Download presentation
1
第五章 数字滤波器设计 Filtering Beijing Institute of Technology 数字信号处理

2
5.1 概 述 数字滤波器的基本概念 数字滤波器:离散时间系统(有限精度),可完成平滑、预测,微分、积分、信号分离和噪声抑制等功能
5.1 概 述 数字滤波器:离散时间系统(有限精度),可完成平滑、预测,微分、积分、信号分离和噪声抑制等功能 频率选择数字滤波器:LTI, causal & stable 现代数字滤波器:从含有噪声的数据中估计信号的某些特征或者其本身。如:维纳滤波,卡尔曼滤波,空域滤波(阵列信号处理)等 |X(ej)| |H(ej)| |Y(ej)| p p (低通滤波) 数字滤波器的基本概念
,可完成平滑、预测,微分、积分、信号分离和噪声抑制等功能. 频率选择数字滤波器:LTI, causal & stable. 现代数字滤波器:从含有噪声的数据中估计信号的某些特征或者其本身。如:维纳滤波,卡尔曼滤波,空域滤波(阵列信号处理)等. |X(ej)| |H(ej)| |Y(ej)| p. p. (低通滤波) 数字滤波器的基本概念.")
3
频率选择 Filter? Example s2(t) s1(t) f1 S1(f) f2 S2(f) f1 f2 f H(f) f1
 s1(t) f1 S1(f) f2 S2(f) f1 f2 f H(f) f1")
4
1 2 空间选择 Filter? s2(t) s1(t) H() Example 1 2 S1(f) S2(f) f0 f0
 s1(t) H() Example 1 2 S1(f) S2(f) f0 f0")
5
From analog filter to digital filter
x(t) t t h(t) y(t) t analog filter convolution X(j) H(j) Y(j) multiplication 高频处 digitalization From analog filter to digital filter x(n) n n h(n) y(n) n digital filter convolution X(ej) 2 H(ej) 2 Y(ej) 2 multiplication 高频处
 t. t. h(t) y(t) t. analog. filter. convolution. X(j) H(j) Y(j) multiplication. 高频处. digitalization. From analog filter to digital filter. x(n) n. n. h(n) y(n) n. digital. filter. convolution. X(ej) 2 H(ej) 2 Y(ej) 2 multiplication. 高频处.")
6
两种类型频率选择数字滤波器 FIR versus IIR FIR = Finite Impulse Response filter
系统的单位脉冲响应h(n)仅有有限项,传递函数 是z-1的有限阶实系数多项式 不存在稳定性问题(无极点),可以实现线性相位 IIR = Infinite Impulse Response filter 系统的单位脉冲响应h(n)具有无限项,传递函数 是z-1的实有理函数 传递函数必须满足稳定性条件(有极点) h(n) n 1 a a2 a3 为达到相同的指标,FIR滤波器的阶数通常要高于IIR滤波器 FIR versus IIR
仅有有限项,传递函数. 是z-1的有限阶实系数多项式. 不存在稳定性问题(无极点),可以实现线性相位. IIR = Infinite Impulse Response filter. 系统的单位脉冲响应h(n)具有无限项,传递函数. 是z-1的实有理函数. 传递函数必须满足稳定性条件(有极点) h(n) n. 1. a. a2. a3. 为达到相同的指标,FIR滤波器的阶数通常要高于IIR滤波器. FIR versus IIR.")
7
FIR versus IIR IIR 滤波器 FIR 滤波器 h(n) 无限长 h(n) 有限长 极点位于 z 平面任意位置
存在极点,低阶次即可实现较好的频率选择性 存在零点,无极点,需要较高阶次实现频率选择性 非线性相位 可具有严格的线性相位 递归结构 一般采用非递归结构 不能用 FFT 技术 可用 FFT 技术 可利用模拟滤波器设计技术 设计借助于计算机 用于设计规格化的选频滤波器 可设计各种幅频特性和相频特性的滤波器

8
电路实现:将传递函数转化为方框图或程序(软件),要求经济、简单、廉价、字长短、动态范围高
技术指标 Specifications As Ap Fp Fs f 滤波器实现方案 并不唯一! 函数逼近:根据技术指标构造某一 有理传递函数H(z)或单位脉冲响应h(n): ① 幅度逼近 (巴特沃思/最平响应,切比 雪夫) ② 时域截断 ③ 频域取样 … Approximation As 参数设计 Ap Fp fp fs Fs f 电路实现:将传递函数转化为方框图或程序(软件),要求经济、简单、廉价、字长短、动态范围高 Realization (structure) a y(n) = x(n-1) - ay(n-1) x + z-1 y 缺陷研究:考虑滤波器系数的量化 效应,乘积量化影响(非相关舍入或舍入 噪声)和动态范围限制 Study of Imperfections 如果不能满足技术 要求,则需重新进 行函数逼近和(或) 电路实现 As Ap Fp Fs f 产品实现:用硬件如(DSP、专用 硬件,VLSI芯片等)或普通计算机、专 用计算机实现 Implementation 数字滤波器设计的基本步骤
或单位脉冲响应h(n): ① 幅度逼近 (巴特沃思/最平响应,切比. 雪夫) ② 时域截断 ③ 频域取样 … Approximation. As. 参数设计. Ap. Fp. fp. fs. Fs. f. 电路实现:将传递函数转化为方框图或程序(软件),要求经济、简单、廉价、字长短、动态范围高. Realization (structure) a. y(n) = x(n-1) - ay(n-1) x. + z-1. y. 缺陷研究:考虑滤波器系数的量化. 效应,乘积量化影响(非相关舍入或舍入. 噪声)和动态范围限制. Study of Imperfections. 如果不能满足技术. 要求,则需重新进. 行函数逼近和(或) 电路实现. As. Ap. Fp. Fs. f. 产品实现:用硬件如(DSP、专用. 硬件,VLSI芯片等)或普通计算机、专. 用计算机实现. Implementation. 数字滤波器设计的基本步骤.")
9
5.2 数字滤波器的结构 为什么要研究数字滤波器的实现结构?
1. 滤波器的基本特性(如有限长取样响应 FIR 与无限长取样响应 IIR)决定了结构上有不同的特点 2. 不同结构所需的存储单元及乘法次数不同,前者影响复杂性,后者影响运算速度。 3. 有限精度(有限字长)实现情况下,不同运算结构的容差性及稳定性不同。 4. 好的滤波器结构应使得滤波器性能易于控制,适合于模块化实现,便于时分复用。 为什么要研究数字滤波器的实现结构?
决定了结构上有不同的特点. 2. 不同结构所需的存储单元及乘法次数不同,前者影响复杂性,后者影响运算速度。 3. 有限精度(有限字长)实现情况下,不同运算结构的容差性及稳定性不同。 4. 好的滤波器结构应使得滤波器性能易于控制,适合于模块化实现,便于时分复用。 为什么要研究数字滤波器的实现结构?")
10
block diagram & flow graph
基本运算单元 方框图 流图 单位延时 常数乘法器 加法器 z-1 block diagram & flow graph

11
5.2.1 IIR 数字滤波器的基本结构 IIR 数字滤波器的特点: 系统函数 差分方程 1)系统的单位脉冲响应 h(n) 无限长
2)系统函数 H(z) 在有限 z 平面( )上有极点存在 3)存在输出到输入的反馈,递归型结构: 直接I、II型,级、并联型
系统函数 H(z) 在有限 z 平面( )上有极点存在. 3)存在输出到输入的反馈,递归型结构: 直接I、II型,级、并联型.")
12
5.2.1 IIR 数字滤波器的基本结构 H1(z) H2(z) x(n) u(n) y(n) H2(z) H1(z) x(n) w(n)
 H2(z) x(n) u(n) y(n) H2(z) H1(z) x(n) w(n)")
13
5.2.1 IIR 数字滤波器的基本结构 z -1 + z -1 + 需N+M个延时单元 需N+M+1个乘法器 需1个加法器 H1(z)
x(n) u(n) y(n) z -1 + x(n) u(n) b0 b1 b2 bM-1 bM z -1 + y(n) u(n) a1 a2 aN-1 aN 需N+M个延时单元 需N+M+1个乘法器 需1个加法器
 u(n) y(n) z x(n) u(n) b0. b1. b2. bM-1. bM. z y(n) u(n) a1. a2. aN-1. aN. 需N+M个延时单元. 需N+M+1个乘法器. 需1个加法器.")
14
+ 1、直接 I 型 a2 a1 x(n) b0 z-1 b1 bM-1 bM aN y(n) z-1 b0 b1 b2 bM a1 a2
 b0 z-1 b1 bM-1 bM aN y(n) z-1 b0 b1 b2 bM a1 a2")
15
直接 I 型之特点 (1)两个网络级联:第一个横向结构 M 节延时网络实现零点,第二个有反馈的 N 节延时网络实现极点
(2)共需 ( N + M ) 级延时单元 (3)系数 ak ,bk 不是直接决定单个零极点,因而不能很好地进行滤波器性能控制 (4)极点对系数变化过于灵敏,从而使系统频率响应对系数变化过于灵敏,也就是对有限精度(有限字长)运算过于灵敏,容易出现不稳定或产生较大误差
共需 ( N + M ) 级延时单元. (3)系数 ak ,bk 不是直接决定单个零极点,因而不能很好地进行滤波器性能控制. (4)极点对系数变化过于灵敏,从而使系统频率响应对系数变化过于灵敏,也就是对有限精度(有限字长)运算过于灵敏,容易出现不稳定或产生较大误差.")
16
5.2.1 IIR 数字滤波器的基本结构 + + z -1 z -1 + + z -1 z -1 + + z -1 z -1
H2(z) H1(z) x(n) w(n) y(n) x(n) w(n) w(n) b0 y(n) + + z -1 z -1 a1 b1 + + z -1 z -1 a2 b2 + + z -1 z -1 需max(N,M)个延时单元 需N+M+1个乘法器 bM-1 aN-1 + 需2个加法器 + z -1 z -1 bM aN
 H1(z) x(n) w(n) y(n) x(n) w(n) w(n) b0. y(n) + + z -1. z -1. a1. b z -1. z -1. a2. b z -1. z -1. 需max(N,M)个延时单元. 需N+M+1个乘法器. bM-1. aN-1. + 需2个加法器. + z -1. z -1. bM. aN.")
17
2、直接 II 型 (典范型) 只需实现 N 阶滤波器所需的 最少的 N 个延时单元,故又 称典范型(N M) z-1 x(n) a2
aN w(n) y(n) b0 b1 bM-1 bM 只需实现 N 阶滤波器所需的 最少的 N 个延时单元,故又 称典范型(N M) x(n) a2 a1 z-1 a3 w(n) y(n) b0 b1 b2 b3 2、直接 II 型 (典范型)
 y(n) b0. b1. bM-1. bM. 只需实现 N 阶滤波器所需的. 最少的 N 个延时单元,故又. 称典范型(N M) x(n) a2. a1. z-1. a3. w(n) y(n) b0. b1. b2. b3. 2、直接 II 型 (典范型)")
18
转置定理 原网络中所有支路方向倒转,并将输入 x(n) 和输出 y(n) 相互交 换,则其系统函数 H(z) 不改变
 和输出 y(n) 相互交 换,则其系统函数 H(z) 不改变")
19
直接型的优点: 直接型的共同缺点: 2、直接 II 型 (典范型) 简单、直观 系数 , 与零极点关系不直接,不易控制和调整滤波器的性能
系数 , 与零极点关系不直接,不易控制和调整滤波器的性能 极点对系数(零极点位置)的变化过于灵敏,易出现不稳定或较大误差(特别是高阶数零点很多且距离很近时) 运算的累积误差较大 Very sensitive to the effects of coefficients quantization if N or M is large !!! 2、直接 II 型 (典范型)
的变化过于灵敏,易出现不稳定或较大误差(特别是高阶数零点很多且距离很近时) 运算的累积误差较大. Very sensitive to the effects of coefficients quantization if N or M is large !!! 2、直接 II 型 (典范型)")
20
* * * 3、级联型:Cascade 将系统函数按零极点因式分解: 为常数, 和 分别为实数零、极点 和 分别为复共轭零、极点
cascade of biquads 3、级联型:Cascade

21
example 组合优化 3、级联型 将共轭成对的复数组合成二阶多项式(系数为实数),为采用相同
结构的子网络,将两个实零点/极点组合成二阶多项式,得到: H1(z) H2(z) HK(z) x(n) y(n) z-1 z-1 example 组合优化 3、级联型
 H2(z) HK(z) x(n) y(n) z-1. z-1. example. 组合优化. 3、级联型.")
22
级联型的特点: 3、级联型 调整系数 , 能单独调整滤波器的第 k 对零点,而不影响其它零极点
滤波器频率响应性能调整方便 运算的累积误差较小 所需存储单元少,可实现时分复用 组合方式多 Much less sensitive to the effects of coefficients quantization!!!! 3、级联型

23
Computation complexity
将 H(z) 展成部分分式之和: 其中 均为实数 消失 avoid: Error propagation Computation complexity 4、并联型:Parallel
 展成部分分式之和: 其中 均为实数. 消失. avoid: Error propagation. Computation complexity. 4、并联型:Parallel.")
24
4、并联型 一、二阶基本节 并联型的特点: 通过调整系数 , 可单独调整一对极点位置,但不能单独调整零点位置
H1(z) H2(z) HK(z) x(n) y(n) G0 z-1 z-1 z-1 一、二阶基本节 并联型的特点: 通过调整系数 , 可单独调整一对极点位置,但不能单独调整零点位置 各并联基本节的误差互相不影响,故运算累积误差小 可进行并行运算,运算速度高 4、并联型
 H2(z) HK(z) x(n) y(n) G0. z-1. z-1. z-1. 一、二阶基本节. 并联型的特点: 通过调整系数 , 可单独调整一对极点位置,但不能单独调整零点位置. 各并联基本节的误差互相不影响,故运算累积误差小. 可进行并行运算,运算速度高. 4、并联型.")
25
例:设 IIR 数字滤波器差分方程为: 试用四种基本结构实现此差分方程。 解:对差分方程两边取 z 变换,得系统函数:

26
直接 I 型结构: 直接 II 型结构:

27
将 H(z) 因式分解: 得级联型结构:
 因式分解: 得级联型结构:")
28
将 H(z) 部分分式分解: 得并联型结构:
 部分分式分解: 得并联型结构:")
29
5.2.2 FIR数字滤波器的基本结构 FIR数字滤波器的特点: 系统函数: 差分方程: 1)系统的单位抽样响应 h(n) 有限长(N点)
2)系统函数 H(z) 在 处收敛,有限 z 平面只有零点,全部极点在 z = 0 处(因果系统) 3)无输出到输入的反馈,一般为非递归型结构
系统函数 H(z) 在 处收敛,有限 z 平面只有零点,全部极点在 z = 0 处(因果系统) 3)无输出到输入的反馈,一般为非递归型结构.")
30
1、横截型 (卷积型、直接型) 转置型 系统响应特性不易控制和调整 x(n) z-1 z-1 z-1 h(0) h(1) h(2)
h(N-2) h(N-1) y(n) Tapped-delay line(N-1)delays N multipliers 1 adder(N inputs) 转置型 y(n) z-1 z-1 z-1 z-1 h(N-1) h(N-2) h(2) h(1) h(0) x(n) 系统响应特性不易控制和调整 1、横截型 (卷积型、直接型)
 h(N-1) y(n) Tapped-delay line(N-1)delays. N multipliers. 1 adder(N inputs) 转置型. y(n) z-1. z-1. z-1. z-1. h(N-1) h(N-2) h(2) h(1) h(0) x(n) 系统响应特性不易控制和调整. 1、横截型 (卷积型、直接型)")
31
2、级联型 当需要灵活方便地控制滤波器的传输零点时,可将 H(z) 分解成实系 数二阶因式的乘积形式:
由于这种结构所需的系数比直接型多,所需乘法运算也比直接型多,很少用 由于这种结构的每一节控制一对零点,因而通常仅在需要控制传输零点时用 2、级联型

32
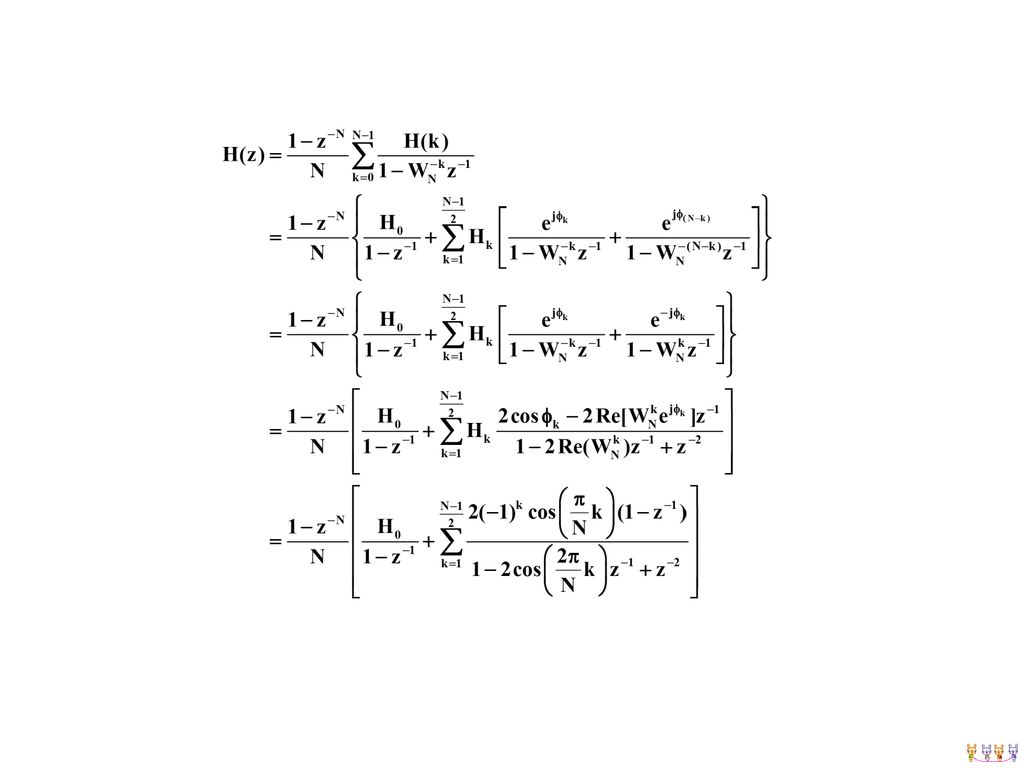
3、频率取样型 N 个频率抽样 H(k) 恢复 H(z) 的内插公式:
由此得到 FIR 滤波器的另一种结构:频率抽样型结构,它由两部分级联而成: (1)梳状滤波器: 2 jIm[z] Re[z] 3、频率取样型 全零点系统
梳状滤波器: 2. jIm[z] Re[z] 3、频率取样型. 全零点系统.")
33
3、频率取样型 (2)由 N 个谐振器组成的谐振“柜”: 组成该谐振柜的第 k 个谐振器 为一阶网络,它存在一个位于 的极点,并在该处发生谐
为一阶网络,它存在一个位于 的极点,并在该处发生谐 振,即 ,而该极点正好与梳状滤波器的第 k 个零点相抵消,从而使这个频率上的频率响应等于 H(k): 将两部分级联起来,便得到所谓的频率抽样结构 3、频率取样型
: 将两部分级联起来,便得到所谓的频率抽样结构. 3、频率取样型.")
34
- 3、频率取样型 调整H(k)就可以有效地调整频响特性(在 频率 k = 2k/N 处 的响应即为H(k)
若h(n)长度相同,则除了各支路增益H(k)外网络结构完全相同,便于标准化、模块化 有限字长效应可能导致零极点不能完全对消(梳状滤波器的零点由延时器形成,并不受量化误差影响),导致系统不稳定 系数多为复数,增加了复数乘法和存储量 z-1 z-N - 1/N H(0) H(1) H(N-1) x(n) y(n) 3、频率取样型
长度相同,则除了各支路增益H(k)外网络结构完全相同,便于标准化、模块化. 有限字长效应可能导致零极点不能完全对消(梳状滤波器的零点由延时器形成,并不受量化误差影响),导致系统不稳定. 系数多为复数,增加了复数乘法和存储量. z-1. z-N. - 1/N. H(0) H(1) H(N-1) x(n) y(n) 3、频率取样型.")
35
3、修正之频率取样型 将零极点移至半径为 r 的圆上: 此时,谐振柜的第 k 个谐振器的极点变为 为了使系数是实数,可将共轭根合并,
jIm[z] 为了使系数是实数,可将共轭根合并, 这些共轭根在半径为 r 的圆周上以实轴 成对称分布: r Re[z] -1 1 由对称性: 又 h(n) 为实数,则 3、修正之频率取样型
 为实数,则. 3、修正之频率取样型.")
36
将第 k 个和第 (N-k) 个谐振器合并成一个实系数的二阶网络:
其中 remarks 第 k 和第 N-k 个谐振器合并为一个二阶 网络的极点在单位圆内,而不是在单位圆 上,因而从频率响应的几何解释可知, 它相当于一个有限 Q 的谐振器。其谐振 频率为:

37
当 N 为偶数时,还有一对实数根,分别在 k = 0, N/2 两点

38
H0(z) H1(z) x(n) y(n) - 1/N r r Hk(z) z-1 z-1 HN/2(z) z-1 z-1
 H1(z) x(n) y(n) - 1/N r r Hk(z) z-1 z-1 HN/2(z) z-1 z-1")
39
修正频率采样结构的特点 (1)结构有递归部分--谐振柜;又有非递归部分--梳状滤波器 (2)它的零、极点数目只取决于单位脉冲响应的长度,因而单位脉冲 响应长度相同,利用同一梳状滤波器、同一结构而只有加权系数 0k、1k、H(0)、H(N/2)不同的谐振器,就能得到不同的滤波器 (3)其结构可以高度模块化,可时分复用 修正频率采样结构的应用范围 (1)如果多数频率特性的采样值 H(k) 为零,例:窄带低通情况下,这时 谐振器减少,因而可以比直接型少用乘法器,但存储器还是比直接型 多用一些 (2)可以共同使用多个并列的滤波器。例:信号频谱分析中,要求同时将 信号的各种频率分量分别滤出来,这时可采用频率采样结构的滤波 器,大家共用一个梳状滤波器及谐振柜,只是将各谐振器的输出适当 加权组合就能组成各所需的滤波器。这样的结构具有很大的经济性 (3)常用于窄带滤波,不适于宽带滤波
、H(N/2)不同的谐振器,就能得到不同的滤波器. (3)其结构可以高度模块化,可时分复用. 修正频率采样结构的应用范围. (1)如果多数频率特性的采样值 H(k) 为零,例:窄带低通情况下,这时. 谐振器减少,因而可以比直接型少用乘法器,但存储器还是比直接型. 多用一些. (2)可以共同使用多个并列的滤波器。例:信号频谱分析中,要求同时将. 信号的各种频率分量分别滤出来,这时可采用频率采样结构的滤波. 器,大家共用一个梳状滤波器及谐振柜,只是将各谐振器的输出适当. 加权组合就能组成各所需的滤波器。这样的结构具有很大的经济性. (3)常用于窄带滤波,不适于宽带滤波.")
40
L点FFT L点IFFT x(n) h(n) X(k) H(k) Y(k) 4、快速卷积结构
 h(n) X(k) H(k) Y(k) 4、快速卷积结构")
41
N 阶线性相位响应 FIR 滤波器单位抽样响应 h(n) 满足下述条件:
 满足下述条件:")
42
even odd h(n) 偶对称,取“+” h(n) 奇对称,取“-”,且 ± ± ± ± ± ± ± ± x(n) z-1 z-1
Tapped-delay line (N-1) delays (N+1)/2 multipliers (N-1)/2 adders (2 inputs) 1 adder (N+1)/2 inputs y(n) x(n) symmetric FIR z-1 z-1 z-1 z-1 odd z-1 z-1 z-1 z-1 h(0) h(1) h(2) h[(N-3)/2] h[(N-1)/2] y(n) h(n) 偶对称,取“+” h(n) 奇对称,取“-”,且
 delays. (N+1)/2 multipliers. (N-1)/2 adders (2 inputs) 1 adder (N+1)/2 inputs. y(n) x(n) symmetric FIR. z-1. z-1. z-1. z-1. odd. z-1. z-1. z-1. z-1. h(0) h(1) h(2) h[(N-3)/2] h[(N-1)/2] y(n) h(n) 偶对称,取 + h(n) 奇对称,取 - ,且.")
43
alternatively!

44
例:画出 4 阶和 5 阶线性相位 FIR 数字滤波器实现结构:
(1)N = 4,h(0) = h(3);h(1) = h(2) H(z) = h(0) + h(1)z-1 + h(2)z-2 + h(3)z-3 = h(0)[1 + z-3] + h(1)[z-1 + z-2] x(n) z-1 z-1 z-1 h(0) h(1) y(n) (2)N = 5,h(0) = h(4);h(1) = h(3) H(z) = h(0) + h(1)z-1 + h(2)z-2 + h(3)z-3 + h(4)z-4 = h(0)[1 + z-4] + h(1)[z-1 + z-3] + h(2)z-2 x(n) z-1 z-1 z-1 z-1 h(0) h(1) h(2) y(n)
N = 4,h(0) = h(3);h(1) = h(2) H(z) = h(0) + h(1)z-1 + h(2)z-2 + h(3)z-3 = h(0)[1 + z-3] + h(1)[z-1 + z-2] x(n) z-1. z-1. z-1. h(0) h(1) y(n) (2)N = 5,h(0) = h(4);h(1) = h(3) H(z) = h(0) + h(1)z-1 + h(2)z-2 + h(3)z-3 + h(4)z-4 = h(0)[1 + z-4] + h(1)[z-1 + z-3] + h(2)z-2. x(n) z-1. z-1. z-1. z-1. h(0) h(1) h(2) y(n)")
45
回顾:数字滤波器的设计步骤 确定技术指标 利用合适的方法确定滤波器系数 选择合适的滤波器实现结构 分析有限字长效应 实现 确定技术指标
有针对性:频率选择能力 不能过分:过犹不及 确定技术指标 利用合适的方法确定滤波器系数 选择合适的滤波器实现结构 分析有限字长效应 实现 确定技术指标 利用合适的方法确定滤波器系数 选择合适的滤波器实现结构 分析有限字长效应 实现 确定技术指标 利用合适的方法确定滤波器系数 选择合适的滤波器实现结构 分析有限字长效应 实现 复习

46
5.3、数字滤波器的指标 鱼和熊掌 不可兼得 低通 高通 带通 带阻 (1)幅度(平方)频响:选频特性
四种典型的频率选择滤波器及指标 1 低通 高通 带通 带阻 HLP(ej) HHP(ej) HBP(ej) HBS(ej) -2 -1 - 2 1 -p p 低频 中频 高频 (1)幅度(平方)频响:选频特性 (2)相位频响:对输出波形有要求:语音合成、波形传输、图像处理 (3)群延迟:相位响应对频率导数的负值:常数-〉线性相位 (4)在某些应用场合,也常以单位抽样响应或单位阶跃响应作为滤波器指标 鱼和熊掌 不可兼得
 HHP(ej) HBP(ej) HBS(ej) -2. -1. - 2. 1. -p. p. 低频. 中频. 高频. (1)幅度(平方)频响:选频特性. (2)相位频响:对输出波形有要求:语音合成、波形传输、图像处理. (3)群延迟:相位响应对频率导数的负值:常数-〉线性相位. (4)在某些应用场合,也常以单位抽样响应或单位阶跃响应作为滤波器指标. 鱼和熊掌. 不可兼得.")
47
不能过分贪婪! noncausal 理想选频? * 单位抽样响应无限长:非因果 * 单位阶跃响应存在过冲和振铃现象 -p p -
1 -p p - * 单位阶跃响应存在过冲和振铃现象 noncausal

48
数字滤波器技术指标: 幅频响应 以低通为例 |H(ej)|2 |H(j)|2 1
Wp, wp :通带截止频率(passband edge frequency) Ws, ws :阻带截止频率(stopband edge frequency) e2 :通带波动(passband ripple parameter) = -20log10(1 + 2) Wc, wc :3dB截止频率(cutoff frequency) 阻带衰减(stopband attenuation in dB) = 20log10(d) 通带波动 (1+2)-1 0.5 通带 过渡带 阻带 以低通为例 p c s p c s
 Ws, ws :阻带截止频率(stopband edge frequency) e2 :通带波动(passband ripple parameter) = -20log10(1 + 2) Wc, wc :3dB截止频率(cutoff frequency) 阻带衰减(stopband attenuation in dB) = 20log10(d) 通带波动. (1+2) 通带. 过渡带. 阻带. 以低通为例. p. c. s. p. c. s. ")
49
5.4、滤波器参数的确定方法(IIR) 确定技术指标 利用合适的方法确定滤波器系数 选择合适的滤波器实现结构 分析有限字长效应 实现
 确定技术指标 利用合适的方法确定滤波器系数 选择合适的滤波器实现结构 分析有限字长效应 实现")
50
IIR数字滤波器参数的确定方法 1、从模拟低通滤波器 设计数字低通滤波器 (1)脉冲响应不变法 (2)双线性变换法 一、从模拟滤波器
设计数字滤波器 (1)直接由模拟原型 到各种类型数字滤波器 的转换 (2)从数字低通滤波 器到各种类型数字滤 波器的转换 2、IIR数字低通滤波器 的频率变换(高通、带 通、带阻数字滤波器的 设计 (1)零、极点位置累 试法(点阻滤波器) (2)幅度平方函数法 1、IIR数字低通滤波器 的频域直接设计方法 IIR数字滤波 器设计 二、直接设计IIR数 字滤波器 (1)帕德逼近法 (2)波形形成滤波器 设计 2、IIR数字低通滤波器 的时域直接设计方法 1、最小均方误差方法 2、最小p误差方法 3、最小平方逆设计法 4、线性规划设计方法 三、IIR数字滤波器 的优化设计方法
直接由模拟原型. 到各种类型数字滤波器. 的转换. (2)从数字低通滤波. 器到各种类型数字滤. 波器的转换. 2、IIR数字低通滤波器. 的频率变换(高通、带. 通、带阻数字滤波器的. 设计. (1)零、极点位置累. 试法(点阻滤波器) (2)幅度平方函数法. 1、IIR数字低通滤波器. 的频域直接设计方法. IIR数字滤波. 器设计. 二、直接设计IIR数. 字滤波器. (1)帕德逼近法. (2)波形形成滤波器. 设计. 2、IIR数字低通滤波器. 的时域直接设计方法. 1、最小均方误差方法. 2、最小p误差方法. 3、最小平方逆设计法. 4、线性规划设计方法. 三、IIR数字滤波器. 的优化设计方法.")
51
数字—〉模拟—〉数字 ? 可以利用模拟滤波器较为成熟的设计理论和方法
很多模拟滤波器设计方案具有简单的闭式设计公式,由此可得到简单的数字滤波器设计 将适用于模拟滤波器设计的标准近似方法直接移植于数字滤波器的设计当中,未必能够得到简单的闭式解

52
模拟原型滤波器数字化方法(低通) 根据给定指标设计模拟原型低通滤波器 将模拟原型滤波器数字化 根据给定指标设计模拟原型低通滤波器
贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter)(熟练掌握) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform) 根据给定指标设计模拟原型低通滤波器 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)
 巴特沃思滤波器(Butterworth Filter)(熟练掌握) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I. Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform) 根据给定指标设计模拟原型低通滤波器. 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I. Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)")
53
5.4.1、巴特沃思滤波器:幅度平方频率响应 低通巴特沃思滤波器是全极点系统 N 阶幅度平方频率响应为
其中N为滤波器阶数,c为3dB截止频 率;p为通带截止频率;(1+2)-1为通 带截止频率处幅度平方频响值 在阻带截止频率s处 |Ha(j)|2 1 (1+2)-1 0.5 N↑ p c s
-1为通. 带截止频率处幅度平方频响值. 在阻带截止频率s处. |Ha(j)|2. 1. (1+2) N↑ p. c. s. ")
54
5.4.1、巴特沃思滤波器:极点分布 Qa(s) 有偶数个极点,它们关于虚轴对称
由 Qa(s) 确定 Ha(s),结果并不唯一,但只有一种情形对应于因果系统(也即极点均在 s 左半平面),以此作为巴特沃思滤波器的 Ha(s)
 确定 Ha(s),结果并不唯一,但只有一种情形对应于因果系统(也即极点均在 s 左半平面),以此作为巴特沃思滤波器的 Ha(s)")
55
5.4.1、巴特沃思滤波器:极点分布 先考察 Qa(s) 的极点分布: /N
 的极点分布: /N")
56
5.4.1、巴特沃思滤波器:系统函数 阶次 1 2 3 4 滤波器之阶数:N 3dB截止频率:c

57
5.4.2、模拟原型滤波器数字化(低通) 根据给定指标设计模拟原型低通滤波器 将模拟原型滤波器数字化 根据给定指标设计模拟原型低通滤波器
贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I(了解) Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform) 根据给定指标设计模拟原型低通滤波器 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)
 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I(了解) Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform) 根据给定指标设计模拟原型低通滤波器. 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I. Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)")
58
Chebyshev Filters:切比雪夫滤波器
N 阶幅度平方频率响应为 其中CN()为 N 阶切比雪夫多项式: 切比雪夫II 型(逆切比雪夫)模拟低 通滤波器 |Ha(j)|2 1 N为偶数 N为奇数 N为奇数 (1+2)-1 N为偶数 s p s 带内极值点个数 = N
为 N 阶切比雪夫多项式: 切比雪夫II 型(逆切比雪夫)模拟低. 通滤波器. |Ha(j)|2. 1. N为偶数. N为奇数. N为奇数. (1+2)-1. N为偶数. s. p. s. 带内极值点个数 = N.")
59
5.4.2、模拟原型滤波器数字化(低通) 根据给定指标设计模拟原型低通滤波器 将模拟原型滤波器数字化 根据给定指标设计模拟原型低通滤波器
贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform) 根据给定指标设计模拟原型低通滤波器 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)
 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I. Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform) 根据给定指标设计模拟原型低通滤波器. 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I. Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)")
60
5.4.2、模拟原型滤波器数字化(低通) 原理 首先按一定指标设计出满足要求的模拟原型滤波器,再将其通过某种方式数字化 转换方法
— 将微分方程转换为差分方程 — 将连续时间单位冲激响应ha(t)转换为离散时间单位脉冲响应h(n) — 将传递函数Ha(s)直接通过某种映射关系转换为系统函数H(z) 要求 ① s-平面的左半平面应映射至z-平面的单位圆内,即系统稳定性要在转换中能够保持;② 保形要求(频率选择能力)
转换为离散时间单位脉冲响应h(n) — 将传递函数Ha(s)直接通过某种映射关系转换为系统函数H(z) 要求. ① s-平面的左半平面应映射至z-平面的单位圆内,即系统稳定性要在转换中能够保持;② 保形要求(频率选择能力)")
61
5.4.2、模拟原型滤波器数字化(低通) 根据给定指标设计模拟原型低通滤波器 将模拟原型滤波器数字化 根据给定指标设计模拟原型低通滤波器
贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变:时域方法 双线性变换(Bilinear Transform) 根据给定指标设计模拟原型低通滤波器 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)
 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I. Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变:时域方法. 双线性变换(Bilinear Transform) 根据给定指标设计模拟原型低通滤波器. 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I. Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)")
62
① 脉冲响应不变法(Impulse Invariance) Rader & Golden
Time domain Frequency domain Ha(j) t ha(t) n h(n) = ha(nT) H(T) … 2/T n h1(n) = ha(nT1) H1(T1) … 2/T1 1/T
 t. ha(t) n. h(n) = ha(nT) H(T) … 2/T. n. h1(n) = ha(nT1) H1(T1) … 2/T1. 1/T.")
63
① 脉冲响应不变法(Impulse Invariance) Rader & Golden
ILT sampling |eskT| Re(z) jIm(z) 1 ? ZT 极点变化: si -> esiT 模拟稳定,数字化后亦稳定 How H(z) is obtained from Ha(s)?
 jIm(z) 1. ? ZT. 极点变化: si -> esiT. 模拟稳定,数字化后亦稳定. How H(z) is obtained from Ha(s)")
64
问题:混叠效应 Ha(j) -/T /T -/T /T - 阻带性能降低
 -/T /T -/T /T - 阻带性能降低 ")
65
问题:增益过高(T-1) Ha(j) H(ejω) T-1
 Ha(j) H(ejω) T-1 ")
66
脉冲响应不变法的主要步骤 步骤一: 确定滤波器的技术指标(通常在数字域给出) 步骤二: 对截止频率作如下线性变换(如果给定的是数字指标):
通、阻带的波动 通、过渡、阻带的截止频率 频率选择特性(低通) 步骤二: 对截止频率作如下线性变换(如果给定的是数字指标): = /T 步骤三: 选择模拟逼近方法(巴特沃思)并确定其传递函数 Ha(s); 步骤四: 按下述方法将 Ha(s) 转变为 H(z),完成数字化: 步骤五: 检验结果是否满足指标,如果不满足,返回步骤三
 步骤二: 对截止频率作如下线性变换(如果给定的是数字指标): = /T. 步骤三: 选择模拟逼近方法(巴特沃思)并确定其传递函数 Ha(s); 步骤四: 按下述方法将 Ha(s) 转变为 H(z),完成数字化: 步骤五: 检验结果是否满足指标,如果不满足,返回步骤三. ")
67
|Ha-Butterworth(j)|2
-2 |H(ej)|2 p c -3 s -16 0.2 0.6 -2 -16 |Ha-Butterworth(j)|2 1 -3 p c s 0.2/T 0.6/T
|2. p. c. -3. s 0.6 |Ha-Butterworth(j)|2. p. c. s. 0.2/T. 0.6/T.")
68
damped sinusoid: NOT sinc

69
由于混叠效应,数字化后阻带性 能下降,并不满足最初要求 !! c 0.72/ 0.23 in

70
5.4.2、模拟原型滤波器数字化(低通) 根据给定指标设计模拟原型低通滤波器 将模拟原型滤波器数字化 根据给定指标设计模拟原型低通滤波器
贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变(Impulse Invariance) 双线性变换:频域方法 根据给定指标设计模拟原型低通滤波器 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I Chebyshev Type II or Inverse Chebyshev Filter 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)
 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I. Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变(Impulse Invariance) 双线性变换:频域方法. 根据给定指标设计模拟原型低通滤波器. 贝塞尔滤波器(Bessel Filter) 巴特沃思滤波器(Butterworth Filter) 切比雪夫滤波器(Chebyshev Filter) Chebyshev Type I. Chebyshev Type II or Inverse Chebyshev Filter. 椭圆滤波器(Elliptic Filter) 将模拟原型滤波器数字化. 脉冲响应不变(Impulse Invariance) 双线性变换(Bilinear Transform)")
71
② 双线性变换方法(Bilinear Transformation) Kaiser & Golden
复习 首先回顾一下脉冲响应不变法: 设计在时域进行: 在频域的表现: 能否直接在频域直接进行设计呢?(保形、因果稳定) 以严格控制重要频点处滤波器的响应 在时域的表现(不甚重要):
 以严格控制重要频点处滤波器的响应. 在时域的表现(不甚重要):")
72
② 双线性变换方法(Bilinear Transformation) Kaiser & Golden
频域映射准则: 1 Re(z) j jIm(z) (1)因果稳定性数字化后可以保持
 j jIm(z) (1)因果稳定性数字化后可以保持.")
73
ignore 时域解释:微分方程—〉差分方程 考虑第 k 个一阶子系统,其微分方程为 注意到 ha,k(t) x(t) y(t) hk(n)
x(n) y(n) 注意到 (n-1)T nT y (t) t
 y(n) 注意到. (n-1)T. nT. y (t) t.")
74
② 双线性变换方法(Bilinear Transformation) Kaiser & Golden
保形情况?: - = T = 2arctan(T/2)
")
75
② 双线性变换方法(Bilinear Transformation) Kaiser & Golden
保形情况?: Ha(j) -/T p /T * 变形 2 2 * 预畸 p H(ej) - - -2 -2
 -/T. p. /T. * 变形. 2 2 * 预畸. p. H(ej) - - -2 -2")
76
为什么要预畸呢? 若数字带通滤波器的四个截止频率为 按线性变换所对应的四个模拟截止频率分别为: 再进行模拟带通滤波器的系统函数的求解;
若数字带通滤波器的四个截止频率为 按线性变换所对应的四个模拟截止频率分别为: 再进行模拟带通滤波器的系统函数的求解; 求出后,如用双线性变换将模拟滤波器变换成为数字滤波器 显然就不等于原来给出的数字滤波器的频率要求,即现在带通的四个截止频率不等于原来的 ,需对第二步进行预畸: 1 2 3 4 1 2 3 4 Important !!!

77
双线性变换法的主要步骤 步骤一: 确定滤波器的技术指标(通常在数字域给定) 步骤二: 进行下述频率预畸(针对数字域指标):
通、阻带的波动 通、过渡、阻带的截止频率 频率选择特性(低通) 步骤二: 进行下述频率预畸(针对数字域指标): = (2/T) tan(/2) 步骤三: 选择模拟逼近方法(巴特沃思)并确定其传递函数 Ha(s); 步骤四: 双线性变换,即将 Ha(s) 中的“s”按下式进行变换以得到 H(z), 而完成数字化: s = (2/T)[(1-z-1)/(1+z-1)] 步骤五: 检验结果是否满足指标,如果不满足,返回步骤三
 步骤二: 进行下述频率预畸(针对数字域指标): = (2/T) tan(/2) 步骤三: 选择模拟逼近方法(巴特沃思)并确定其传递函数 Ha(s); 步骤四: 双线性变换,即将 Ha(s) 中的 s 按下式进行变换以得到 H(z), 而完成数字化: s = (2/T)[(1-z-1)/(1+z-1)] 步骤五: 检验结果是否满足指标,如果不满足,返回步骤三.")
78
|Ha-Butterworth(j)|2
-2 |H(ej)|2 p c -3 s -16 0.2 0.6 -2 -16 |Ha-Butterworth(j)|2 1 -3 p c s 2tan(0.1)/T 2tan(0.3)/T
|2. p. c. -3. s 0.6 |Ha-Butterworth(j)|2. p. c. s. 2tan(0.1)/T. 2tan(0.3)/T.")
80
2tan(0.3)
")
81
ignore 数字高通、带通、带阻滤波器的设计 把一个归一化原型模拟低通滤波器变换成另一个所需类型的模拟滤波器,再将其数字化
直接从模拟滤波器通过一定的频率变换关系完成所需类型数字滤波器的设计 先设计低通型的数字滤波器,再用数字频率变化方法将其转换成所需类型数字滤波器 模拟-模拟频带变换 数字化 模拟高通 带通带阻 数字高通 带通带阻 模拟原型 模拟-数字频率变换 数字高通 带通带阻 模拟原型 数字化 数字-数字频带变换 数字低通 滤波器 数字高通 带通带阻 模拟原型

82
5.5、滤波器参数的确定方法(FIR) 一、窗函数方法: Windowing 二、频率采样方法: Frequency-Sampling
三、优化设计方法:Optimum Approximations 四、Least-Squares Inverse (Wiener) Filter FIR数字滤波 器的设计 1、瑞梅兹交换法 2、线性规划方法 低通、高通、带通、带阻均要掌握
 Filter. FIR数字滤波. 器的设计. 1、瑞梅兹交换法. 2、线性规划方法. 低通、高通、带通、带阻均要掌握.")
83
IIR-DF —〉FIR-DF ? IIR滤波器幅度特性好,但一般无法实现线性相位,需附加调相网络 IIR滤波器需要注意稳定性问题
由于单位冲激、脉冲响应特点不同,IIR滤波器设计方法不能移植于FIR滤波器的设计 在图像处理,数据传输和现代通信系统中多要求系统具有线性相位特性。方便起见,很多时候均使用FIR滤波 FIR滤波可利用快速傅立叶变换 鉴于FIR滤波器可以做到线性相位,可专门讨论线性相位FIR滤波器的设计,因为若对相位响应不感兴趣,可用阶数低很多的IIR滤波实现

84
ignore 5.5.1、线性相位响应 FIR 数字滤波器 ① 线性相位条件: 若单位脉冲响应序列为中心偶对称或
中心奇对称,系统具有线性相位响应 s(n) symmetry or anti-symmetry is necessary!
 symmetry or anti-symmetry is necessary!")
85
② 线性相位FIR系统的频域特点 Case 1: h(n)中心偶对称,N 为奇数 h(n) n (N = 7)
中心偶对称,N 为奇数 h(n) n (N = 7)")
86
定义一个 (N + 1)/2 点序列 a(n): 这里H()并不是 幅频响应,其值 可正可负!!! 注意:H()为实函数,
2 H() = H(2-) 注意:H()为实函数, 称为幅度函数(符幅频率响应), 它与幅度频率响应的关系为: |H()| = |H(ej)| 2 θ() -(N-1)
 = H(2-) 注意:H()为实函数, 称为幅度函数(符幅频率响应), 它与幅度频率响应的关系为: |H()| = |H(ej)| 2 θ() -(N-1)")
87
H() θ() |H(ej)| arg[H(ej)]
2 h(n) a(n) 1.5 1 0.5 -0.5 -1 -1.5 -2 -2.5 -3 H() θ() |H(ej)| arg[H(ej)]
![H() θ() |H(ej)| arg[H(ej)]](http://slidesplayer.com/slide/14664814/90/images/87/H%28%EF%81%B7%29+%CE%B8%28%EF%81%B7%29+%7CH%28ej%EF%81%B7%29%7C+arg%5BH%28ej%EF%81%B7%29%5D.jpg "2. h(n) a(n) H() θ() |H(ej)| arg[H(ej)]")
88
幅频响应:可实现 相频响应:线性相 特点 低通、高通、带通 带阻四种选频特性 位响应: H() θ() |H(ej)|
6 h(n) a(n) 5 4 3 2 1 2 4 6 2 4 6 H() - θ() -3 -5 |H(ej)| arg[H(ej)]
 a(n) H() - θ() -3 -5 |H(ej)| arg[H(ej)]")
89
幅频响应:不可实 相频响应:线性相 特点 Case 2: h(n)中心偶对称,N 为偶数 现高通、带阻两种 选频特性 位响应:
null, high pass, band-stop? 2 定义一个 (N/2 + 1) 点序列 b(n): H() = -H(2-) H() 0 θ() 2 -(N-1)
 点序列 b(n): H() = -H(2-) H() 0. θ() 2 -(N-1)")
90
幅频响应:只可实 相频响应:线性相 特点 Case 3: h(n)中心奇对称,N 为奇数 现带通选频特性 位响应:
定义一个 (N + 1)/2 点序列 c(n): 2 nulls H() = -H(2-) H(0) = H() = H(2) 0 2 θ() -(N-3/2) /2
/2 点序列 c(n): 2 nulls. H() = -H(2-) H(0) = H() = H(2) 0. 2 θ() -(N-3/2) /2.")
91
幅频响应:不可实 相频响应:线性相 Case 4: h(n)中心奇对称,N 为偶数 特点 现低通、带阻选频 特性 位响应:
定义一个 N/2 + 1 点序列 d(n): 幅频响应:不可实 现低通、带阻选频 特性 相频响应:线性相 位响应: 特点 H() 2 nulls 2 θ() -(N-3/2) /2 H() = H(2-) H(0) = H(2) 0
: 幅频响应:不可实. 现低通、带阻选频. 特性. 相频响应:线性相. 位响应: 特点. H() 2 nulls. 2 θ() -(N-3/2) /2. H() = H(2-) H(0) = H(2) 0.")
92
② 线性相位FIR系统的频域特点 h(n)的中心对称性: h(n)的实值性: 线性相位响应 FIR 系统零点的特点
的中心对称性: h(n)的实值性: 线性相位响应 FIR 系统零点的特点")
93
How to derive H(ej) from h(n)?
A summary: 线性相位FIR滤波器的四种情况 h(n) = h(N-n-1) ① 时域: ② 频域: ③ 零点: 成倒数、共轭对出现 重点掌握 h(n) 奇数N () = -(N-1)/2 () a(n) 1) 2 2 (N-1)/2 偶数N h(n) 2) -(N-1) b(n) 2 N/2 线性相位 FIR 数字滤波器特点 h(n) = -h(N-n-1) — H 为符幅频响(实) — h(n) 中心偶对称:L = 0 — h(n) 中心奇对称:L = 1 h(n) 奇数N () = /2-(N-1)/2 A(), B(), C(), D() () 3) c(n) 2 /2 2 (N-1)/2 偶数N h(n) -(N-3/2) 4) d(n) 2 N/2 How to derive H(ej) from h(n)?
 = h(N-n-1) ① 时域: ② 频域: ③ 零点: 成倒数、共轭对出现. 重点掌握. h(n) 奇数N. () = -(N-1)/2. () a(n) 1) 2 2 (N-1)/2. 偶数N. h(n) 2) -(N-1) b(n) 2 N/2. 线性相位 FIR 数字滤波器特点. h(n) = -h(N-n-1) — H 为符幅频响(实) — h(n) 中心偶对称:L = 0. — h(n) 中心奇对称:L = 1. h(n) 奇数N. () = /2-(N-1)/2. A(), B(), C(), D() () 3) c(n) 2 /2. 2 (N-1)/2. 偶数N. h(n) -(N-3/2) 4) d(n) 2 N/2. How to derive H(ej) from h(n)")
94
IIR-DF —〉FIR-DF ? IIR FIR 2k/N strategy 从理想频率响应(低通、带通、高通及
H(ej) H(ej) IIR FIR 2k/N strategy 从理想频率响应(低通、带通、高通及 带阻)出发,通过在时 / 频域的合理舍 弃,将理想系统由非因果变为因果!! sampling (frequency) n h(n) n h(n) 数字 模拟 windowing (temporal)
 H(ej) IIR. FIR. 2k/N. strategy. 从理想频率响应(低通、带通、高通及. 带阻)出发,通过在时 / 频域的合理舍. 弃,将理想系统由非因果变为因果!! sampling (frequency) n. h(n) n. h(n) 数字. 模拟. windowing (temporal)")
95
5.5.2、FIR数字滤波器的设计(窗函数) 窗函数方法: 在满足线性相位响应前提下,在时域舍弃一些不可实现的要求
h(n)为奇点数中心偶对称 需要掌握下述两种方法 窗函数方法: 在满足线性相位响应前提下,在时域舍弃一些不可实现的要求 频率采样方法: Frequency-Sampling Method 窗函数方法: Windowing Method 频率采样方法: Frequency-Sampling Method
为奇点数中心偶对称. 需要掌握下述两种方法. 窗函数方法: 在满足线性相位响应前提下,在时域舍弃一些不可实现的要求. 频率采样方法: Frequency-Sampling Method. 窗函数方法: Windowing Method. 频率采样方法: Frequency-Sampling Method.")
96
合理舍弃: 有限长(N) 因果(向右平移) 中心对称 实际幅频响应 p 2 - p n n N = 21
10 20 n N = 21 N 为奇数,向右平移 (N - 1)/2 点 必要时可加窗 中心偶对称(第一种线性相响情形) EXAMPLE:截止频率为p的线性相位N阶低通滤波器
/2 点. 必要时可加窗. 中心偶对称(第一种线性相响情形) EXAMPLE:截止频率为p的线性相位N阶低通滤波器.")
97
窗函数FIR数字滤波器设计方法步骤 步骤一:根据给定指标确定理想低通数字滤波器的截止频率,以及相应的 理想频率响应 Hd(ej),其相位响应为零; 步骤二:根据下式计算理想低通系统的单位脉冲响应序列 hd(n): 步骤三:确定滤波器阶数 N,将 hd(n) 向右平移 (N - 1)/2,加窗得到 h(n): 这样,实际频率响应为 步骤四:检验结果,如果不满足指标要求,则返回步骤三,重新选择窗长 或窗形进行设计,直到满足要求为止
 向右平移 (N - 1)/2,加窗得到 h(n): 这样,实际频率响应为. 步骤四:检验结果,如果不满足指标要求,则返回步骤三,重新选择窗长 或窗形进行设计,直到满足要求为止.")
98
窗函数FIR数字滤波器设计方法步骤 关于步骤一中预期频率响应设定的两点说明:
相位响应也可设为-(N-1)/2,而非零相位响应,这样即无需步骤三中 的平移操作,直接加窗即可 也可以提一个更合理的期望响应,但可能计算逆傅氏变换较复杂,可 用 FFT 近似计算
/2,而非零相位响应,这样即无需步骤三中. 的平移操作,直接加窗即可. 也可以提一个更合理的期望响应,但可能计算逆傅氏变换较复杂,可. 用 FFT 近似计算.")
99
Hd(ej) p 2
 p 2 ")
100
x(n) z-1 z-1 z-1 z-1 z-1 z-1 h(0) h(1) h(2) h(3) y(n)
 z-1 z-1 z-1 z-1 z-1 z-1 h(0) h(1) h(2) h(3) y(n)")
101
线性相位FIR低通滤波器的设计 例:设计一个线性相位FIR低通滤波器,满足 下列条件:抽样频率为15KHz;通带截止频率
为1.5KHz;阻带起始频率为3KHz;阻带衰减 不小于50dB,幅度特性如右图所示。 |H(ej)| -3 解:1)明确通带、阻带增益要求: -50dB p c s 2)根据过渡带设定截止频率 c,由此确定 Hd(ej) Hd(ej) - -c c
| -3. 解:1)明确通带、阻带增益要求: -50dB. p. c. s. 2)根据过渡带设定截止频率 c,由此确定 Hd(ej) Hd(ej) - -c. c. ")
102
线性相位FIR低通滤波器的设计 3)据过渡带宽要求确定阶数 N(海明窗: = 6.6/N ) 4)求 hd(n)
0.3 0.2 0.1 -0.1 -20 -15 -10 -5 5 10 15 20 25 30 35 5)据阻带衰减要求选择窗函数:由 s = 50dB,确定海明窗(-53dB)
据阻带衰减要求选择窗函数:由 s = 50dB,确定海明窗(-53dB)")
103
线性相位FIR低通滤波器的设计 6)确定 FIR 滤波器的单位抽样响应 h(n),其中 = (N - 1)/2
7)求 H(ej),并检验性能是否满足预定指标。若不满足,则改变 N 或窗形状重新设计 h(n) 0.3 Rectangular Rectangular 0.25 Hamming Hamming -21 0.2 -40 0.15 -50 0.1 0.05 -80 -100 |H(ej)| -0.05 -120 -0.1 5 10 16 20 25 30 -140 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
求 H(ej),并检验性能是否满足预定指标。若不满足,则改变 N 或窗形状重新设计. h(n) 0.3. Rectangular. Rectangular Hamming. Hamming |H(ej)|")
104
高/带通、带阻滤波器的设计 Hd(ej) Hd(ej) Hd(ej) Hd(ej)
带通=低通-低通 高通=全通-低通 带阻=低通+高通

105
线性相位FIR高通滤波器的设计公式 — 高通: Hd(ej) p
 p ")
106
线性相位FIR高通滤波器的设计公式 h(n) |H(ej)| n
 |H(ej)| n")
107
线性相位FIR带通滤波器的设计公式 — 带通: Hd(ej) 1 2
 1 2 ")
108
线性相位FIR带通滤波器的设计公式 n |H(ej)| h(n)
| h(n)")
109
线性相位FIR带阻滤波器的设计公式 — 带阻: Hd(ej) 1 2
 1 2")
110
线性相位FIR带阻滤波器的设计公式 n |H(ej)| h(n)
| h(n)")
111
Hd(ej) p
 p ")
112
x(n) z-1 z-1 z-1 z-1 z-1 z-1 h(0) h(1) h(2) h(3) y(n)
 z-1 z-1 z-1 z-1 z-1 z-1 h(0) h(1) h(2) h(3) y(n)")
113
5.5.3、FIR数字滤波器的设计(频率采样) 窗函数方法: Windowing Method
频率采样方法:在满足线性相位响应前提下,在频域舍弃一些不可实现的要求 窗函数方法: Windowing Method 频率采样方法: Frequency-Sampling Method

114
5.5.3、FIR数字滤波器的设计(频率采样) 窗函数方法是一种时域方法,它从预期频率特性出发,用该特性的付氏反变换作为滤波器系数。由于要使它实现,并改善有关特性而加窗截断,使实际滤波器的频率响应偏离理想值,产生了通带波纹、阻带衰减和过渡带; 反之,也可以先从频域出发,修改和舍弃一些预期频率特性中不可能实现的因素和指标,使得滤波器的实现成为可能(通、阻带允许波动,设置过渡带),如只选取理想频率响应(周期连续)的一些离散值,再通过内插得到实际可实现的频率响应(如果在单位圆上等间距采样,则此时从时域上看,滤波器的脉冲响应是理想值的周期延拓)
,如只选取理想频率响应(周期连续)的一些离散值,再通过内插得到实际可实现的频率响应(如果在单位圆上等间距采样,则此时从时域上看,滤波器的脉冲响应是理想值的周期延拓)")
115
虽然 FIR 数字滤波器的频率响应不能任意设定(有时物理不可实现),但一些特殊频点 优点:频域直接设计:适合于窄带滤波器的设计;
上的响应却可精确控制(根据频率采样定理、DFT与DTFT之间的关系); 优点:频域直接设计:适合于窄带滤波器的设计; 缺点:抽样频率只能是/N的整偶(或奇)数倍,且截止频率不能任意取值(采样点 可能无法与之重合)。 20
; 优点:频域直接设计:适合于窄带滤波器的设计; 缺点:抽样频率只能是/N的整偶(或奇)数倍,且截止频率不能任意取值(采样点. 可能无法与之重合)。 20.")
116
① 两种抽样方法 一型 二型 jIm[z] jIm[z] N = 8(偶数) N = 8(偶数) Re[z] Re[z] -1 -1 1 1
It may be closer to a certain edge frequency jIm[z] jIm[z] N = 9(奇数) N = 9(奇数) Re[z] Re[z] -1 1 -1 1 一型 二型
![① 两种抽样方法 一型 二型 jIm[z] jIm[z] N = 8(偶数) N = 8(偶数) Re[z] Re[z]](http://slidesplayer.com/slide/14664814/90/images/116/%E2%91%A0+%E4%B8%A4%E7%A7%8D%E6%8A%BD%E6%A0%B7%E6%96%B9%E6%B3%95+%E4%B8%80%E5%9E%8B+%E4%BA%8C%E5%9E%8B+jIm%5Bz%5D+jIm%5Bz%5D+N+%3D+8%EF%BC%88%E5%81%B6%E6%95%B0%EF%BC%89+N+%3D+8%EF%BC%88%E5%81%B6%E6%95%B0%EF%BC%89+Re%5Bz%5D+Re%5Bz%5D.jpg "It may be closer to a. certain edge frequency. jIm[z] jIm[z] N = 9(奇数) N = 9(奇数) Re[z] Re[z] 一型. 二型.")
117
② 抽样值确定 若希望把预期频率特性的付氏反变换作为滤波器系数,则应满 足下面几个条件:
(1)预期频率特性的取样点数应等于滤波器阶数 N,并在单 位圆上等间隔分布; (2)为保证滤波器系数为实数,单位抽样序列应为实序列, 取样频率特性应具有圆周共轭对称性; (3)为使频率特性具有线性相位,其幅度特性和付氏反变换 之序列应为中心对称或中心反对称结构
预期频率特性的取样点数应等于滤波器阶数 N,并在单. 位圆上等间隔分布; (2)为保证滤波器系数为实数,单位抽样序列应为实序列, 取样频率特性应具有圆周共轭对称性; (3)为使频率特性具有线性相位,其幅度特性和付氏反变换. 之序列应为中心对称或中心反对称结构.")
118
② 抽样值确定 只要求掌握: 第一种线性相位情形:h(n) 为中心偶对称实序列,阶数 N 为奇数 第一种采样方式: 频率采样符幅应满足条件:
频率采样相位应满足条件: N为奇数

119
奇数点中心偶对称单位脉冲响应、第一种采样方式:
③ 系统单位脉冲响应、传函、频响 奇数点中心偶对称单位脉冲响应、第一种采样方式: (FS1)
")
120
奇数点中心偶对称单位脉冲响应、第一种采样方式:
③ 系统单位脉冲响应、传函、频响 奇数点中心偶对称单位脉冲响应、第一种采样方式: (FS1) Windowing method (FS2) Sampling method
 Windowing method. (FS2) Sampling method.")
122
奇数点中心偶对称单位脉冲响应、第一种采样方式:
③ 系统单位脉冲响应、传函、频响 奇数点中心偶对称单位脉冲响应、第一种采样方式: (FS1) Windowing method (FS2) Sampling method
 Windowing method. (FS2) Sampling method.")
123
奇数点中心偶对称单位脉冲响应、第一种采样方式:
③ 系统单位脉冲响应、传函、频响 奇数点中心偶对称单位脉冲响应、第一种采样方式: (FS1) Windowing method (FS2) Sampling method z = ej Windowing method (FS3) Sampling method
 Windowing method. (FS2) Sampling method. z = ej Windowing method. (FS3) Sampling method.")
124
注

125
奇数点中心偶对称单位脉冲响应、第一种采样方式:
③ 系统单位脉冲响应、传函、频响 奇数点中心偶对称单位脉冲响应、第一种采样方式: (FS1) Windowing method (FS2) Sampling method Windowing method (FS3) Sampling method ﹡ 教材(王世一)公式5-239有误
 Windowing method. (FS2) Sampling method. Windowing method. (FS3) Sampling method. ﹡ 教材(王世一)公式5-239有误.")
126
频率采样FIR-DF设计方法步骤 确定滤波器的技术指标,及预期频率响应(简单起见,可从理想 选频特性开始) 选择频率采样类型:
类型 I:kFs/N 类型 II:(k + ½)Fs/N 计算所需频率采样点数 N 及对应的频域采样值 H(k),确定过渡带 中频率采样点数 M 以及对应的幅度 利用公式(FS1)~(FS3)计算滤波器参数 检验结果是否满足指标,如果不满足,返回步骤二或三重新设计
Fs/N. 计算所需频率采样点数 N 及对应的频域采样值 H(k),确定过渡带 中频率采样点数 M 以及对应的幅度. 利用公式(FS1)~(FS3)计算滤波器参数. 检验结果是否满足指标,如果不满足,返回步骤二或三重新设计.")
127
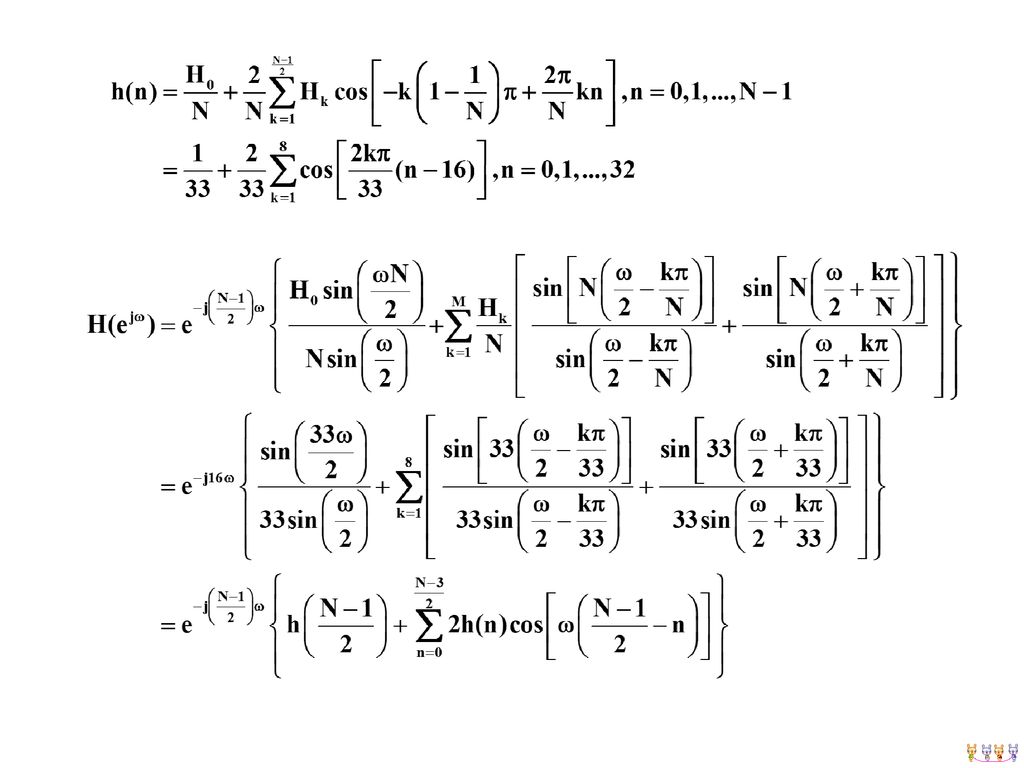
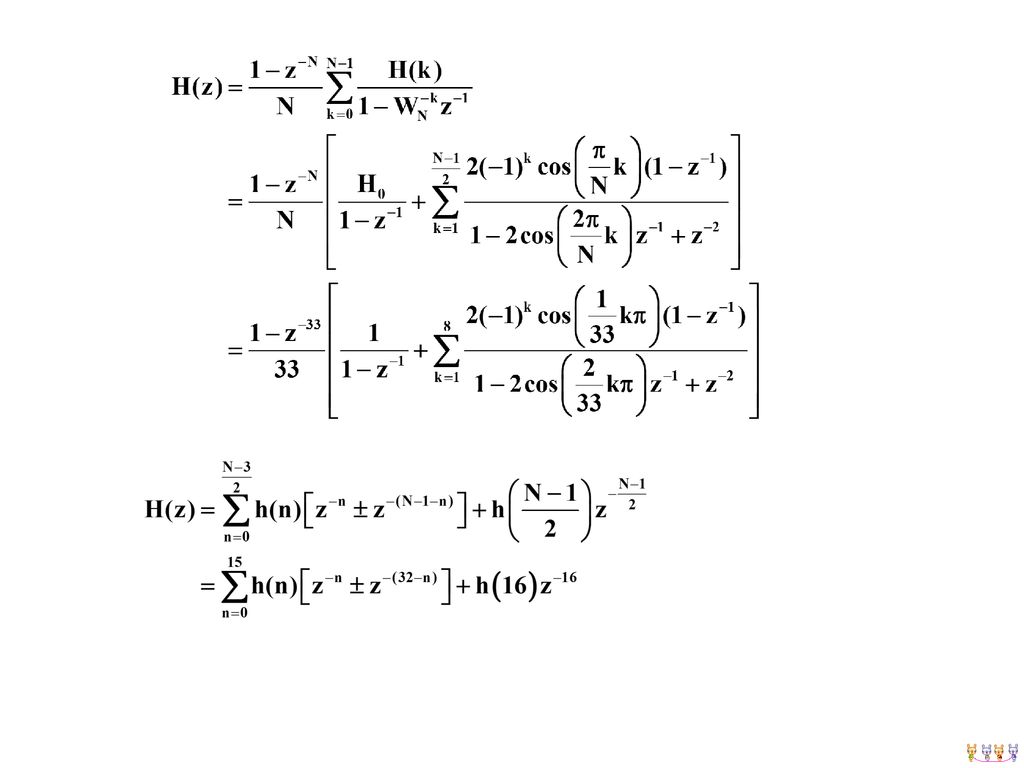
例题:利用第一种频率抽样法设计一个频率特性为矩形的理想低通滤波器,截止频率为 0
例题:利用第一种频率抽样法设计一个频率特性为矩形的理想低通滤波器,截止频率为 0.5,抽样点数为 N = 33,要求滤波器具有线性相位频率响应,并写出H(k),h(n),H(ej) 和 H(z) 解: 按第一种频率抽样方式,N = 33,得抽样点: ,其中 0.5 1.5 2 ω k 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 an example 8.25 16.5 24.75
,h(n),H(ej) 和 H(z) 解: 按第一种频率抽样方式,N = 33,得抽样点: ,其中. 0.5 1.5 2 ω. k an example")
130
|H(k)| H9 = 0.5 H24 = 0.5 k w 1.2 |H(e )| |H(k)| 1 0.8 )| & |H(k)| 0.6
j w )| |H(k)| 1 0.8 )| & |H(k)| 0.6 w j |H(e 0.4 0.2 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 w (/)
| |H(k)| )| & |H(k)| 0.6. w. j. |H(e w. (/)")
131
> -20dB 0.06 增加一点过渡 采样点: H9 = H24 = 0.5 w 20 H9 = 0 H9 = 0.5 -20
> -20dB -20 )|/dB w j -40 20lg|H(e -60 -80 0.06 增加一点过渡 采样点: H9 = H24 = 0.5 -100 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 w (/)
|/dB. w. j lg|H(e 0.06 增加一点过渡. 采样点: H9 = H24 = w. (/)")
132
0.6 0.5 0.4 0.3 h(n) 0.2 0.1 -0.1 -0.2 5 10 15 20 25 30 32 n
 n")
133
A “short” review (sorry again!)
Two degrees & three bridges:二度三桥 Divide & conquer:降维分治 Reasonable compromise:合理舍弃 Hidden periodicity:周期本质 第3章要求: 熟练计算线性卷积、周期卷积及圆 周卷积,弄清三者之间的关系 熟练计算DFT,弄清DFT与FT、ZT 及DTFT之间的关系 * 采样定理(时、频) * 连续信号 采样信号 数字序列 * 线性卷积 周期卷积 圆周卷积 * DTFT DFS DFT FT ZT 第4章要求: 掌握按时间和频率抽取 基2、分裂基“L”蝶形推导 熟练画出三种算法实现流图 * 按时间、频率抽取基2算法;混合基;分裂基;(线性调频z变换) * 巴特沃斯模拟逼近 脉冲响应不变(折叠)/双线性变换数字化(变形) 数模映射不同 * 窗函数方法(时域截断);频率采样方法(频域采样) 第5章要求: IIR巴特沃思数字低通滤波器设计: 脉冲响应不变、双线性变换 FIR线性相位响应数字滤波器设计: 时域平移截断、频域均匀采样 * 圆周卷积;DFT ;DF的频率响应 谢谢大家的配合和支持!
 * 连续信号 采样信号 数字序列. * 线性卷积 周期卷积 圆周卷积. * DTFT DFS DFT. FT. ZT. 第4章要求: 掌握按时间和频率抽取. 基2、分裂基 L 蝶形推导. 熟练画出三种算法实现流图. * 按时间、频率抽取基2算法;混合基;分裂基;(线性调频z变换) * 巴特沃斯模拟逼近 脉冲响应不变(折叠)/双线性变换数字化(变形) 数模映射不同. * 窗函数方法(时域截断);频率采样方法(频域采样) 第5章要求: IIR巴特沃思数字低通滤波器设计: 脉冲响应不变、双线性变换. FIR线性相位响应数字滤波器设计: 时域平移截断、频域均匀采样. * 圆周卷积;DFT ;DF的频率响应. 谢谢大家的配合和支持!")
134
Q & A





 :連續時間 信號以函數 x(t) 表示之,其中 t 是連續時間變數 。 離散時間信號 (discrete-time signal) :離散時間信 號只定義在離散的時間點上,一般以離散時間變數.>")
 Analog.>")









数字滤波器 无限冲激响应(IIR)数字滤波器 快速傅立叶变换(FFT) 第8章 数字信号处理典型算法程序设计>")





滤波器设计>")