在地球上兩個固定位階之間震盪9,192,631,770次所經過的時間』,它的準確度約每140萬年差1秒,是人類歷史上最準確的計時器。

30
原子鐘 因為GPS衛星載有與控制中心完全相同的原子鐘,這個時間信號隨同定位信號傳送至地球,時間的同步保證了距離測量的準確性。
在地球接收端對此時間信號的另一個應用,就是可將其作為標準時鐘使用。

31
時間系統之轉換 時間系統之轉換 IAT=GPST+19s IAT=TDT-32s.184 IAT=UTC+n×1s (閏秒)
")
32
各時間系統的轉換 衛星軌道: 地球動力時 GPS Time 起算時刻:1980年1月6日UTC 0時

33
儒略日 儒略日 (Julian days):JD 儒略世紀為36525平太陽日。
儒略日為廣為應用的參考時刻,其日數自西元前4713年1月1日中午起算,單位為平太陽日 (mean solar days)。 儒略世紀為36525平太陽日。
。 儒略世紀為36525平太陽日。")
34
儒略日 Modified Julian Days GPS weeks (GPS週數) MJD=JD-2400000.5
GPS週數自GPS之標準時刻算(JD= ),故 GPS week=INT[ (JD )/7 ] 例如在J2000.0時刻,其GPS週數為1042 取整數部分
,故 GPS week=INT[ (JD )/7 ] 例如在J2000.0時刻,其GPS週數為1042. 取整數部分.")
35
GPS坐標系統 任何物理學的研究,都必須將研究對象置於一個坐標系中,才能進行定量化的研究。
研究地球形狀,先要將地球表面空間予以數字化,因此必須先建立可以描述不規則的地形起伏的坐標系。 要建立坐標系描述不規則的地形起伏,必須先確定一個規則的參考面,作為計算基準面。 基準面的選擇可為水準面、橢球面、球面或平面。

36
地球形狀 真實地球表面的形狀是很不規則的,而此種不規則性與人類的活動密切相關。

37
為何我們需要一個橢球體? 歐洲遙測衛星ERS-1自780 km高拍攝的地球形狀。
此影像是去除掉水體和雲之後的地球形狀,像是乾掉的蕃茄,而不是表面光滑的形體。 要在這個不規則的表面上計算點位的位置是非常複雜且困難的。 因此我們需要一個簡單的數學模型來表示地球形狀,這個簡單的數學模型就是橢球體。

38
旋轉橢球體 橢球體大小之定義參數(地球原子) b a 長半徑a(描述橢球體大小) 短半徑b(描述橢球體大小)
扁率f=(a-b)/a(描述橢球體形狀) 離心率e= (a2-b2)/a2(描述橢球體形狀) a b
/a(描述橢球體形狀) 離心率e= (a2-b2)/a2(描述橢球體形狀) a. b.")
39
旋轉橢球體的種類

40
旋轉橢球體的選擇 各個國家依其國土位置及形狀選擇不同的橢球體(形狀基準),也各自建立其國家的區域性坐標系(位置基準和高程基準),甚至同一個國家在不同年代也會有不同的坐標系。 各個國家建立他們自己的區域性平面基準的結果:不一致的基準。 不同的基準之間可以透過基準轉換計算,求得轉換參數,建立兩基準之間的轉換關係。

41
旋轉橢球體的選擇 橢球體的選擇必需與該國家的領土範圍最密合 北美基準 歐洲基準 地形 N O1 O2 Europe N. America
S. America Africa N 地形 歐洲基準 北美基準 橢球體的選擇必需與該國家的領土範圍最密合

42
未來的平面基準 目前全球已有超過二百個區域性基準,其所選用的橢球體(形狀基準)皆不一定相同。
在引用不同的基準之下,同一個點所計算的平面位置將會產生偏移量。 基準若引用錯誤將會導致嚴重的後果。 在全球利益的考量下,我們希望能用一個足夠精度標準的全球性共用的平面基準來取代各國的區域性基準。

43
不同平面基準之間的偏移量

44
不同基準造成的問題 正確位置 基準平移改正 GPS 位置 未作基準平移改正

45
世界大地坐標系統 (World Geodetic System 1984, WGS-84)
GPS所採用的WGS-84已可以提供全球相同精度的經緯度值,並且也已精確地推算出地心的位置,是目前與地球形狀最密合的橢球體。 將WGS-84當作全球性的統一平面基準。 即使是海中孤島或從未建立控制網的地區,也能很容易的解決定位問題。 台灣能於921地震後快速重建測量控制點,便是拜GPS之賜。

46
最密合橢球體 建立全球性的基準必需是精確的測定地心位置,而且是與真實地球形狀最密合。 N Topography Europe
N. America S. America Africa N Topography

47
坐標系的概念 GPS衛星定位是透過測站的接收儀,接收來自衛星的訊號測定測站的位置。 GPS衛星卻總是圍繞地球質心旋轉,且與地球自轉無關。
測站是固定在地球表面,其空間位置隨地球的自轉而運動。

48
坐標系的概念 需要研究建立下列坐標系問題:
衛星在其軌道上運動的坐標系(天球坐標系) 測站所在地的坐標系(地球坐標系) 兩坐標系之間的轉換關係 不論何種坐標系,一般都取地球質心為坐標系原點,再根據坐標軸指向定義的不同,分成天球坐標系和地球坐標系兩類。
 測站所在地的坐標系(地球坐標系) 兩坐標系之間的轉換關係. 不論何種坐標系,一般都取地球質心為坐標系原點,再根據坐標軸指向定義的不同,分成天球坐標系和地球坐標系兩類。")
49
天球坐標系 因天球坐標系與地球自轉無關,所以對天體和衛星的位置及其運動狀態可以很方便地描述。 空間直角坐標系:(x, y, z)
原點:地球質心 Z軸:指向北天極PN X軸:指向春分點 Y軸:與X、Z軸形成右旋直角坐標系

50
天球坐標系 衛星軌道 春分點 地心 O 衛星 X Y Z R x y z

51
歲差 上述之天球坐標系是基於假設地球為均質的球體,且沒有其他天體引力影響的理想情況。
實際上地球形體是赤道隆起的橢球體,在日月引力和其他天體對隆起部分的作用下,地球自轉軸方向不再保持不變,致使春分點在黃道上產生緩慢向西移動的現象,稱為歲差。 在歲差的影響下,使得地球自轉軸繞黃北極做緩慢順時針旋轉(從北天極上方觀看)。 每年西移約50.71,週期大約為25800年。
。 每年西移約50.71,週期大約為25800年。")
52
章動 實際上,在太陽和其他星體引力的影響下,月球的運行軌道和月、地之間的距離都是不斷變化著。
在日、月引力等因素影響下,真北天極將繞平北天極旋轉形成橢圓形軌跡,此現象稱為章動。 章動橢圓的長半徑為9.2,週期為18.6年(此即海洋潮汐週期)。
。")
53
歲差與章動 北天極在球上的複雜運動可以分解成兩種規律的運動: 歲差+章動 平北天極繞黃北極的順時針旋轉運動,即上述之歲差現象。
PN N PN 18.6年 歲差 歲差+章動 章動橢圓 歲差與章動疊加 北天極在球上的複雜運動可以分解成兩種規律的運動: 平北天極繞黃北極的順時針旋轉運動,即上述之歲差現象。 真北天極繞平北天極的順時針旋轉運動,即上述之章動現象。

54
協議天球坐標系 因歲差和章動的影響,瞬時天球坐標系的坐標軸指向隨時在改變,並不是慣性坐標系,無法根據牛頓運動定律來研究衛星的運動規律。
選擇某一個時刻為準,將此時刻的瞬時地球自轉軸(指向北極)和地心至瞬時春分點的方向作歲差與章動的改正,改正後的方向分別作為Z軸和X軸的指向。由此構成的空間固定平天球坐標系稱為協議天球坐標系或稱為協議慣性坐標系(Conventional Inertial System, CIS)。
和地心至瞬時春分點的方向作歲差與章動的改正,改正後的方向分別作為Z軸和X軸的指向。由此構成的空間固定平天球坐標系稱為協議天球坐標系或稱為協議慣性坐標系(Conventional Inertial System, CIS)。")
55
協議天球坐標系 實用上是將衛星在協議坐標系中的坐標值轉換成實際觀測時刻的瞬時天球坐標系的坐標值,以取得衛星和測站相關位置在時間系統上的一致。
坐標轉換分成兩個步驟: 歲差轉換 章動轉換

56
地球坐標系 地球坐標系與地球一起轉動,因此與地球自轉相關,故可方便地描述測站的位置。 空間直角坐標系:(x, y, z) 原點:地球質心
Z軸:指向地球北極 X軸:指向格林威治子午圈與赤道面的交點 Y軸:與X、Z軸形成右旋直角坐標系

57
地球坐標系 X Y Z λ Φ h x y z 橢球面 法線 G P Gr. O

58
協議地球坐標系 地球自轉軸受到地球內部質量分佈不均勻的影響,使其相對於地球體的位置並不固定,導致地極點的位置隨時間而變化,此現象成為地極移動,簡稱極移。 國際上取長時間所觀測瞬時北極的平均位置作為自轉軸位置(即今日一般測量所稱的北方),稱為國際協議地極。
,稱為國際協議地極。")
59
協議地球坐標系 以協議地極為Z軸的地球坐標系,稱為協議地球坐標系(Conventional Terrestrial System, CTS)。 GPS衛星定位測量中,通常在協議天球坐標系中研究衛星運動軌道,而在協議地球坐標系中研究地面點的坐標。 因此需要進行兩坐標系的轉換計算。

60
協議天球與地球坐標系之轉換 協 議 天 球 坐 標 系 地 歲 差 和 章 動 旋 轉 真 春 分 點 時 角 極 移

61
WGS-84坐標系 GPS衛星定位系統所採用的是WGS-84坐標系,屬於協議地球坐標系。 WGS-84坐標系定義如下: 原點:橢球體質心
Z軸:指向國際時間局(BIH)1984.0年定義之協議地球北極(CTP)方向 X軸:指向BIH1984.0年零子午圈和CTP赤道的交點 Y軸:與Z軸和X軸構成右旋空間直角坐標系
1984.0年定義之協議地球北極(CTP)方向. X軸:指向BIH1984.0年零子午圈和CTP赤道的交點. Y軸:與Z軸和X軸構成右旋空間直角坐標系.")
62
WGS-84坐標系 國際地球自轉服務組織(IERS)以WGS-84橢球體為參考橢球體,利用VLBI、SLR、GPS等方法建立了一個國際地球參考框架(ITRF),供各界參用。 ITRF是利用分佈全球的空間大地測量觀測站的坐標和運動速度來定義的,實質上屬於地球坐標系。
以WGS-84橢球體為參考橢球體,利用VLBI、SLR、GPS等方法建立了一個國際地球參考框架(ITRF),供各界參用。 ITRF是利用分佈全球的空間大地測量觀測站的坐標和運動速度來定義的,實質上屬於地球坐標系。")
63
Very Long Baseline Interferometer

64
Satellite Laser Ranging

65
Distance D = Speed of Light x Time
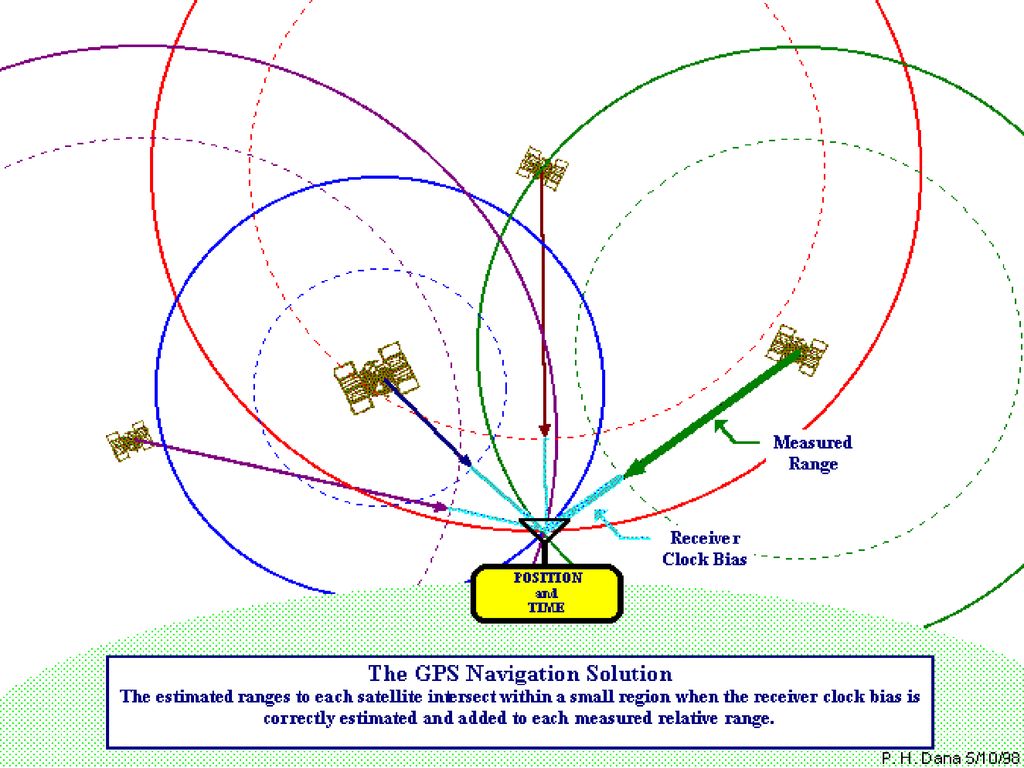
GPS定位原理 D Let’s regress for a moment and imagine that we wanted to get coordinates for this point by trilateration. We would have to set up an EDM from 3 known control points and measure distances to the survey point.<B> Three distances are needed because there are three coordinate components or unknowns, X,Y, and Z. What if we replaced the prism with a GPS antenna and the EDMs with GPS SVs?<B> As you can see GPS works in the same way as trilateration. All we need to know are the coordinates of the SVs and what the distance is to each satellite. As we have shown before, the Control Segment constantly tracks each SV and makes that information available to the User Segment. Therefore, we know the coordinates of the SVs. Now all we need to know is the distance, D, to the SV<B> The distance the GPS signal travels vary only by the amount of time the signal travels since the speed of light is constant. So now we need to know travel time from SV to receiver. The SVs and the receivers all produce the same code at the same time. The trick is to synchronize the clocks of the receiver and the SVs. The SVs have very precise time since they have four atomic clocks on board. They all keep time very accurately. Any errors in their clock are known by the Control Segment and that info is transmitted to the User Segment. So the only error is in the receiver clock. This 4th unknown can be determined by distancing a 4th SV. Therefore 4 SVs are needed to use GPS. <B> Distance D = Speed of Light x Time

66
GPS定位原理 坐標已知 坐標已知 坐標已知 觀測值 坐標已知 觀測值 觀測值 觀測值 未知數

67
GPS定位原理 GPS定位的基本觀念是利用空中已知衛星的坐標和觀測到接收儀與衛星間之距離來求得接收儀的位置。

68
二度空間定位 GPS接收器可量測衛星訊號由衛星出發直到到達接收器所需的時間,此時間再乘上光速後即成為距離量。由於此一距離含有接收器的時錶誤差,故又稱為虛擬距離觀測量。

69
三度空間定位 由於我們從衛星星曆當中得知各衛星的距離,可以第一顆衛星作為圓心,其虛擬距離量為半徑畫一個球,此時衛星接收器的位置應在此球的表面之上。若再將第二顆衛星考慮進去,兩球的交集是一個圓。

70
三度空間定位 接收器位置(3)與時錶誤差(1),共有4個未知數,故共需要 4 顆衛星來進行導航定位。
將最後的第4顆衛星加入之後,4個球之交集是一點,也就是接收器的位置,同時也解出了接收器時錶誤差。

71
GPS觀測量 每顆GPS衛星上均配有頻率穩定的原子鐘,利用頻率10.23 MHz為基頻,分別乘上154及120倍,可得到L1與L2兩種頻率的載波。 在載波上調製電碼,兩種頻率的電碼分別為基本頻率除以10及基本頻率本身,即C電碼之頻率為1.023 MHz,P電碼之頻率為10.23 MHz。 L1載波可調制C1電碼與P1電碼。 L2載波僅調制P2電碼。 共五種觀測資料:L1、L2、C1、P1、P2。

72
GPS訊號生成原理

73
在載波上調制電碼之目的 藉由量測電碼的時間差,獲得衛星與接收器間的距離。 辨識各類衛星。 管制使用對象(P碼必要時可加密)。
消除誤差:接收器可檢查C/A碼與P碼的頻率變化,來修正電離層引起的非幾何性誤差。

74
GPS觀測量 電碼觀測量 一般稱為Pseudo-Range,單位為公尺,可利用電碼中所傳遞的廣播星曆立刻計算接收儀坐標,但精度較差。 載波觀測量 一般稱為Carrier-Phase,接收儀鎖住載波後所開始計算的週波數,無單位,一般都需要進行後處理計算,精度高。

75
電碼觀測量

76
電碼觀測量 C1(C/A code on L1)為精度較差的虛擬距離觀測量(平均誤差為15公尺),主要是供民間使用者導航定位使用。
P1、P2(Precise code on L1 and L2)為精度較佳之虛擬距離觀測量(平均誤差為3公尺),是供美國軍方作為精確導航使用。
為精度較佳之虛擬距離觀測量(平均誤差為3公尺),是供美國軍方作為精確導航使用。")
77
測距原理 每顆衛星每0.1 msec傳送一組唯一訊號 將接收器內部產生的電碼訊號與接收到的衛星電碼訊號兩者做比較
當兩個訊號達到最大相關時,將得到一訊號傳播的時間延遲,再乘上電磁波在真空中的速度,即可求得接收儀到衛星之間的距離 接收器的時鐘必須與衛星時鐘同步

78
虛擬距離量測示意圖 衛星時鐘誤差 使用者 大氣層傳播誤差 接收儀時鐘誤差 衛星 真距離 虛擬距離

79
虛擬距離觀測量方程式 P1 = +c(dt-dT)+dtrop+dion1+εP1
式中 Pi :量測得之虛擬距離(公尺) :衛星到接收儀之間的真實距離(公尺) c :真空中之光速(公尺/秒) dt :接收儀時鐘誤差(秒) dT :衛星時鐘誤差(秒) dtrop :對流層延遲誤差(公尺) dioni :電離層延遲誤差(公尺) εPi :虛擬距離觀測量之雜訊及多路徑效應(公尺)
 :衛星到接收儀之間的真實距離(公尺) c :真空中之光速(公尺/秒) dt :接收儀時鐘誤差(秒) dT :衛星時鐘誤差(秒) dtrop :對流層延遲誤差(公尺) dioni :電離層延遲誤差(公尺) εPi :虛擬距離觀測量之雜訊及多路徑效應(公尺)")
80
載波觀測量

81
載波觀測量 L1與L2載波觀測量之波長分別為19 cm與24 cm,其觀測誤差在1 mm左右
將接收器內部產生的相位訊號與接收到的衛星相位訊號兩者做比較 與虛擬距離不同的是,載波觀測量內含一未知的週波未定值,在接收器一開機時,其週波的總數並不知道

82
週波未定值(Ambiguity) Dl = 小數波 N = 整數波 Dl N D Distance D = Nl + Dl
 Dl = 小數波 N = 整數波 Dl N D Distance D = Nl + Dl")
83
載波觀測量 GPS接收儀在剛開始接收訊號時僅量得小數部份的載波相位差,即小數週波值
而存在衛星與接收儀之間的正確整數週波值並不知道,此整數週波值稱為週波未定值 每一個衛星都具有一個週波未定值,且必定是一個整數,亦稱作整數週波未定值(N) 只要接收器持續開啟追蹤衛星,其距離的變化量可以被觀察(週波未定數保持不變)
 只要接收器持續開啟追蹤衛星,其距離的變化量可以被觀察(週波未定數保持不變)")
84
求解整數週波未定值(N) 1 相位觀測(小數週波值ψ): (例如: 小數週波值ψ(t)=1/4) = 小數週波值ψ(t) 波長
= 1/4 0.190m = m 2 週波未定值(N0): = 完整載波個數 波長 = 106,000,000 0.190m = 20,140,000m 3 計數整數週波值(ΔN): = 計數 波長 = 1,000 0.190m = 190m 測站至衛星之距離: = 1+2+3 = ,140, = 20,140, m
: = 完整載波個數 波長. = 106,000,000 0.190m. = 20,140,000m. 3 計數整數週波值(ΔN): = 計數 波長. = 1,000 0.190m = 190m. 測站至衛星之距離: = = ,140, = 20,140, m.")
85
載波相位觀測量方程式 L1 = +c (dt-dT)+dtrop-dion1+λ1 N1 +εL1
式中 Li :接收儀接收到的相位觀測量(公尺) :衛星至接收儀間之真實距離(公尺) c :真空中之光速(公尺/秒) dt :接收儀時鐘誤差(秒) dT :衛星時鐘誤差(秒) dtrop :對流層延遲誤差(公尺) dioni :電離層延遲誤差(公尺) λi :載波之波長(公尺) N1,N2 :L1及L2之相位未定值(cycles) εLi : Li載波相位觀測量之雜訊及多路徑效應(公尺)
 :衛星至接收儀間之真實距離(公尺) c :真空中之光速(公尺/秒) dt :接收儀時鐘誤差(秒) dT :衛星時鐘誤差(秒) dtrop :對流層延遲誤差(公尺) dioni :電離層延遲誤差(公尺) λi :載波之波長(公尺) N1,N2 :L1及L2之相位未定值(cycles) εLi : Li載波相位觀測量之雜訊及多路徑效應(公尺)")
86
GPS衛星訊號基本資料表

87
未來GPS之新訊號 Second Civil Signal (L2C) Third Civil Signal (L5)
:7 SVs 至2016:24 SVs Third Civil Signal (L5) Fourth Civil Signal (L1C)
 Fourth Civil Signal (L1C)")
88
GPS觀測資料格式 共通格式:RINEX 2.1 Rinex 2.1 Trimble Topcon Ashtech Leica AOA
O-file:觀測資料檔 N-file:廣播星曆檔 Rinex 2.1 Trimble Topcon Ashtech Leica AOA

89
O-file:觀測資料檔

90
N-file:廣播星曆檔

91
雙頻載波相位觀測量之線性組合 無電離層線性組合L3 (Ionosphere Free):消除電離層效應。
無幾何間距線性組合L4 (Geometry-Free):消除幾何距及對流層效應。 寬巷線性組合L5 (Wide-lane):形成一波長比L1、L2更長且具有整數之相位未定值組合波。 窄巷線性組合L6 (Narrow-lane):形成一波長比L1、L2更短且為整數之相位未定值。
:消除幾何距及對流層效應。 寬巷線性組合L5 (Wide-lane):形成一波長比L1、L2更長且具有整數之相位未定值組合波。 窄巷線性組合L6 (Narrow-lane):形成一波長比L1、L2更短且為整數之相位未定值。")
92
雙頻載波相位觀測量之線性組合 頻率 優點 缺點 完全消除電離層延遲效應 雜訊放大為3倍 部分消除電流層延遲效應 無法消除大部分的誤差
無電離層線性組合 (Ionosphere Free)L3 完全消除電離層延遲效應 雜訊放大為3倍 無幾何距線性組合 (Geometry Free) L4 部分消除電流層延遲效應 無法消除大部分的誤差 寬巷線性組合 (Wide Lane) L5 更快速的搜尋整數週波未定值 雜訊放大為5.7倍 窄巷線性組合 (Narrow Lane) L6 更精確的搜尋整數週波未定值 計算較為費時
L3. 完全消除電離層延遲效應. 雜訊放大為3倍. 無幾何距線性組合. (Geometry Free) L4. 部分消除電流層延遲效應. 無法消除大部分的誤差. 寬巷線性組合. (Wide Lane) L5. 更快速的搜尋整數週波未定值. 雜訊放大為5.7倍. 窄巷線性組合. (Narrow Lane) L6. 更精確的搜尋整數週波未定值. 計算較為費時.")
93
授課內容(2) GPS定位測量方法 GPS單點定位 DGPS差分定位(Differential GPS, DGPS)
動態相對定位(Real Time Kinematic, RTK) 靜態相對定位 一次差(single difference) 二次差(double difference) 三次差(triple difference)
 靜態相對定位. 一次差(single difference) 二次差(double difference) 三次差(triple difference)")
94
GPS單點定位 利用虛擬距離觀測量進行最基本的定位,同時可以得到接收儀的位置及時鐘誤差。
一般利用電碼定位的好處是具有即時的特性,且無須太複雜的數學後處理。 市面上使用的汽車定位系統及手持式接收儀,即是使用電碼定位。 又稱為絕對定位,是直接確定測站相對於坐標原點(地球質心)絕對坐標的一種定位方法。
絕對坐標的一種定位方法。")
95
GPS單點定位 GPS可視為單程的測距,衛星時鐘與接收儀時鐘無法保持嚴格同步,將會使此段距離包含誤差,一般稱之為虛擬距離。
因此單點定位實際上至少必須觀測四顆以上的衛星,且僅能對時鐘誤差部份加以改正,但尚有其他誤差無法消除,以致精度較差。

97
GPS單點定位 GPS單點定位的基礎,即為空間距離的後方交會,定位精度約15公尺。
接收器位置(3)與時錶誤差(1),共有4個未知數,故必須觀測 4 顆以上的衛星來進行定位。
與時錶誤差(1),共有4個未知數,故必須觀測 4 顆以上的衛星來進行定位。")
98
DGPS差分定位 由於GPS衛星距離地面的高度有兩萬多公里,地面參考站與移動站之間的距離,與衛星至地面的距離相比算是很小,因此可以假設衛星訊號同時到達地面的任何位置。 DGPS通常指利用已知坐標的GPS基站,藉由無線電、廣播電台、GSM、通訊衛星,送出某時刻該基站單點定位時的坐標和其已知坐標的修正量,使得在基站附近進行單點定位的接收儀獲得修正數據,以改善單點定位精度。

99
DGPS差分定位 當相距不太遠的兩個測站同時分別進行單點定位時,環境誤差對兩站的影響大體上相同。
再利用無線通訊設備將此誤差改正值即時傳送給用戶,改正值與用戶所接收之觀測量合併一起計算,則可求得較高精度之定位坐標。

100
DGPS差分定位

101
DGPS差分定位 必須有一個經緯度坐標經過精確測量的固定地點,另有一個GPS接收器,在這個參考點接收GPS的信號。
在參考站接收的定位資料,包含了因對流層、電離層、太陽輻射等引起的誤差值。 包含誤差的接收資料與參考點記錄的準確經緯度資料作比對,可以算出定位誤差的改正值。此數值反向轉換成為各衛星的虛擬距離改正量,作為位置的修正資料。 修正資料再傳送至移動站,提供給接收儀進行修正,定位精度可達1~3公尺。

102
DGPS差分定位改正方式 根據所採用的差分改正方式的不同,差分GPS又可分為坐標差分和距離差分兩種形式。 坐標差分 距離差分 S2 S3
1o S1 V1 1c S1 S2 2o V2 2c S2 3o V3 3c S3 S3 4c S4 4o S4 V4 坐標差分 距離差分

103
DGPS差分定位數據處理 DGPS整個系統依進行數據處理的時間不同,可分為即時性或後處理方法。 即時性 後處理
在當時即需要取得坐標位置或速度等所需資料,如導航定位。 後處理 不需要立即獲得定位結果,可將資料蒐集後帶回辦公室處理、分析後得到結果。

104
單基站DGPS差分定位 僅依據一個基站所提供的差分改正值來進行改正的DGPS系統,稱為單基站DGPS差分定位。

105
單基站DGPS差分定位(RDS)
")
106
單基站DGPS差分定位(RDS)
")
107
多基站區域DGPS差分定位 在某一區域中佈置一個DGPS網,該網由若干個DGPS基站組成,通常還包含一個或數個監控站。

108
廣域DGPS差分定位 各基站並不單獨將所求得的虛擬距離改正值傳送給用戶,而是將改正值傳送至廣域DGPS網的數據處理中心統一計算。

109
動態相對定位 即時動態定位(Real Time Kinematic, RTK)與前述所提之DGPS原理相同。
不同之處在於DGPS採用的是虛擬距離觀測量,RTK採用的是載波相位觀測量。 定位精度平面方向5公分,高程方向10公分。 其特點在於僅用最少之相位觀測量求解週波未定值,需進行初始化約需一分鐘。 一旦求解成功,則待測點就算是不斷的移動,亦可即時得到公分級的定位精度。

110
動態相對定位 主站 移動站

111
動態相對定位之限制 有效定位距離限制 通訊及數據傳輸限制
當主站與移動站距離大於10 公里時,雖然在基線計算過程中已經過差分解算,但仍隱含很大的剩餘誤差,導致定位精度降低,甚至無法正確解算整數週波未定值情形,嚴重影響作業效能及成果品值。 通訊及數據傳輸限制 RTK作業通常使用無線電通訊設備,將主站接收之GPS 觀測資料傳送至移動站進行定位解算,在主站與移動站間距離太長或通訊品質不良時,將無法獲得完整的定位資訊,喪失即時動態定位之能力。

112
動態相對定位之限制 基準站架設模式限制 應用RTK進行外業測量前,須耗費長時間架設主站、移動站及無線電數據傳輸設備,且基準站架設之地點,須配合測區範圍不斷地調整,就作業時間與便利性觀點,不符合經濟效益。

113
靜態相對定位 相對定位的基本原理為使用至少兩部接收儀,其中一部設置於已知點上,另一部則設置於待測點上。
假設可求得待測站與已知測站間的連接基線向量,則待測站的坐標可根據已知測站坐標計算而得。

114
靜態相對定位 在兩個站同步進行觀測的情況下,衛星時鐘誤差、軌道誤差會較為一致。
若兩測站間的距離在10公里以內,則電離層與對流層折射誤差也會較為相似。 如此一來便能有助於利用兩個測站的觀測量組合,消除或減低部分誤差的影響,進而提高待測點位的定位精度。

115
靜態相對定位 因為現今的數值分析技術成熟,而且觀測量的數目相當足夠,因此在GPS相對定位的技術中,通常會選擇精度較高的載波相位觀測量。
理論上,接收儀的瞬時載波相位值,在實際量測時是無法直接測量出瞬時相位的。 載波相位觀測量,實際上就是測量接收儀內部振盪器所產生的參考載波訊號相位,與接收儀所接收到的衛星載波訊號相位之間的相位差。

116
靜態相對定位 在起始觀測時刻,接收儀會自行計算一個整週波數,來近似衛星與接收儀之間的距離,並且量得兩訊號之相位差。
在此時所量測得到的相位差,只能測定其不足一個整週波數的小數部分,而存在於衛星與接收儀之間的正確起始整週波數並無法得知,稱為週波未定值(Ambiguity)。 在觀測過程中,只要對衛星的鎖定追蹤持續不中斷,則起始整週波數將保持為常數。
。 在觀測過程中,只要對衛星的鎖定追蹤持續不中斷,則起始整週波數將保持為常數。")
117
靜態相對定位 適合長距離基線20 km以上 取代傳統三角測量 大地網控制
基線精度最高 5 mm + 1 ppm (ppm = 1/1,000,000) L = 10 km = 10,000,000 mm 10,000,000/1,000,000 = 10 mm 需較長觀測時間(1小時以上)
 L = 10 km = 10,000,000 mm. 10,000,000/1,000,000 = 10 mm. 需較長觀測時間(1小時以上)")
118
觀測步驟 一台置於已知點,另一台置於第一個未知點(同時觀測4顆以上衛星) 將已知點的接收儀,移至第二個未知點(另一台不動)
將第一個未知點的接收儀,移至第三個未知點… 直到有一個接收儀,移至另一個已知點為止…

119
網形設計 為了使規劃之網形與原有之控制網連接,測區內至少須有3個已知控制點 必須對這些已知控制點進行檢測,以保障成果的品質
藉由環路閉合差分析,可用來檢驗粗差與系統誤差,以及評定基線向量精度—以空間向量和等於零的觀念

120
共同測站與重覆觀測 在同一測區內,為了基準傳遞,不同時段之間至少需要一個共同測站
一個共同測站只能傳遞基準而已,並沒有多餘觀測條件,因此仍以兩個共同測站為佳 部份基線在不同時段內進行重覆觀測,以進行重覆性分析,多餘觀測可以提供觀測網檢核資料 利用重覆觀測可以增加基線成果的可靠度,檢驗施測的正確性以及基線解算的準確性

121
靜態相對定位 相對定位常將原始的相位觀測量進行線性組合而產生新的準觀測量,即所謂的
一次差(SingleDifference) 二次差(DoubleDifference) 三次差(TripleDifference) 又稱為差分定位,其主要目的為藉用差分過程以抵銷大部份的系統性誤差。
 二次差(DoubleDifference) 三次差(TripleDifference) 又稱為差分定位,其主要目的為藉用差分過程以抵銷大部份的系統性誤差。")
122
空中一次差(SingleDifference)
某一時刻,一接收儀同時對2顆不同衛星觀測之相位觀測值作差分,可消除接收儀時錶誤差。

123
地面一次差(SingleDifference)
某一時刻,基線兩端不同接收器對同一顆衛星相位的觀測量差分而得,可消除衛星時錶誤差。

124
二次差(DoubleDifference)
結合地面一次差及空中一次差觀測量之差分,可消除衛星時錶誤差及接收儀時錶誤差。

125
三次差(TripleDifference)
在無週波脫落(cycle slip)之情況下,可消除衛星時錶誤差與接收儀時錶誤差,也一併移去了整數週波未定值。
之情況下,可消除衛星時錶誤差與接收儀時錶誤差,也一併移去了整數週波未定值。")
126
GPS外業規劃 依據所在位置之近似坐標、觀測日期,配合最新之衛星星曆,即可繪製衛星可見圖(Sky Plot)與衛星幾何精度因子(DOP) 。
衛星可見圖是以測站為圓心,衛星仰角為半徑,衛星高度及方位角為順時鐘角度,所繪出隨時間而變化之天空透視圖,對衛星分佈可一目了然。 對同一測站而言,衛星每日提早約4分鐘出現—採用之衛星星曆日期愈接近愈佳。

127
衛星可見圖(Sky Plot)
")
128
衛星出現數

129
衛星幾何精度因子(DOP) 定位成果的好壞與接收衛星的幾何形狀有關,該項因素所引起的誤差稱為衛星幾何精度因子(DOP)。
 定位成果的好壞與接收衛星的幾何形狀有關,該項因素所引起的誤差稱為衛星幾何精度因子(DOP)。")
130
衛星數及DOP值

131
GPS衛星分佈之DOP值

132
授課內容(3) GPS誤差 衛星軌道誤差 衛星與接收儀時鐘誤差 多路徑效應誤差 天線相位中心誤差 電離層誤差 對流層誤差
 GPS誤差 衛星軌道誤差 衛星與接收儀時鐘誤差 多路徑效應誤差 天線相位中心誤差 電離層誤差 對流層誤差")
133
衛星軌道誤差 因為要計算接收儀的坐標,必須先得到衛星的坐標,因此衛星坐標的好壞與否便會影響到接收儀坐標的精度。
影響衛星坐標精度的因子必須詳細考慮並修正,方能得到精準的接收儀坐標。

134
影響GPS衛星軌道的誤差因子

135
衛星與接收儀時鐘誤差 一般衛星上的時鐘大部份是銣原子鐘,因此其與GPS時間的誤差修正量並不大,而且各衛星的廣播星曆也有提供衛星時鐘的修正參數給使用者。 至於接收儀的時鐘誤差,通常與坐標一併列入未知參數求解,因此在單點定位求解時,便可一併解出接收儀的時間誤差。 在進行差分相對定位時,通常時鐘誤差,會在 觀測量進行線性組合時消除。

136
多路徑效應誤差 GPS信號在到達地球沒有進到接收儀之前,除了主要傳送路徑之外,會產生許多鄰近目標反射/散射的路徑。
接收儀接收的首先是直接信號,然後是經過延遲的反射/散射信號。 如果反射/散射信號太強,會欺騙了接收儀,得到錯誤的位置測量結果,或根本無法鎖定衛星的位置。 這種狀況在都市地區發生的機率較高。

137
多路徑效應示意

138
天線相位中心誤差

139
電離層誤差 電離層為地球上大氣層之一部份,在距離地球表面之上50到500公里之間,由大部分為離子化的粒子組成。
自由電子含量之大小,會隨觀測地點、時刻、方位、天頂距、每日的、每年的、季節的變化而變,也會隨地磁或太陽活動大小而增減。

140
電離層誤差 GPS的信號經過離子層時,由於傳導介質的改變產生不同的信號,這種變化就像聲音在不同介質,如空氣及水中傳導引起的延遲效應一樣。

141
電離層誤差 對於GPS衛星信號來說,在夜間且當衛星處於天頂方向時,電離層折射對距離的影響將小於5 m;而在日間正午前後,沿天頂方向最大可達50 m,沿水平方向最大可達150 m。 為了減弱電離層的影響,通常利用其色散特性,使用接收儀的雙頻觀測量進行線性組合L3以求解,可達95%以上修正的效益。

142
對流層誤差 對流層折射對GPS觀測值的影響,可以分為乾遲延與濕遲延兩部分: 乾遲延主要與大氣的溫度與壓力有關
濕遲延主要與信號傳播路徑上的水氣含量有關 當衛星處於天頂方向時,對流層乾遲延的影響約佔對流層影響的90%,且這種影響可以應用地面的大氣資料計算。在天頂方向乾遲延的影響約為2.3 m,而當高度角為10°時其影響約為20 m。 濕遲延的影響數值雖不大,但由於大氣水氣參數變化大導致難以修正,所以濕遲延對衛星定位的精度有相當程度的影響,尤其是高程方面。

144
消除電離層及對流層誤差 短距離基線 長距離基線

145
SA效應(Selective Availability)
影響衛星星曆與衛星時錶改正。 精度由15 m降至SA實施後的100 m。 每一個GPS衛星的SA偏差都不相同,定位的位置誤差值是衛星SA偏差的綜合函數。 美國政府於2000年5月1日解除此碼後,此誤差已自然消除。

146
AS效應(Anti-Spoofing) 美國國防部將精度較佳之P code隱藏起來並稱為Y code,一般民間使用者只有C1可用。
GPS接收器製造廠商紛紛利用各種方法設法還原出P code供使用者使用。

147
SPS - Standard Positioning Service PPS - Precise Positioning Service






, 又 稱全球衛星定位系統 , 是美國國防部研製和維護的中距離圓型軌道衛星.>")







.>")


 格網區 及 米方格網 49Q 50Q 114°E GE HE JK KK 2 00>")

.>")


