Download presentation
Presentation is loading. Please wait.

1
第2章 VCD机芯及解码电路的原理与维修 本章要点 激光头的组成、原理及维修; 飞利浦机芯和索尼机芯的结构、工作过程及机芯电路原理; 机芯及电路故障的分析与维修; MPEG1解码器的组成及常用MPEG1解码器; 音、视频处理电路原理及维修; 系统控制及显示电路原理; 电源电路组成及原理

2
2.1 激光头的组成及工作原理 激光头由激光发射系统、激光传播系统和激光接收系统组成。激光发射系统主要由激光二极管组成。普通型激光二极管主要由半导体激光器(LD)、光电二极管(PD)、散热器、管帽、管座、管脚等构成,如图2.1所示。激光器产生的激光波长一般为780nm,从发射窗射出。激光的波长越短,效果越好。激光器产生激光时会发热,散热器起散热作用。激光器有负温度特性,它产生的激光的功率随温度而变化。光电二极管对发射的激光功率进行检测,将检测到的信号送到激光功率自动控制(APC)电路,以控制激光二极管的驱动电流,从而控制激光发射功率,使它保持恒定。
、光电二极管(PD)、散热器、管帽、管座、管脚等构成,如图2.1所示。激光器产生的激光波长一般为780nm,从发射窗射出。激光的波长越短,效果越好。激光器产生激光时会发热,散热器起散热作用。激光器有负温度特性,它产生的激光的功率随温度而变化。光电二极管对发射的激光功率进行检测,将检测到的信号送到激光功率自动控制(APC)电路,以控制激光二极管的驱动电流,从而控制激光发射功率,使它保持恒定。")
3
图2.1 普通型激光二极管的内部结构。 普通激光二极管有3个引出脚:激光器引出脚AL、光电二极管引出脚AP及公共引脚K,其封装形式有M型、P型、N型3种,如图2.2所示 激光传播系统主要由镜片组和光栅组成。激光接收系统由光敏接收器完成 光电转换任务,常用的有6分光敏接收器与5分光敏接收器,如图2.3所示

4
图2.2 封装形式

5
2.3 光敏接收器

6
光敏接收器常用衍射光栅型激光枪,如索尼CDM14机芯的激光头中,5分光敏接收器一般用于全息照相复合型激光管,如飞利浦CDM12机芯与夏普机芯。 6分光敏接收器中央的4只光敏管(A, B, C, D)用于接收主光束,进行光电转换,产生聚焦电信号与RF电信号;两边缘光敏管E, F用于接收辅助光,进行光电转换,产生循迹电信号。 5分光敏接收器中央的3只光敏管D2, D3, D4用于接收主光束,进行光电转换,产生聚焦电信号和RF信号;两边缘光敏管D1, D5用于接收辅助光束进行光电转换,产生循迹信号。
用于接收主光束,进行光电转换,产生聚焦电信号与RF电信号;两边缘光敏管E, F用于接收辅助光,进行光电转换,产生循迹电信号。 5分光敏接收器中央的3只光敏管D2, D3, D4用于接收主光束,进行光电转换,产生聚焦电信号和RF信号;两边缘光敏管D1, D5用于接收辅助光束进行光电转换,产生循迹信号。")
7
2.2 激光功率自动控制电路(APC电路) 激光头射出来的激光功率一般约5mW,但光输出的功率有负温度特性,故必须对激光发射管发射驱动电路的电流进行自动控制(APC)。驱动电流大,激光功率强;驱动电流小,激光功率弱。驱动电流一般在60mA左右,激光头就能正常工作。 国产VCD机中,激光功率自动控制电路常用的有两种,一种是由分离元件构成的,另一种是集成在伺服集成电路之中,其控制原理基本相同。
。驱动电流大,激光功率强;驱动电流小,激光功率弱。驱动电流一般在60mA左右,激光头就能正常工作。 国产VCD机中,激光功率自动控制电路常用的有两种,一种是由分离元件构成的,另一种是集成在伺服集成电路之中,其控制原理基本相同。")
8
图2.4所示是索尼机芯常用APC电路。LD的驱动电流由Q提供,Q输出的电流大小受APC电路控制。APC电路实际是一个运算放大器,集成在伺服集成电路之中。激光功率检测二极管PD用于检测LD发光强弱,并将强弱信号送入APC电路,经运算放大后输出控制电压去调节Q的驱动电流。电位器VR用于设置PD的偏置电压,通过调整VR可设置LD发射的初始激光功率。VR安装在机芯上,当因光头老化而读盘困难或不能读盘时,可适当调整VR来提高LD初始发射激光功率,从而短时间增强读盘能力。

9
图2.4 索尼机芯APC电路

10
图2.5是飞利浦机芯采用分离元件构成的APC电路。T1为驱动管,为LD提供驱动电流,T2, T3构成APC电路,其控制原理与上述基本相同,读者可自行分析。图2.5 飞利浦机芯APC电路

11
2.3 激光头的维修 激光头内的激光二极管长期工作后易老化,表现为光输出功率减小,激光强度减弱,识读目录时间变长甚至识读不出来,旧碟片不能重放。对于初期老化的激光头,可以通过调整激光电流调整电位器,适当增大电流,保持光输出功率的方法进行补偿。如盲目调整激光头中激光电流调整电位器,当电流增大到150mA时,将烧坏激光二极管。 判别激光二极管是否损坏的方法有以下几种: (1)在聚焦期间,将激光功率计探头直接对准激光头物镜进行检测。若激光功率计读数小于0.1mW,RF信号输出电压很低,则激光二极管老化或损坏。
在聚焦期间,将激光功率计探头直接对准激光头物镜进行检测。若激光功率计读数小于0.1mW,RF信号输出电压很低,则激光二极管老化或损坏。")
12
(2)在聚焦期间,用数字万用表监测激光二极管驱动电路中负载电阻的压降(只适用于CDM14机芯),估算激光二极管的电流。当电流超过100mA,且调节激光功率电位器电流不变化时,可判定激光二极管已损坏。若电流剧增且不可控制,说明谐振腔损坏。 (3)不装光盘,拆下机壳上盖,操作托盘闭键,在物镜聚焦期间,从侧面观察物镜是否出现暗红色的光点,并用万用表测量APC电路激光功率检测光敏管(PD)的电压,一般约1V,低于0.7V,说明激光二极管老化,0V表示损坏。 (4)拆下激光二极管,测量其电阻,正常时反向电阻为无穷大,正向电阻为20k~36k。若正向电阻大于50k,则性能下降;大于90k时,二极管已不能使用。这一方法不仅可用于判别激光二极管的好坏,还可用于选择激光二极管。
不装光盘,拆下机壳上盖,操作托盘闭键,在物镜聚焦期间,从侧面观察物镜是否出现暗红色的光点,并用万用表测量APC电路激光功率检测光敏管(PD)的电压,一般约1V,低于0.7V,说明激光二极管老化,0V表示损坏。 (4)拆下激光二极管,测量其电阻,正常时反向电阻为无穷大,正向电阻为20k~36k。若正向电阻大于50k,则性能下降;大于90k时,二极管已不能使用。这一方法不仅可用于判别激光二极管的好坏,还可用于选择激光二极管。")
13
2.4 飞利浦机芯组成及原理 机芯是VCD机的关键部件,是集光学、伺服控制技术和精密机械于一体的部件,用于快速、准确地读取光盘信息。采用飞利浦机芯的有万利达、爱多、先科、厦新、锦电等品牌VCD机。所采用的飞利浦CDM12机芯抗震能力强,在90°范围内倾斜皆可正常播放。 机芯组成 CDM12机芯主要由托盘进出机构、夹持机构、进给机构、光盘旋转机构和物镜机构组成。其中进给机构、光盘旋转机构和激光头安装在激光头组件上。激光头组件通过销钉嵌在升降斜槽内,和托盘进出机构、光盘加/卸载机构、夹持机构共同安装在机芯支架上,如图2.6所示。

14
图2.6 CDM12机芯结构

15
2.4.2 托盘进出机构 托盘进出机构由托盘、驱动齿轮、皮带轮、加载电机、托盘进出检测柱和检测开关等组成,如图2.7所示。
在托盘左边内侧有一根齿条,并与驱动齿轮啮合,如图2.8所示。驱动齿轮通过齿条带动托盘水平移动。托盘右边内侧有一个托盘进出检测板,在其中部有两个倾斜面。托盘进出时,该倾斜面碰压检测柱,使开关断开,此开关信息送到微处理器后由微处理器进行相应的控制

16
图2.7 托盘进出机构的组成

17
图2.8 托盘结构

18
托盘进出原理如图2.9和图2.10所示,当微处理器收到“CLOSE”指令时,指挥电机驱动电路工作,使加载电机逆时针转动,通过皮带轮使驱动齿轮带动托盘齿条移动,托盘便由机外向机内水平移动,如图2.11所示。移动过程中,检测开关K1在检测板和检测柱的机械碰撞作用下闭合一次后又断开,将形成的脉冲信号送到微处理器,由微处理器发出电机刹车指令,使托盘到达机内预定位置后停下。

19
图2.9 托盘进出原理

20
图2.10 光盘装卸控制电路

21
图2.11 托盘进出检测

22
微处理器收到“OPEN”指令时,指挥电机驱动电路工作并使加载电机顺时针转动,通过同样的机械装置带动托盘由机内向机外水平移动。在激光头升降架下降到位,光盘落入托盘后,托盘便向机外移动。检测开关K1被碰压闭合一次后再断开,形成的脉冲信号送到微处理器,微处理器发出刹车指令,使电机在托盘外移到位后停转。

23
2.4.3 光盘装卸机构 光盘装卸机构主要由驱动齿轮、齿条、升推杆、降推板、提升夹、挡销
光盘装卸机构 光盘装卸机构主要由驱动齿轮、齿条、升推杆、降推板、提升夹、挡销 与机芯支架上的左右侧板等组成,如图2.12所示。其中升推杆在托盘左 边齿条的末端,与托盘齿条连成一体;降推板在托盘右边后部,托盘向外移动时,推动激光头升降架下降;U形提升夹在激光头升降架后部,与激光头升降架连成一体,与升推杆配合,使激光头升降架上升。

24
图2.12 光盘装卸机构

25
光盘加载原理如图2.12(a)所示。托盘将光盘送到机内预定位置后,加载电机继续转动,带动托盘向机内移动,托盘左边尾部的升推杆落入提升夹内的U形槽中,推动激光头升降架沿机芯尾部A倾斜面滑动而上升。同时升降架上的4个升降销沿4个侧板上的倾斜槽沿底部移到高部,将激光头升降架提升;旋转盘随之升高,将光盘托起(此时光盘离开托盘)抵至夹持器,光盘就被夹持器和旋转盘稳固夹紧,激光头组件也随之升起。此时微处理器根据前述托盘到位检测信号发出刹车指令,加载电机停转,加载完成
所示。托盘将光盘送到机内预定位置后,加载电机继续转动,带动托盘向机内移动,托盘左边尾部的升推杆落入提升夹内的U形槽中,推动激光头升降架沿机芯尾部A倾斜面滑动而上升。同时升降架上的4个升降销沿4个侧板上的倾斜槽沿底部移到高部,将激光头升降架提升;旋转盘随之升高,将光盘托起(此时光盘离开托盘)抵至夹持器,光盘就被夹持器和旋转盘稳固夹紧,激光头组件也随之升起。此时微处理器根据前述托盘到位检测信号发出刹车指令,加载电机停转,加载完成")
26
光盘的卸载原理如图2.12(b)所示。托盘向外移动初期,托盘左边的升推杆离开提升夹的U形槽,托盘右边的降推板接触激光头升降架尾部,随托盘继续移动,推动激光头升降架沿机芯尾部A倾斜面向外滑动,4个升降销也沿倾斜槽从高部滑动到底部,激光头升降架随之下降,使旋转盘上的光盘落入托盘。激光头升降架上的旋转盘与激光头组件也下降,远离托盘平面,由托盘进出机构将托盘送出机外。
所示。托盘向外移动初期,托盘左边的升推杆离开提升夹的U形槽,托盘右边的降推板接触激光头升降架尾部,随托盘继续移动,推动激光头升降架沿机芯尾部A倾斜面向外滑动,4个升降销也沿倾斜槽从高部滑动到底部,激光头升降架随之下降,使旋转盘上的光盘落入托盘。激光头升降架上的旋转盘与激光头组件也下降,远离托盘平面,由托盘进出机构将托盘送出机外。")
27
2.4.4 夹持器 2.4.5 光盘旋转机构 夹持器与旋转盘配合,将光盘固定在旋转盘上,便于光盘高速、稳定地
夹持器 夹持器与旋转盘配合,将光盘固定在旋转盘上,便于光盘高速、稳定地 旋转。它由磁环、夹持套、卡圈等组成,利用磁环的磁性对铁质旋转盘的吸力将光盘夹在中间,如图2.13所 光盘旋转机构 光盘旋转机构安装在主轴电机的轴上,随激光头升降架而升降,重放时托起光盘随主轴电机高速、平稳地旋转。

28
图2.13 夹持器

29
激光头进给机构 激光头进给机构使激光头组件水平移动,以读取光盘从内圈到外圈的信息,主要由进给电机驱动齿轮、齿条、滑动杆等构成,如图2.14所示。

30
进给电机轴上装有蜗杆,与齿轮组啮合,可传动激光头组件,使激光头在滑动杆上来回移动。 装盘结束时,进给机构上升到位,进给电机转动,带动激光头组件朝旋转盘方向移动,并碰撞进给位置检测开关使其闭合。微处理器根据该信号控制进给电机反转,带动激光头组件外移至光盘零轨位置,然后进给电机刹车而停转。每次电源接通后,微处理器总要检测激光头组件位置,并使其碰撞进给位置检测开关后回到零轨位置。 在搜寻到有碟片并要播放时,进给伺服控制电路产生进给控制电压,进给电机便匀速地带动激光头组件沿滑动杆由光盘内侧向外侧滑动,直到读完光盘内容。当微处理器收到激光头识读完光盘信息或“OPEN”操作指令后,立即通过驱动进给电机使激光头组件迅速返回到初始位置,然后进给电机停止转动。

31
物镜机构 物镜机构(俗称激光头)用于读取光盘信息,主要由聚焦线圈、循迹线圈、聚焦磁铁、循迹磁铁和物镜等构成。物镜卡牢在绕有聚焦线圈与循迹线圈的塑料骨架中央,用4根弹性很强的金属线作为两线圈的引脚。 该机构利用电磁驱动原理,采用伺服控制技术,改变聚焦线圈中的电流以带动物镜上下移动,对激光束进行聚焦;驱动循迹线圈带动物镜水平微动,以校正聚焦的水平位置。该机构在伺服系统控制下始终使激光识读光点精确地投射在目标信轨的中心线上,以准确地读取光盘信息并送入电路处理。
用于读取光盘信息,主要由聚焦线圈、循迹线圈、聚焦磁铁、循迹磁铁和物镜等构成。物镜卡牢在绕有聚焦线圈与循迹线圈的塑料骨架中央,用4根弹性很强的金属线作为两线圈的引脚。 该机构利用电磁驱动原理,采用伺服控制技术,改变聚焦线圈中的电流以带动物镜上下移动,对激光束进行聚焦;驱动循迹线圈带动物镜水平微动,以校正聚焦的水平位置。该机构在伺服系统控制下始终使激光识读光点精确地投射在目标信轨的中心线上,以准确地读取光盘信息并送入电路处理。")
32
2.5 索尼机芯结构及工作原理 索尼机芯在国产VCD机中应用广泛,如新科、长虹等厂家均采用索尼CDM14型系列机芯。该机芯采用索尼公司制造的激光二极管和6分光敏接收器,以及光路镜片分离调整式的三束光激光头(如常见的KSS-213C激光头)。 该机芯基本组成如图2.15所示(与CDM12机芯类似),由托盘进出机构、光盘装卸机构、光盘旋转机构、夹持机构、激光头进给机构和物镜机构等组成。托盘进出机构、光盘装卸机构与夹持机构安装在塑料机座上;光盘旋转机构、进给机构和物镜机构安装在钢制芯座上,由后面的两个销钉通过螺钉压固在机座上;芯座嵌在升降凸轮槽内,随升降凸轮的转动而上下移动。
。 该机芯基本组成如图2.15所示(与CDM12机芯类似),由托盘进出机构、光盘装卸机构、光盘旋转机构、夹持机构、激光头进给机构和物镜机构等组成。托盘进出机构、光盘装卸机构与夹持机构安装在塑料机座上;光盘旋转机构、进给机构和物镜机构安装在钢制芯座上,由后面的两个销钉通过螺钉压固在机座上;芯座嵌在升降凸轮槽内,随升降凸轮的转动而上下移动。")
33
图2.15 CDM14型机芯的基本组成

34
托盘进出机构 托盘进出机构主要由托盘齿条、程序齿轮、中间轮、皮带轮、同步齿轮、进出检测开关K1、K2与加载电机等组成,如图2.16所示图2.16 托盘进出机构

35
托盘进出机构主要由电机带动齿轮组(由皮带轮、中间轮、程序齿轮及托盘齿条组成)转动,进而带动托盘水平移动,如图2
托盘进出机构主要由电机带动齿轮组(由皮带轮、中间轮、程序齿轮及托盘齿条组成)转动,进而带动托盘水平移动,如图2.17所示。当微处理器收到“CLOSE”指令后发出装盘指令,经加载电机驱动电路,驱动加载电机逆时针转动,经齿轮组带动托盘水平内移。当托盘进盒到位并将芯座上升到位时,程序齿轮上的塑料检测柱碰压进盒检测开关K2,使其闭合接通。闭合信号送入微处理器后,微处理器就控制加载电机刹车停转,托盘进盒完毕,如图2.18所示。
转动,进而带动托盘水平移动,如图2.17所示。当微处理器收到 CLOSE 指令后发出装盘指令,经加载电机驱动电路,驱动加载电机逆时针转动,经齿轮组带动托盘水平内移。当托盘进盒到位并将芯座上升到位时,程序齿轮上的塑料检测柱碰压进盒检测开关K2,使其闭合接通。闭合信号送入微处理器后,微处理器就控制加载电机刹车停转,托盘进盒完毕,如图2.18所示。")
36
图2.17 托盘进出机构传动原理

37
图2.18 托盘进工作原理

38
微处理器收到“OPEN”指令后,加载电机在CPU的控制下顺时针转动,通过齿轮组先使芯座下降到位,然后传动托盘水平外移。托盘出盒到位的同时,塑料检测柱旋转到检测开关K1处并碰压使其闭合。CPU收到K1闭合信号后发出制动指令,电机即刹车停转,如图2.19所示

39
图2.19 托盘出工作原理

40
光盘装卸机构 如图2.20所示,光盘装卸机构主要由程序齿轮、升降凸轮、芯座等组成

41
光盘装卸原理如图2.21所示。装盘时,加载电机将托盘送到机内播放位置后,继续逆时针转动,通过程序齿轮内层的三个齿带动升降凸轮上的三个齿,使升降凸轮顺时针转动,升降凸轮内的倾斜槽带动其内的升降销沿倾斜条向上滑动到最高平台。与升降销相连的芯座随之上升,旋转盘上升将托盘中的光盘抬起并升到夹持器将光盘夹紧。此时检测开关K2被碰压闭合,电机刹车停转。

42
图2.21 光盘装卸原理

43
卸盘与装盘是相反的过程。托盘向外移动前,加载电机顺时针转动,通过传动机构使升降凸轮逆时针转动并下降,带动升降销下滑至底部。旋转盘随之降低的过程中将光盘送回托盘,旋转盘与激光头同时降低并远离托盘面,然后托盘水平外移,将光盘送出机外。

44
进给机构 用于将激光头组件沿径向移动的进给机构主要由进给齿轮、齿条、滑动杆和进给电机等组成,如图2.22所示。套在进给电机轴上的齿轮与中间齿轮啮合,中间齿轮又与激光头组件上的齿条啮合。激光头组件通过一根金属滑动杆固定在芯座上。进给电机转动,可带动激光头组件沿滑动杆水平移动。

45
图2.22 进给机构

46
进给机构传动原理如图2.23所示。装盘结束后,芯座、激光头等升起到位。微处理器控制进给电机反转,带动激光头沿光盘内径方向移动,直到光头组件碰压进给位置检测开关K3并使其闭合。K3闭合信息被CPU检测到后,CPU发出指令,使进给电机正转,带动激光头组件移至光盘零轨位置后进给电机停转,然后激光头对光盘进行聚焦访问并识读目录区信息。

47
图2.23 进给机构传动原理

48
激光头读盘时,在进给伺服电路控制下,进给电机匀速转动,使激光头读完整盘信息。CPU收到激光头识读完毕信息或“OPEN”信息后,控制进给电机高速反转,带动激光头组件快速回到初始位置,然后电机停转。
光盘旋转机构和光盘夹持器 光盘旋转机构由上旋转盘、压簧、旋转盘与锁紧片等构成。夹持器主要由磁环、夹持器、卡圈等组成。二者的工作原理与CDM12机芯相同,在此不再赘述。

49
2.6 VCD影碟机机芯电路 VCD机机芯电路有两大类:飞利浦机芯电路和索尼机芯电路,分别与对应的机芯配套使用,下面将分别介绍。
飞利浦数码机芯电路 飞利浦数码机芯电路的主要集成块如表2.1所示,其组成框图如图2.24所示。

50
表2.1 主要集成块及功能 编 号 IC型号 功 能 ICS1 TDA1300 RF信号处理 ICS2 OM5284 机芯微处理器
表2.1 主要集成块及功能 编 号 IC型号 功 能 ICS TDA RF信号处理 ICS OM 机芯微处理器 ICS SAA 数字信号处理和机芯伺服处理 ICS TDA7073AT 进给和主轴电机驱动 ICS TDA7073AT 聚焦和循迹线圈驱动

51
图2.24 组成方框图

52
激光头将从光盘拾取的信号送到ICS1,产生RF信号并送入ICS3,分别处理成聚焦、循迹、进给和主轴伺服控制信号并进行DSP处理(数字信号处理)。聚焦和循迹误差控制信号送到ICS5,经驱动放大后分别驱动聚焦线圈和循迹线圈,使物镜自动跟踪光盘轨迹;进给伺服控制信号送到ICS4,经驱动放大后驱动进给电机,带动激光头沿径向运动,对光盘轨迹进行扫描;主轴伺服控制信号送到ICS4,经驱动放大后驱动主轴电机带动光盘作恒线速度转动;DSP将RF信号处理成串行数据(DATA)信号、位时钟(SCLK)信号、左右声道时钟(WCLK)信号和C2PO指针(错误指示)信号并送入解码电路。
。聚焦和循迹误差控制信号送到ICS5,经驱动放大后分别驱动聚焦线圈和循迹线圈,使物镜自动跟踪光盘轨迹;进给伺服控制信号送到ICS4,经驱动放大后驱动进给电机,带动激光头沿径向运动,对光盘轨迹进行扫描;主轴伺服控制信号送到ICS4,经驱动放大后驱动主轴电机带动光盘作恒线速度转动;DSP将RF信号处理成串行数据(DATA)信号、位时钟(SCLK)信号、左右声道时钟(WCLK)信号和C2PO指针(错误指示)信号并送入解码电路。")
53
1. 数据通信电路 电源接通之后复位脉冲送到ICS2的④脚进行清零复位。 ICS2的14 、15 脚产生12MHz时钟信号;ICS3的21 、22 脚产生8.467MHz时钟信号,同时从24 脚输出16.9MHz时钟信号。 2. 托盘进/出控制电路 托盘进出控制电路如图2.25所示。

54
图2.25 托盘进/出控制电路

55
(1)托盘进。ICS2的⑤脚输出高电平。此高电平加至QS14、QS15并使其导通。QS15导通使QS10和QS13截止;QS14导通使QS12和QS11导通,电流从+5V→QS12→JSO3的③脚→电机的负端→电机正端→JSO3的④脚→QS11→地。加载电机得电反转,带动托盘进入机内。托盘到位后检测开关KS被碰压断开,QS16基极得电导通,ICS2的20 脚电平变为低电平,于是ICS2的⑤、⑦脚同时输出高电平脉冲使电机刹车停机,再同时变为低电平,托盘进盒到位完毕。 (2)托盘出。当ICS2接收到“OPEN”操作信号后,其⑦脚输出高电平卸载控制信号。此高电平使QS09导通,同时QS10和QS13也导通,电流从+5V→QS10→JS03的④脚→电机正端→电机负端→JS03的③脚→QS13→地。加载电机正转带动托盘向机外移动,到位时开关KS被碰压断开,QS16得电导通,ICS2的20 脚变为低电平后其⑤、⑦脚使电机刹车。托盘移出机外到位完毕。
托盘进。ICS2的⑤脚输出高电平。此高电平加至QS14、QS15并使其导通。QS15导通使QS10和QS13截止;QS14导通使QS12和QS11导通,电流从+5V→QS12→JSO3的③脚→电机的负端→电机正端→JSO3的④脚→QS11→地。加载电机得电反转,带动托盘进入机内。托盘到位后检测开关KS被碰压断开,QS16基极得电导通,ICS2的20 脚电平变为低电平,于是ICS2的⑤、⑦脚同时输出高电平脉冲使电机刹车停机,再同时变为低电平,托盘进盒到位完毕。 (2)托盘出。当ICS2接收到 OPEN 操作信号后,其⑦脚输出高电平卸载控制信号。此高电平使QS09导通,同时QS10和QS13也导通,电流从+5V→QS10→JS03的④脚→电机正端→电机负端→JS03的③脚→QS13→地。加载电机正转带动托盘向机外移动,到位时开关KS被碰压断开,QS16得电导通,ICS2的20 脚变为低电平后其⑤、⑦脚使电机刹车。托盘移出机外到位完毕。")
56
3. 伺服电路 (1)聚焦伺服电路。为了使激光头随时都能准确读取光盘信息,需引入聚焦伺服,让物镜跟踪光盘上下移动,其电路如图2.26所示。
聚焦伺服电路。为了使激光头随时都能准确读取光盘信息,需引入聚焦伺服,让物镜跟踪光盘上下移动,其电路如图2.26所示。")
57
图2.26 聚焦、循迹和进给伺服电路

58
飞利浦CDM12机芯的激光头发射出的3束激光(一条主光束和两条辅助光)经光盘反射回光头,其主光束被分裂成两束,分别照在5分检测器D2,D3和D4上。两束辅助光投射在D1,D5上,用于检测循迹状况。D2,D3上检测到的信号用于聚焦伺服,其聚焦伺服过程如下: 当发射的激光离焦时→D2,D3上接收的反射光不相等→聚焦误差信号D2-D3≠0→经ICS3(5AA7273)进行A/D转换并处理→ICS3的26 脚送出控制信号→经RS16,RS17,CS20和CS23低通滤波,产生聚焦伺服误差电压→送入ICS5的⑥脚并被放大为成比例的驱动电流→经ICS5的13 、16 脚送达聚焦线圈→聚焦线圈驱动物镜动作并使其紧盯盘面,直到新的聚焦使误差为零为止
经光盘反射回光头,其主光束被分裂成两束,分别照在5分检测器D2,D3和D4上。两束辅助光投射在D1,D5上,用于检测循迹状况。D2,D3上检测到的信号用于聚焦伺服,其聚焦伺服过程如下: 当发射的激光离焦时→D2,D3上接收的反射光不相等→聚焦误差信号D2-D3≠0→经ICS3(5AA7273)进行A/D转换并处理→ICS3的26 脚送出控制信号→经RS16,RS17,CS20和CS23低通滤波,产生聚焦伺服误差电压→送入ICS5的⑥脚并被放大为成比例的驱动电流→经ICS5的13 、16 脚送达聚焦线圈→聚焦线圈驱动物镜动作并使其紧盯盘面,直到新的聚焦使误差为零为止")
59
(2)循迹伺服电路。 当主光束位于光盘纹迹正中时,循迹检测光敏器D1,D5上的光通量相等,循迹误差信号为零,循迹线圈不作微动。但当主光束偏离光盘纹轨中心时,其自动控制过程如下: 主光束偏离信轨中心→光敏检测器D1,D5上光通量不相等→循迹误差信号D1-D5≠0→经ICS3处理后从其 27脚输出误差控制信号→经RS18,RS19,CS22,CS29低通滤波,产生循迹伺服电压→送入ICS5的②脚处理为成比例的驱动电流→从ICS5的9、12 脚送达循迹线圈→循迹线圈带动物镜水平微动→焦点移到纹轨中心→使误差信号为零。

60
(3)进给伺服电路。 循迹伺服电路只能带动物镜在小范围内移动(±0.3mm)跟踪信息纹轨中心,要带动物镜读完光盘所有信息纹轨,需要进给伺服电路,它能带动物镜在盘片有效工作区作径向移动(可移动35mm)。在进给伺服(跟踪粗伺服)和循迹伺服(跟踪精伺服)的配合下,物镜可准确跟踪信息纹轨中心并读出信息。 如前图所示,D1、D5的差值若不为零→经ICS3处理,从28 脚输出误差控制信号→经RS15,CS21,CS16低通滤波获得控制电压→此电压输入ICS4的⑥脚,并转变为相应方向和大小的驱动电流→经ICS4的9、12 脚加入进给电机→电机转动并带动物镜对光盘轨迹进行跟踪扫描。
跟踪信息纹轨中心,要带动物镜读完光盘所有信息纹轨,需要进给伺服电路,它能带动物镜在盘片有效工作区作径向移动(可移动35mm)。在进给伺服(跟踪粗伺服)和循迹伺服(跟踪精伺服)的配合下,物镜可准确跟踪信息纹轨中心并读出信息。 如前图所示,D1、D5的差值若不为零→经ICS3处理,从28 脚输出误差控制信号→经RS15,CS21,CS16低通滤波获得控制电压→此电压输入ICS4的⑥脚,并转变为相应方向和大小的驱动电流→经ICS4的9、12 脚加入进给电机→电机转动并带动物镜对光盘轨迹进行跟踪扫描。")
61
4. 主轴伺服电路 光盘在刻录的时候,是以恒定线速度(CLV)刻录信息坑点的(线速度为1.25m/s),激光头在读取光盘信息时,应该匀速读取坑点信息,但光盘各圈半径不同,要达到恒线速度旋转,主轴电机的转速应随光盘半径增大而变慢。读取光盘内圈时,主轴转动应快;读外圈时应转慢一点,始终保持光头与被读取信轨的相对速度为1.25m/s。 主轴伺服的原理是先从RF信号中取出位脉冲,正常时位脉冲的频率为7.35kHz,但当主轴电机旋转过快或过慢时,从RF信号中取出的位脉冲频率将大于或小于7.35kHz。此时读出的位脉冲频率与机内标准的
刻录信息坑点的(线速度为1.25m/s),激光头在读取光盘信息时,应该匀速读取坑点信息,但光盘各圈半径不同,要达到恒线速度旋转,主轴电机的转速应随光盘半径增大而变慢。读取光盘内圈时,主轴转动应快;读外圈时应转慢一点,始终保持光头与被读取信轨的相对速度为1.25m/s。 主轴伺服的原理是先从RF信号中取出位脉冲,正常时位脉冲的频率为7.35kHz,但当主轴电机旋转过快或过慢时,从RF信号中取出的位脉冲频率将大于或小于7.35kHz。此时读出的位脉冲频率与机内标准的.")
62
7.35kHz信号相比较,产生伺服误差信号,经主轴伺服电路控制主轴电机的旋转速度达到伺服目的,避免因此而引起的图像抖动和彩色闪烁。 主轴伺服电路如图2.27所示。RF信号经ICS1的⑨脚输入ICS3的15 脚并在内部进行比较,产生主轴速度伺服控制电压。此电压经ICS3的 33,34 脚输出,经低通滤波后输入ICS4的①,②脚进行驱动放大,经ICS4的 13, 16脚送入主轴电机,控制主轴电机转速。

63
图2.27 主轴伺服电路

64
2.6.2 索尼数码机芯电路 索尼数码机芯电路的主要集成块如表2.2所示,其组成框图如图2.28所示 表2.2 主要集成块及其功能 编 号
索尼数码机芯电路 索尼数码机芯电路的主要集成块如表2.2所示,其组成框图如图2.28所示 表2.2 主要集成块及其功能 编 号 IC型号 功 能 D110 CXA1821M RF信号处理 D109 CXD2545Q 数字信号处理与数字伺服处理 D105 BA6392FP 聚焦、循迹、进给和主轴电机驱动电路 D111 BA6209A 加载电机驱动电路

65
图2.28 索尼数码平台机芯电路组成框图

66
从图2.28可知,激光头拾取信号经I/V(电流/电压)转换后送入D110,产生RF信号、循迹误差信号、聚焦误差信号、进给信号。这些信号送入D109进行数字处理后送入D105驱动放大,用以控制聚焦、循迹线圈、进给电机、主轴电机进行伺服。同时,D109输出的串行数据(DATA)、位时钟(BCK)、左右声道信号(LRCK)送入解码电路作进一步处理。 1. 数据通信电路 如图2.29所示,接通电源瞬间,复位脉冲对微处理器进行复位后,输出复位电平脉冲到达D109的81 脚对D109进行复位,复位后电路进入正常工作状态。

67
图2.29 复位时钟和数据通信电路

68
系统时钟由微处理器送入D109的 88脚,D109通过 86, 87, 88脚与外电路进行数据通信。D109工作所需的16
系统时钟由微处理器送入D109的 88脚,D109通过 86, 87, 88脚与外电路进行数据通信。D109工作所需的16.943MHz时钟信号由其62 脚输入 2. 托盘进出控制电路 与飞利浦机芯伺服电路不同,本机芯托盘进出控制电路直接由微处理器输出控制信号,经D111驱动,带动加载电机转动,实现托盘进/出控制,如图2.30所示。

69
图2.30 托盘进出控制电路

70
微处理器收到“CLOSE”信号后,从D111的③脚输入加载信号,驱动放大后从⑦,⑧脚输出电流,使加载电机正转,带动托盘水平移至机内播放位置。到位后,托盘闭检测开关K1被碰压闭合,微处理器检测到此信号后控制加载电机停转,托盘进盒完毕。 进行“OPEN”操作时,微处理器向D111的②脚输出卸载信号,经D111驱动放大后仍由⑦,⑧脚输出反向电流,加载电机反转的结果使托盘水平外移至机外固定位置。到位后托盘开检测开关K2被碰压闭合,微处理器据此信号控制加载电机停转,托盘到位出盒完毕。

71
3. 激光头组件控制电路 该机芯激光头的复位控制电路工作原理与飞利浦机芯类似,在此不再多述。 激光头复位后,不论托盘中是否有光盘,微处理器都发出激光二极管(LD)工作指令并输入D110的19 脚,再通过①脚输出低电压使VD103导通,LD得电发射激光,如图2.31所示。
工作指令并输入D110的19 脚,再通过①脚输出低电压使VD103导通,LD得电发射激光,如图2.31所示。.")
72
图2.31 激光组件控制电路

73
当激光二极管发光过强或过弱时,光检测二极管PD将检测到的信号从D110的②脚输入APC电路,经APC电路与参考量相比较后,通过①脚控制VD103的导通强弱来改变LD的发光强弱,起到自动控制LD光功率的作用。可调电阻(500W)可改变电路的起控点和LD功率。 4. 伺服电路 (1)聚焦伺服电路。索尼激光头采用6分光敏接收器,其中A,B,C,D用于接收主光束,产生聚焦信号与RF信号;两个边缘光敏管E,F接收辅助光,产生循迹信号。如图2.32(a)所示。
聚焦伺服电路。索尼激光头采用6分光敏接收器,其中A,B,C,D用于接收主光束,产生聚焦信号与RF信号;两个边缘光敏管E,F接收辅助光,产生循迹信号。如图2.32(a)所示。")
74
图 分光敏接收器原理

75
该机芯聚焦原理如下:主光束反射入4分光敏接收器A,B,C,D中,转变为RF信号。若聚焦良好,照在A,B,C,D上的是一个圆,各光敏接收器接收相等光通量,此时无误差信号输出;当物镜聚焦不良时,也就是光盘与物镜间距离过近或过远时,照在A,B,C,D上的是一个横向或竖向椭圆,如图2.32(b),(c)所示。此时在A,B和C,D上的光通量不等,即 (A+C)-(B+D)≠0,此误差信号为聚焦驱动电流的依据,经电路处理后控制聚焦线圈动作,使聚焦达到最佳状态。 信号流程如图2.31所示,4分光敏接收器A,B,C,D接收主光束并转变为相应电信号→送入D110产生聚焦误差信号→经D109进行数字处理,转变为聚焦PWM信号从⑧,⑨脚输入D104→D105进行聚焦驱动后将控制信号加于聚焦线圈→聚焦线圈受控带动物镜上下微动重新聚焦。
,(c)所示。此时在A,B和C,D上的光通量不等,即 (A+C)-(B+D)≠0,此误差信号为聚焦驱动电流的依据,经电路处理后控制聚焦线圈动作,使聚焦达到最佳状态。 信号流程如图2.31所示,4分光敏接收器A,B,C,D接收主光束并转变为相应电信号→送入D110产生聚焦误差信号→经D109进行数字处理,转变为聚焦PWM信号从⑧,⑨脚输入D104→D105进行聚焦驱动后将控制信号加于聚焦线圈→聚焦线圈受控带动物镜上下微动重新聚焦。")
76
(2)循迹伺服电路。6分光敏接收器中的E,F为循迹电路提供误差信号,激光头射出的两束辅助光束经光盘反射后照射在E,F上。离轨时,E,F上的光信号强度不等,形成误差信号,此信号由D110送入D109进行数字处理后把误差信号以循迹PWM控制信号方式输入驱动放大电路D105,经D105驱动循迹线圈,循迹线圈带动物镜水平微动并对准光盘纹轨中心,如图2.31所示。
循迹伺服电路。6分光敏接收器中的E,F为循迹电路提供误差信号,激光头射出的两束辅助光束经光盘反射后照射在E,F上。离轨时,E,F上的光信号强度不等,形成误差信号,此信号由D110送入D109进行数字处理后把误差信号以循迹PWM控制信号方式输入驱动放大电路D105,经D105驱动循迹线圈,循迹线圈带动物镜水平微动并对准光盘纹轨中心,如图2.31所示。")
77
( 3)进给伺服电路。进给误差信号也由光敏接收器E,F产生,循迹误差信号由D110输出后经低通滤波器取出低频成分,形成进给误差信号;然后送D109数字处理后经D105驱动放大;最后驱动进给电机转动并传动激光头水平移动,使激光头组件进入循迹伺服控制范围。 (4)主轴伺服电路。从D110输出的RF信号送入D109进行分离位时钟信号,分离出的位时钟频率与电路固有频率进行比较,比较过程就是CLV处理。处理所获误差信号转变为伺服控制信号,经D105驱动放大后改变主轴电机的转速,实现恒线速的目的。 由上可见,D109 CXD2545Q是一个数字伺服处理集成电路,功能齐全;D105 BA6392FP主要是4个驱动放大电路,完成信号的放大。
主轴伺服电路。从D110输出的RF信号送入D109进行分离位时钟信号,分离出的位时钟频率与电路固有频率进行比较,比较过程就是CLV处理。处理所获误差信号转变为伺服控制信号,经D105驱动放大后改变主轴电机的转速,实现恒线速的目的。 由上可见,D109 CXD2545Q是一个数字伺服处理集成电路,功能齐全;D105 BA6392FP主要是4个驱动放大电路,完成信号的放大。")
78
2.7 VCD影碟机机芯常见故障分析与维修 机芯部分负责激光头的识读、聚焦、循迹、进给及主轴伺服、电机和线圈驱动、数字信号处理和机构控制,这是光、机、电一体化部分,较易出现故障,约占整机故障的70%左右。其中,激光头的故障比例最大;其次是机械传动部分,主要故障是激光头限位开关、托盘进出检测开关不良及皮带打滑等;机芯电路部分的故障率最低,因为其技术成熟、工艺稳定。故在检修机芯部分时应把重点放在激光头和机械传动部分上。 机芯部分的工作过程是一个在微处理器控制下的程序控制、执行、信号监测的过程。各个程序的执行与否都由CPU根据检测到的信号而定。由于机芯工作是分步骤进行的,故对每一步骤进行检查,可较快地找到故障大致部位,然后再通过观察法、测电压法、测波形法等找到故障点。

79
VCD机的初始工作过程都是一样的:接通电源→电源输出多组工作电压到达机芯电路,使整机处于带电工作状态→CPU在复位脉冲作用下复位,使机芯和芯片全部回到初始工作状态→CPU检测托盘是否到位,若不在机内,控制加载电机旋转使其入盒到位→CPU检测激光头是否到位,若未到位,则控制进给电机旋转使其到达光盘零轨位置。到此,VCD机准备工作完毕,在此程序控制过程中,哪一个环节有故障,就会在那个地方停下来。

80
装盘并读盘过程 CPU相关脚收到“OPEN”开仓指令→CPU“卸载”脚输出“托盘出”指令(高电平或低电平)至驱动集成电路(或分立元件)→驱动电路相关引脚输出电压至加载电机→加载电机得电旋转,经传动机构顺畅传动使托盘到位→托盘位置检测开关被碰压并改变其原有通/断状态→此状态变化被CPU检测到并控制“卸载”脚输出加载电机停转指令→加载电机停转,托盘出仓到位。
至驱动集成电路(或分立元件)→驱动电路相关引脚输出电压至加载电机→加载电机得电旋转,经传动机构顺畅传动使托盘到位→托盘位置检测开关被碰压并改变其原有通/断状态→此状态变化被CPU检测到并控制 卸载 脚输出加载电机停转指令→加载电机停转,托盘出仓到位。")
81
在托盘上放入VCD光盘并输入“CLOSE”指令→CPU相关脚收到进仓指令→CPU“加载”脚输出“托盘出”指令(高电平或低电平)至驱动电路→驱动电路相关引脚输出电压至加载电机→加载电机得电旋转(旋转方向与“OPEN”时相反),经机械传动部件使托盘传动到位,激光头上升到位,托盘位置检测开关被碰压并改变其通/断状态→CPU据此信号控制“加载”脚输出加载电机停转指令→加载电机停转,托盘进仓到位,激光头组件上升到位,光盘夹持到位。
至驱动电路→驱动电路相关引脚输出电压至加载电机→加载电机得电旋转(旋转方向与 OPEN 时相反),经机械传动部件使托盘传动到位,激光头上升到位,托盘位置检测开关被碰压并改变其通/断状态→CPU据此信号控制 加载 脚输出加载电机停转指令→加载电机停转,托盘进仓到位,激光头组件上升到位,光盘夹持到位。")
82
CPU检测到托盘到位并且激光头位于光盘零轨位置后,CPU输出“LD ON”激光发射指令,送入伺服逻辑控制电路→由伺服逻辑控制电路输出约5V直流电压,送入激光头组件,使LD发射激光→APC电路启动,同时聚焦访问启动→聚焦线圈驱动物镜上下聚焦搜索三次→搜索到焦点后,输出聚焦OK信号(即FOK信号)→聚焦伺服启动,同时主轴启动指令经驱动放大产生主轴电机启动电压并加于主轴电机两端→主轴电机带动光盘转动→从光头中输出RF信号(0.8V~1.2V)→从RF信号中分离出位时钟信号、循迹误差信号、聚焦误差信号、进给误差信号并分别引入聚焦、循迹和进给、主轴伺服系统,实现自动控制、保证激光头正确读盘或播放光盘。
→聚焦伺服启动,同时主轴启动指令经驱动放大产生主轴电机启动电压并加于主轴电机两端→主轴电机带动光盘转动→从光头中输出RF信号(0.8V~1.2V)→从RF信号中分离出位时钟信号、循迹误差信号、聚焦误差信号、进给误差信号并分别引入聚焦、循迹和进给、主轴伺服系统,实现自动控制、保证激光头正确读盘或播放光盘。")
83
由以上工作流程可看出,各个步骤都有相应的关键点电压、信号和状态变化。对这些电压、信号、状态进行监测,可找到故障点。也可以利用屏幕显示来辅助分析故障部位
举例 播放时不读盘,显示屏显示无盘,说明故障主要在激光头识读部分,如激光二极管衰老,聚焦不良,光学部分脏污等,需要检查激光头部分。再配以观察主轴是否旋转及旋转是否正常,更容易确定故障范围。 显示屏无曲目、分秒计数或计数不稳,主要是激光头性能下降造成RF信号弱,主轴线速度不稳定或RF放大部分有问题,需要对电路有关部件进行调整及检修。

84
显示屏显示的曲目、分秒计数稳定均匀,说明机芯部分工作正常,故障在机芯之后。 机芯故障中以读片不正常、显示屏走秒不稳的检修最困难,此类故障有可能是激光头功率不足,也可能是聚焦、循迹不良或主轴伺服不稳造成,较难判断。此时要拆下机芯电路板,检测集成电路各关键点电压或波形。如FOK信号,当此端子为高电平时表示聚焦功能正确,此时机器启动旋转;又如,C2PO(错误指针)信号为高电平表示输出的信号有错误。
信号为高电平表示输出的信号有错误。")
85
飞利浦新型机芯伺服电路的几个关键点。 (1)SAA7372的 64脚是激光二极管接通控制端。操作“CLOSE”钮后在装盘结束、聚焦访问期间测量该脚电压,正常值为4.5V。 (2)OM5284的②脚是读盘FOK检测端,在聚焦访问期间测量该脚电压,正常应为0V。 (3)SAA7372的⑩脚是内部ADC的参考电压源,该脚电压要求稳定,一般为1.3V。 (4)SAA7372的17 脚电压为2.5V。 (5)SAA7372的21 、22 脚时钟频率为8.4672MHz。 与其他电路故障类似,机芯部分故障元件可能有以下几种情况:机械及传动部件故障;电阻、电容、电感开路、短路、变值、不良等引起电路电压异常,信号开路等故障;集成块坏;三极管坏、不良;轻触开关不导通或漏电;晶振及晶振电路坏,系统无时钟等故障
SAA7372的 64脚是激光二极管接通控制端。操作 CLOSE 钮后在装盘结束、聚焦访问期间测量该脚电压,正常值为4.5V。 (2)OM5284的②脚是读盘FOK检测端,在聚焦访问期间测量该脚电压,正常应为0V。 (3)SAA7372的⑩脚是内部ADC的参考电压源,该脚电压要求稳定,一般为1.3V。 (4)SAA7372的17 脚电压为2.5V。 (5)SAA7372的21 、22 脚时钟频率为8.4672MHz。 与其他电路故障类似,机芯部分故障元件可能有以下几种情况:机械及传动部件故障;电阻、电容、电感开路、短路、变值、不良等引起电路电压异常,信号开路等故障;集成块坏;三极管坏、不良;轻触开关不导通或漏电;晶振及晶振电路坏,系统无时钟等故障.")
86
2.7.4 VCD机不读盘故障检修流程和步骤检修步骤:
(1)清洁激光头,看故障能否排除,若有同型号激光头,最好采用代换法。 (2)电路板上插头、插座较多,长期工作易松动、受潮和积尘,造成接触不良;激光头排线经常径向移动,易出现排线松动、断裂。因此,检修时应仔细观察这些部件的工作情况,通过清洁、吹干、固定等措施来排除故障。
清洁激光头,看故障能否排除,若有同型号激光头,最好采用代换法。 (2)电路板上插头、插座较多,长期工作易松动、受潮和积尘,造成接触不良;激光头排线经常径向移动,易出现排线松动、断裂。因此,检修时应仔细观察这些部件的工作情况,通过清洁、吹干、固定等措施来排除故障。")
87
(3)不放碟,通电观察机器的初始工作。 ① 加电后激光头应有先向内移,后外移一点的初始抖动动作。若无则检查进给电机及其驱动控制电路。 ② 在进给电机带动激光头移动到光盘的导入区后,可看到物镜上下移动2~3次,以寻找焦点。若物镜不能上下移动,则表明聚焦搜索不能输出S形搜索信号或聚焦线圈及其驱动电路有故障。 ③ 物镜聚焦搜索的同时,激光二极管应能发出较亮的红色激光,可以从侧面目测激光是否正常。若激光不亮或强度变弱、应检查APC电路和CPU的激光二极管接通信号端(LD ON)是否有高低电平变化。
是否有高低电平变化。")
88
(4)若以上检查均未发现问题,这时可取一张好的碟片,观察碟片的转动情况。 第一种情况:碟片不转动,几秒钟后,显示屏显示无碟。遇到这种情况,应重点检查FOK信号是否正常,一般情况下,FOK信号端电压在停止状态为0V,找到焦点后应升为5V(飞利浦机芯的FOK信号端,如OM5234⑦脚、OM5284②脚,在停止状态为高电平5V,有盘并找到焦点后降为低电平0V)。若该脚电压正常,主轴不转多为以下几种原因: ① 主轴伺服电路不正常,无法输出主轴启动电压。 ② 主轴驱动电路或其供电不正常。 ③ 主轴电机损坏。
若以上检查均未发现问题,这时可取一张好的碟片,观察碟片的转动情况。 第一种情况:碟片不转动,几秒钟后,显示屏显示无碟。遇到这种情况,应重点检查FOK信号是否正常,一般情况下,FOK信号端电压在停止状态为0V,找到焦点后应升为5V(飞利浦机芯的FOK信号端,如OM5234⑦脚、OM5284②脚,在停止状态为高电平5V,有盘并找到焦点后降为低电平0V)。若该脚电压正常,主轴不转多为以下几种原因: ① 主轴伺服电路不正常,无法输出主轴启动电压。 ② 主轴驱动电路或其供电不正常。 ③ 主轴电机损坏。")
89
若在聚焦搜索时无FOK高电平信号输出,主轴必然不会转动,其原因相对来说要复杂一些,常见原因:一是激光头不正常,导致RF信号不正常,无法形成FOK信号;二是若机器有聚焦偏置电位器和聚焦增益电位器,检修时可微调一下,看主轴能否旋转;三是RF放大电路或外围电路不正常时,也不能形成正常的FOK信号,导致主轴无法旋转。 第二种情况:碟片转动正常,但转动较长时间后仍不能读出TOC,然后,显示屏显示无碟或错误字符。其原因多为循迹伺服不良。检修时,可用万用表R×Ⅰ档测量一下循迹线圈,阻值约为几欧姆,且光头有向左或向右偏移的动作,否则,为循迹线圈断线。若机器有循迹增迹或平衡电位器,此时可微调一下,观察机器是否可以读盘。有时进给伺服不良时会表现出上述故障现象。

90
第三种情况:主轴转一下即停,然后显示屏显示无碟,不能读出TOC。此种故障的检修可参阅主轴不转的检修方法。 第四种情况:主轴能够旋转,但转动时转速过快(慢)或反转,或转速不均匀。此故障原因多在主轴CLV伺服电路或主轴驱动电路上。常见原因: MHz时钟频率不稳;RF波形不正常,正常时,该信号应在1.0Vp-p以上,且眼图清晰,无杂波干扰;主轴伺服电路不正常,导致MDP信号、SPDL信号不正常;主轴驱动电路行进性能不良;伺服板上的频率可调电位器(部分机器有)失调或不良;当主轴电机不良时,常会表现出主轴须助力才能转或转速不稳的故障现象。
或反转,或转速不均匀。此故障原因多在主轴CLV伺服电路或主轴驱动电路上。常见原因: MHz时钟频率不稳;RF波形不正常,正常时,该信号应在1.0Vp-p以上,且眼图清晰,无杂波干扰;主轴伺服电路不正常,导致MDP信号、SPDL信号不正常;主轴驱动电路行进性能不良;伺服板上的频率可调电位器(部分机器有)失调或不良;当主轴电机不良时,常会表现出主轴须助力才能转或转速不稳的故障现象。")
91
2.8 VCD影碟机解码电路 MPEG1解码电路工作原理与维修 MPEG1解码电路以软件为基础,以解码芯片和外接存储器为硬件,将压缩(MPEG1)编码的数字视频信号和数字音频信号解码还原并运用多媒体技术对图像进行简单特技播放处理。常见解码芯片有CL48xx系列、ES32xx系列和OTIxx系列等。 1. MPEG1解码基本原理 MPEG1解码器的基本组成如图2.33所示。
编码的数字视频信号和数字音频信号解码还原并运用多媒体技术对图像进行简单特技播放处理。常见解码芯片有CL48xx系列、ES32xx系列和OTIxx系列等。 1. MPEG1解码基本原理 MPEG1解码器的基本组成如图2.33所示。")
92
图2.33 MPEG1解码器的基本组成

93
(1)基本电路。包含电源电路(+5V或+3.3V);复位电路;时钟电路产生工作时钟。 (2)主接口。该接口为系统控制微处理器(CPU)与解码器之间传输信息的接口。用于CPU与解码器的通信,如读/写控制、初始化、报告状态和控制等。 (3)CD接口。CD接口是解码器接收数字信号处理器输出的数据(DATA)信号、位时钟(BCK)信号和左右声道时钟(LRCK)信号等的输入口。 (4)RISC处理器和解压协处理器。它具有MPEG1解码功能和一些简单的图像处理功能。
基本电路。包含电源电路(+5V或+3.3V);复位电路;时钟电路产生工作时钟。 (2)主接口。该接口为系统控制微处理器(CPU)与解码器之间传输信息的接口。用于CPU与解码器的通信,如读/写控制、初始化、报告状态和控制等。 (3)CD接口。CD接口是解码器接收数字信号处理器输出的数据(DATA)信号、位时钟(BCK)信号和左右声道时钟(LRCK)信号等的输入口。 (4)RISC处理器和解压协处理器。它具有MPEG1解码功能和一些简单的图像处理功能。")
94
(5)存储器接口。该接口用于连接外接的存储器,配合RISC处理器和协处理器完成解压缩。 (6)视频接口。视频接口为解码器输出数字视频信号的输出口,有多种输出格式。 (7)音频接口。音频接口为解码器输出PCM数字音频信号的输出口。 (8)内部总线。内部总线是内部各电路间数据传输的线路,包括数据线和地址线。各种数据在地址指令作用下传送数据。
存储器接口。该接口用于连接外接的存储器,配合RISC处理器和协处理器完成解压缩。 (6)视频接口。视频接口为解码器输出数字视频信号的输出口,有多种输出格式。 (7)音频接口。音频接口为解码器输出PCM数字音频信号的输出口。 (8)内部总线。内部总线是内部各电路间数据传输的线路,包括数据线和地址线。各种数据在地址指令作用下传送数据。")
95
2. 输出的数据模式 播放时,微处理器按照展示时标(PTS)的顺序将存储器中相同的图像和声音数据同时读出,并由微码分别控制译码视频和音频数据传送至视频和音频数据线,通过视频接口与音频接口输出。 被还原的视频数据总是以YCbCr(亮度、蓝色差、红色差)格式存储,再由视频接口从动态存储器(DRAM)接收解压缩后的YCbCr数据并以YCbCr或RGB(红、绿、蓝三基色)像素方式输出。据解码器产生的视频时钟(VCK)和DRAM配置情况的不同,可设定三种视频输出模式:
的顺序将存储器中相同的图像和声音数据同时读出,并由微码分别控制译码视频和音频数据传送至视频和音频数据线,通过视频接口与音频接口输出。 被还原的视频数据总是以YCbCr(亮度、蓝色差、红色差)格式存储,再由视频接口从动态存储器(DRAM)接收解压缩后的YCbCr数据并以YCbCr或RGB(红、绿、蓝三基色)像素方式输出。据解码器产生的视频时钟(VCK)和DRAM配置情况的不同,可设定三种视频输出模式:")
96
(1)24位RGB数据。此模式数据解码器分别以8位红(R0~R7)数据,8位绿(G0~G7)数据和8位蓝(B0~B7)数据输出信号。各用8个端子(共24个端子)并行传送RGB数据。 (2)16位YCbCr(4∶2∶2)模式。在此模式中,解码器采用16位输出方式,其输出信号以8位亮度(Y)数据轮流与8位蓝色差信号(Cb)和8位红色差信号(Cr)构成16位CbY数据与16位CrY数据。用8个端子(Y0~Y7)输出亮度数据,用8个端子(C0~C7)轮流输出Cb、Cr数据,即用16个端子按编排的时间以CbY →CrY的顺序输出,称之为16bit宽YUV输出口。
24位RGB数据。此模式数据解码器分别以8位红(R0~R7)数据,8位绿(G0~G7)数据和8位蓝(B0~B7)数据输出信号。各用8个端子(共24个端子)并行传送RGB数据。 (2)16位YCbCr(4∶2∶2)模式。在此模式中,解码器采用16位输出方式,其输出信号以8位亮度(Y)数据轮流与8位蓝色差信号(Cb)和8位红色差信号(Cr)构成16位CbY数据与16位CrY数据。用8个端子(Y0~Y7)输出亮度数据,用8个端子(C0~C7)轮流输出Cb、Cr数据,即用16个端子按编排的时间以CbY →CrY的顺序输出,称之为16bit宽YUV输出口。")
97
(3)8位YCbCr(4∶2∶2)格式。在此模式中,解码器采用8位输出方式,信号依次以Cb→Y→Cr→Y的顺序输出。用8个端子(YC0~YC7)串行传送Cb、Y、Cr三个数据信号。
3. MPEG1解码电路简介 (1)CL系列MPEG1解码器。CL系列MPEG1解码器由美国斯高柏(C-CuBe)公司制造,常用的有CL480、CL484、CL680等型号。
CL系列MPEG1解码器。CL系列MPEG1解码器由美国斯高柏(C-CuBe)公司制造,常用的有CL480、CL484、CL680等型号。")
98
CL680解码器是第三代MPEG1解码器。它除了兼容CL484外,还将PAL/NTSC制式编码器集成在同一芯片中,并能自动切换制式。它既有复合视频信号输出,又有S视频信号输出,图像纠错能力进一步加强;在声音处理方面,增加了扩展功能、左右声道转换功能。该解码器有如下特点: 数字式NTSC/PAL编码器集成其中,可直接输出Y/C分离信号和复合视频信号,具有极佳的图像质量。 对DRAM的要求低,只需4Mbit的DRAM就可输出NTSC和PAL信号,还可以实现高质量静像。 增加了用户DRAM空间,可提供50%的DRAM空间,用于存储用户定义的图像。 低功耗运行,电源电压2.7V~3.6V(功率小于1W)。 完全支持VCD Ver 2.0及以下版本。 可接收CD数据信号并进行处理,不需要外电路。
。 完全支持VCD Ver 2.0及以下版本。 可接收CD数据信号并进行处理,不需要外电路。")
99
(2)ES系列解码器。ES系列解码器是美国依雅时公司的产品,常用的有ES3204,ES3208,ES3210等型号。粗略地对比,ES3204相当于CL480,ES3208/ES3210相当于CL484。 ES3210的功能与ES3208完全相同,只是封装形式不同。ES3207是依雅时公司为ES3210开发的配套集成电路。该集成电路将数字电视制式编码器、音频D/A变换器、卡拉OK回声混响处理器和PLL时钟发生器集成在同一块芯片中,这样就减少了解码电路中的元器件数量,降低了成本,提高了可靠性。
ES系列解码器。ES系列解码器是美国依雅时公司的产品,常用的有ES3204,ES3208,ES3210等型号。粗略地对比,ES3204相当于CL480,ES3208/ES3210相当于CL484。 ES3210的功能与ES3208完全相同,只是封装形式不同。ES3207是依雅时公司为ES3210开发的配套集成电路。该集成电路将数字电视制式编码器、音频D/A变换器、卡拉OK回声混响处理器和PLL时钟发生器集成在同一块芯片中,这样就减少了解码电路中的元器件数量,降低了成本,提高了可靠性。")
100
(3)华邦解码器。中国台湾华邦电子公司生产的华邦解码器也较常用。W9925QF是专门为VCD视盘机开发的解码芯片,它只需外接4MB动态存储器(DRAM),不用外接只读存储器(ROM),具有慢放、快放、静像、逐帧重放等功能。该解码芯片为扁平塑料封装,采用3.3V节电模式,功耗0.45W。 4. MPEG1解码电路的维修 解码系统的故障率不高,但检修难度较大,主要是因为解码器电路集成度高且功能复杂,与周边电路无论是在软件还是硬件上都联系紧密。检修时需借助故障现象(如是否有屏幕显示,声图是否同时不正常),根据功能分析来确定故障部位。
,根据功能分析来确定故障部位。")
101
(1)充分利用MPEG1音频和视频解码互锁这一特点来判断故障部位。为了保证VCD光盘图像和声音同步播放,MPEG1采用图声互锁技术,声图中有一方在解码时出现故障,都会使机器无法解码,造成图声全无。因此若故障为有声无图,根据互锁原理,解码芯片图声解码正常,故障只在图像D/A变换及其后的编码电路、输出电路中;若有图无声,则故障在音频D/A变换及功放电路上。 (2)检修解码电路时要特别重视电路的工作条件是否具备。数字电路能否正常工作,除了线路、电源、信号无误外还应有诸如时钟、复位信号、片选信号等必备的工作条件。所以,当出现图声全无故障时,不应首先判断是解码芯片损坏,而应先检查解码芯片的工作条件是否具备。解码系统正常工作的相关信号如下。
检修解码电路时要特别重视电路的工作条件是否具备。数字电路能否正常工作,除了线路、电源、信号无误外还应有诸如时钟、复位信号、片选信号等必备的工作条件。所以,当出现图声全无故障时,不应首先判断是解码芯片损坏,而应先检查解码芯片的工作条件是否具备。解码系统正常工作的相关信号如下。")
102
① 工作电压。CL48X系列、CL680、ES3210解码器采用3
① 工作电压。CL48X系列、CL680、ES3210解码器采用3.3V电源供电,ES3204、OTI207解码器工作电压为+5V。 ② GCK时钟信号。CL48X系列解码器GCK时钟信号采用40MHz或40.5MHz,CL680采用42.3MHz,其幅度一般在1VP-P左右,可用示波器检测。 ③ 复位信号。复位信号只有开机瞬间才能测定,该信号为一高低变化电平,复位后的工作期间稳定在同一电平上,一般为+5V。 ④ 视频时钟(VCK)信号。一般解码器所需的视频时钟为27MHz或13.5MHz,可用示波器在CL48X系列的99 脚,CL680的103 、106 脚,ES3204的 124、125 脚,ES3210的42 、43 脚,OTI207的40 脚分别测其波形。 ⑤ CD接口信号,包括系统时钟(16.934MHz)、左右声道时钟(LRCK)信号、位时钟(BCK)信号和串行数据(DATA)信号。后三个信号均由机芯电路中的DSP电路提供,可用示波器观察,一般幅度为5VP-P。
信号。一般解码器所需的视频时钟为27MHz或13.5MHz,可用示波器在CL48X系列的99 脚,CL680的103 、106 脚,ES3204的 124、125 脚,ES3210的42 、43 脚,OTI207的40 脚分别测其波形。 ⑤ CD接口信号,包括系统时钟(16.934MHz)、左右声道时钟(LRCK)信号、位时钟(BCK)信号和串行数据(DATA)信号。后三个信号均由机芯电路中的DSP电路提供,可用示波器观察,一般幅度为5VP-P。")
103
(3)检查软件是否正常。检查了所有硬件仍不能排除故障时,应考虑机器软件是否有故障。软件数据由存储器提供,故有条件时可找同型号、同机种的存储器进行代换。 (4)通过检测信号的有无确定故障部位。数据信号很难测量,可根据解码电路各部分的任务及工作过程,通过判断信号的有无确定故障部位。例如,检修有声无图故障时,根据互锁原理可知,故障在解码后的图像支路,则应首先测量图像编码器输出,当用万用表测出R、G、B中一路有0V~5V的平均电压时,说明图像编码无故障,因为R、G、B是视频信号,只要其中一路有输出电压,肯定有图像输出。反之,若R、G、B无图像输出,肯定编码器有故障。
检查软件是否正常。检查了所有硬件仍不能排除故障时,应考虑机器软件是否有故障。软件数据由存储器提供,故有条件时可找同型号、同机种的存储器进行代换。 (4)通过检测信号的有无确定故障部位。数据信号很难测量,可根据解码电路各部分的任务及工作过程,通过判断信号的有无确定故障部位。例如,检修有声无图故障时,根据互锁原理可知,故障在解码后的图像支路,则应首先测量图像编码器输出,当用万用表测出R、G、B中一路有0V~5V的平均电压时,说明图像编码无故障,因为R、G、B是视频信号,只要其中一路有输出电压,肯定有图像输出。反之,若R、G、B无图像输出,肯定编码器有故障。")
104
音/视频输出电路分析与维修 视频信号处理电路用于将MPEG1解码器输出的各种视频数据处理成模拟的NTSC/PAL制式的视频信号;音频信号处理器电路用于将解码器输出的PCM音频数字信号还原成模拟音频信号,然后与卡拉OK电路处理后的语音信号混合在一起,产生一定的声音效果。

105
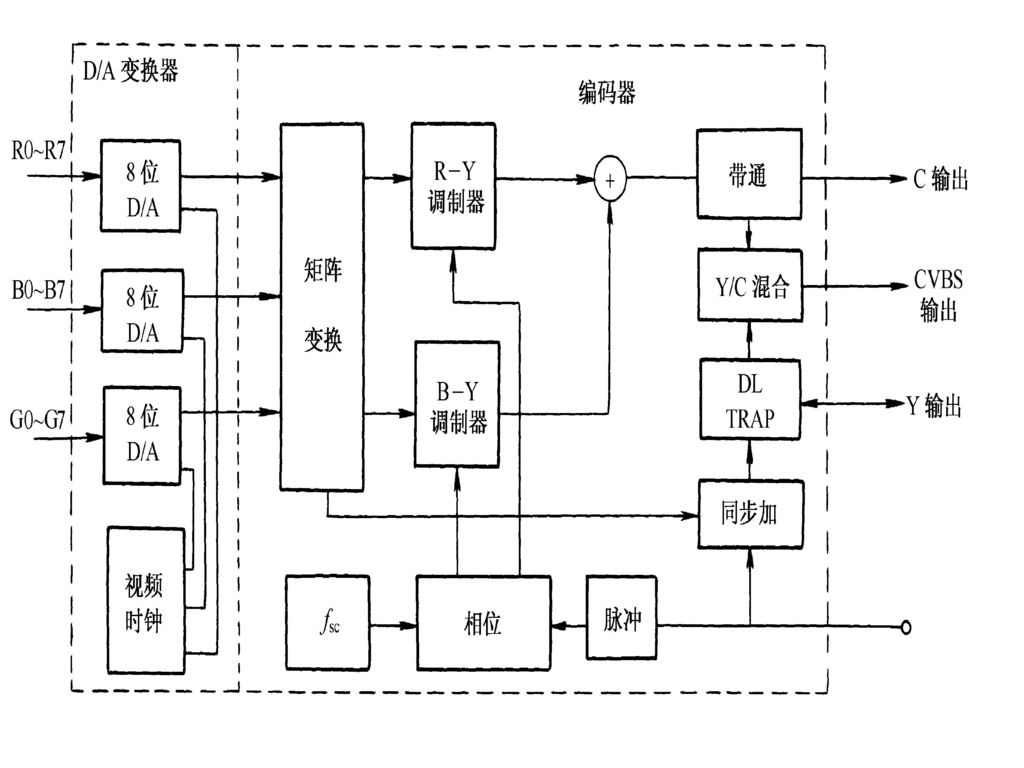
1. 模拟处理方式视频电路 此方式首先把数字视频信号经D/A(数/模)变换器变换成模拟的R、G、B信号(或R-Y、B-Y、G-Y信号),然后用模拟视频编码器编制成复合的视频信号,还可输出亮度(Y)和色度(C)信号。其组成框图如图2.34所示。
变换器变换成模拟的R、G、B信号(或R-Y、B-Y、G-Y信号),然后用模拟视频编码器编制成复合的视频信号,还可输出亮度(Y)和色度(C)信号。其组成框图如图2.34所示。 .")
107
由图中可以看出,3组8位R、G、B数字视频信号送入3通道视频D/A变换器(如NEC662、GM0250Q、TL5612等),分别在视频时钟VCK(13.5MHz)的作用下变换成R、G、B三基色信号并送入视频编码器内部矩阵电路(如CXA1645P、TDA8501、KA21981D等),编码成亮度(Y)信号和两个色差信号R-Y和B-Y;然后在亮度信号上加上解调出的复合同步信号,两个色差信号调制成NTSC或PAL制式的色度信号。二者混合后输出复合的视频信号。
,分别在视频时钟VCK(13.5MHz)的作用下变换成R、G、B三基色信号并送入视频编码器内部矩阵电路(如CXA1645P、TDA8501、KA21981D等),编码成亮度(Y)信号和两个色差信号R-Y和B-Y;然后在亮度信号上加上解调出的复合同步信号,两个色差信号调制成NTSC或PAL制式的色度信号。二者混合后输出复合的视频信号。")
108
2. 数字视频编码集成电路 数字视频编码集成IC有BT852、BT866、CH7210、SAA7185和ES3207等,下面将重点介绍ES3207和SAA7185。 ES3207是专门为ES3210配套的视频编码、音频D/A和卡拉OK处理的单片集成电路,可同时输出复合视频信号和S视频信号。工作时,8位数字视频信号从86 、89 、92 、94 、96 、98 脚输入。先被处理成编码前的8位Y信号、8位R-Y和B-Y信号,然后经编码器编制成PAL制式或NTSC制式的视频数字信号,分别送入3只9bit的D/A变换器,一只用于复合视频的转换,另两只用于S视频的亮度和色度信号的转换,其复合视频信号从64 脚输出,亮度信号从61 脚输出,色度信号从58 脚输出。

109
该集成电路的其他关键点还有:3、4、5、16 、32 脚为+5V电源脚,44 、45 、59 、60 脚为模拟+5V电源脚,13 、24 脚为复位脚(低电平有效),74 脚为27MHz晶振输出。检修时可先检查这些关键点的情况是否正常。 与ES3207不同的是,SAA7185只能处理视频信号,不能同时处理音频信号。该编码器有3路8位数据信号输入接口,在内部系统控制下选择信号输入口。工作时,SAA7185首先接受微处理器输出的复位脉冲并对内部进行清零复位,然后所有数字I/O(输入/输出)口按软件要求设置输入模式,经选择后,输入的数字信号才允许输入编码器,产生Y、Cr、Cb信号。编码的Y和C数字信号被DAC变换成模拟视频信号,分别从49 、 51和 53脚同时输出S视频方式的Y/C分量信号和复合视频信号。
,74 脚为27MHz晶振输出。检修时可先检查这些关键点的情况是否正常。 与ES3207不同的是,SAA7185只能处理视频信号,不能同时处理音频信号。该编码器有3路8位数据信号输入接口,在内部系统控制下选择信号输入口。工作时,SAA7185首先接受微处理器输出的复位脉冲并对内部进行清零复位,然后所有数字I/O(输入/输出)口按软件要求设置输入模式,经选择后,输入的数字信号才允许输入编码器,产生Y、Cr、Cb信号。编码的Y和C数字信号被DAC变换成模拟视频信号,分别从49 、 51和 53脚同时输出S视频方式的Y/C分量信号和复合视频信号。")
110
3. 音频D/A变换电路 音频信号处理基本电路如图2
3. 音频D/A变换电路 音频信号处理基本电路如图2.35所示,主要由PCM音频数字处理电路、语音信号处理电路构成。前者用于将解码器输出的解压缩后的音频数字信号还原成模拟音频信号,后者用于对语音信号进行延迟混响或升降调控制处理,两者混合后经输出放大器处理成具有一定声效的两路音频信号输出。

111
图2.35 音频信号处理基本电路

112
音频D/A变换器有PCM1710/1712/1715/1717、TDA1305/1306、AD18558和SM5875BM等型号,本节介绍SM5875BM。 SM5875BM是一种超大规模音频信号D/A转换集成电路,具有数字信号去加重、数字式音频衰减、数字静音、标准/倍速模式选择和低电压供电功能。 SM5875BM的信号处理过程如图2.36所示。SM5875BM首先将输入的串行数据信号转换成并行数据信号并送入数字滤波电路,滤除音频信号数字化时产生的量化噪声(音频信号采样频率为44.1kHz)。经数字滤波器处理后的16bit数字信号送入1bit量化器和三级噪声整形电路,消除音频范围内的量化噪声,提高音频信号的信噪比。经噪声整形后的信号输入脉冲宽度调制(PCM)器内,把数字信号组合成不同的脉冲宽度并送入低通滤波器,利用积分原理进行D/A转换,转换后的左右声道信号分别从12 、14 脚输出。
。经数字滤波器处理后的16bit数字信号送入1bit量化器和三级噪声整形电路,消除音频范围内的量化噪声,提高音频信号的信噪比。经噪声整形后的信号输入脉冲宽度调制(PCM)器内,把数字信号组合成不同的脉冲宽度并送入低通滤波器,利用积分原理进行D/A转换,转换后的左右声道信号分别从12 、14 脚输出。")
113
图2.36 信号处理过 该集成电路的关键点如下:③脚为16.934MHz时钟信号输出脚;11 、15 脚为左右声道模拟电源;22 脚为复位脚(低电平有效); 23脚为静音/衰减模式选择脚,高电平时为静音模式。
; 23脚为静音/衰减模式选择脚,高电平时为静音模式。")
114
4. 视频电路的维修。 视频电路的维修主要是检查相应的编码器及其外围元件,必要时也要检查解码器是否正常。检测时仍要检查关键点电压、波形等参数,分析故障点,判断外围元件(如电阻、电容)是否有开路、接触不良等故障。 下面以视频编码器SAA7185为例介绍无图像和无彩色(包括彩色异常)故障的检修流程,如图2.37和图2.38所示
是否有开路、接触不良等故障。 下面以视频编码器SAA7185为例介绍无图像和无彩色(包括彩色异常)故障的检修流程,如图2.37和图2.38所示.")
115
图2.37 无图像故障检修流程图

116
图2.38 无彩色或彩色异常故障检修流程图

117
2.9 系统控制与显示电路的原理与维修 系统控制电路是用来协调处理复杂的电子线路、精密的激光头和光盘旋转机械之间互相配合工作的电路。 系统控制电路的作用与组成系统控制电路的作用主要有如下三个: (1)接收用户操作信息并控制激光重放电路与机构,使其进入工作状态。 (2)进行自动控制,使机器顺利完成各项任务。 (3)自动保护,通过状态检测,对机器进行保护。 系统控制电路所控制的主要有激光头伺服、主轴伺服、托盘和旋转盘、视频信号处理电路、音频信号处理电路和显示电路。 微处理器是整个系统控制的中心,以其为核心的控制系统如图2.39所示。
接收用户操作信息并控制激光重放电路与机构,使其进入工作状态。 (2)进行自动控制,使机器顺利完成各项任务。 (3)自动保护,通过状态检测,对机器进行保护。 系统控制电路所控制的主要有激光头伺服、主轴伺服、托盘和旋转盘、视频信号处理电路、音频信号处理电路和显示电路。 微处理器是整个系统控制的中心,以其为核心的控制系统如图2.39所示。")
118
图2.39 系统控制基本组成电路

119
系统控制电路原理 1. 系统初始化 VCD机的控制和信号处理都是按一定程序进行的,而此程序的存储器(如DRAM和各硬件接口寄存器)中的数据都将因断电而消失。所以在每次开机时都必须进行系统初始化,让机器进入预设的工作状态。 开机通电后,微处理器(CPU)首先被复位,使其自身初始化;然后CPU先对显示电路初始化,显示屏按设计要求显示字符;再对MPEG1解码内部寄存器进行初始化,并将ROM中的微码载入DRAM与解码器,开机画面随即产生;最后对机芯控制电路初始化,使机芯完成光头复位、搜索、检测等动态控制。
中的数据都将因断电而消失。所以在每次开机时都必须进行系统初始化,让机器进入预设的工作状态。 开机通电后,微处理器(CPU)首先被复位,使其自身初始化;然后CPU先对显示电路初始化,显示屏按设计要求显示字符;再对MPEG1解码内部寄存器进行初始化,并将ROM中的微码载入DRAM与解码器,开机画面随即产生;最后对机芯控制电路初始化,使机芯完成光头复位、搜索、检测等动态控制。")
120
2. 微处理器输入检测电路 微处理器要对系统进行各种控制,必须用输入检测电路对各部分的工作状态进行检测,然后根据检测信息进入相应的工作程序或自动保护程序。 (1)操作输入电路。操作输入电路是用来接收操作指令的窗口,有本机键控(机身上的按钮)和遥控两种。 和普通按键电话机相同,VCD机机身上的按钮输入方式也采用矩阵电路,如图2.40所示。各按钮开关安装在微处理器输入线与输出线构成的矩阵交叉点上,各输出端囗输出不同的脉冲(键控扫描脉冲)去扫描各操作按钮。按下某按钮,输入、输出交叉线短接,扫描脉冲通过输入口送入微处理器。例如按下按钮开关SW320,处理器19 脚的扫描脉冲经过D305和SW320送达13 脚,“PLAY”操作信号被微处理器接收到。
操作输入电路。操作输入电路是用来接收操作指令的窗口,有本机键控(机身上的按钮)和遥控两种。 和普通按键电话机相同,VCD机机身上的按钮输入方式也采用矩阵电路,如图2.40所示。各按钮开关安装在微处理器输入线与输出线构成的矩阵交叉点上,各输出端囗输出不同的脉冲(键控扫描脉冲)去扫描各操作按钮。按下某按钮,输入、输出交叉线短接,扫描脉冲通过输入口送入微处理器。例如按下按钮开关SW320,处理器19 脚的扫描脉冲经过D305和SW320送达13 脚, PLAY 操作信号被微处理器接收到。")
121
图2.40 矩阵式操作输入电路

122
除了采用矩阵电路外,还可采用红外遥控收发输入电路,在此不再详述。 (2)托盘进出检测电路。为了判断托盘进出机构所处位置,设立了托盘进出检测电路,可随时了解机械传动机构是否准确到位,便于实施停转控制或下一步操作控制。具体电路是在机芯托盘进出机构的传动部分安装托盘进与托盘出两个检测开关(索尼机芯)或托盘位置检测开关(飞利浦机芯),利用被电机传动的机械来碰压这些开关,使之进行通断转换并将此开关脉冲信号输入微处理器。微处理器将此通断信息与预设的进行比较后做出相应的控制。
托盘进出检测电路。为了判断托盘进出机构所处位置,设立了托盘进出检测电路,可随时了解机械传动机构是否准确到位,便于实施停转控制或下一步操作控制。具体电路是在机芯托盘进出机构的传动部分安装托盘进与托盘出两个检测开关(索尼机芯)或托盘位置检测开关(飞利浦机芯),利用被电机传动的机械来碰压这些开关,使之进行通断转换并将此开关脉冲信号输入微处理器。微处理器将此通断信息与预设的进行比较后做出相应的控制。")
123
(3)伺服信号检测电路。VCD机中的伺服信号,如聚焦、进给、循迹和位时钟信号,一则反馈到伺服系统作为比较信号进行伺服自动控制;二则送至微处理器,作为激光头状态与主轴电机旋转情况的检测信号,据此启动循迹、聚焦、进给、主轴等各种伺服,调整控制或执行停机保护控制。 有关系统控制中的托盘进出、加/卸载控制和激光头组件控制过程的内容请参见第4章。
伺服信号检测电路。VCD机中的伺服信号,如聚焦、进给、循迹和位时钟信号,一则反馈到伺服系统作为比较信号进行伺服自动控制;二则送至微处理器,作为激光头状态与主轴电机旋转情况的检测信号,据此启动循迹、聚焦、进给、主轴等各种伺服,调整控制或执行停机保护控制。 有关系统控制中的托盘进出、加/卸载控制和激光头组件控制过程的内容请参见第4章。")
124
显示电路 显示电路主要由微处理器和显示屏组成。新科VCD-320型机的显示电路如图2.41所示,微处理器U1在输出各种操作控制指令的同时,通过与数字信号集成电路通信,接收机芯信息,并将其处理为脉冲信号与段脉冲信号,分别通过插件KCT2和KCT3送到显示屏。从U1 1~18 和 77~80 脚输出的段脉冲送到显示屏的阳极(5~26 脚);从U1 25~28 脚输出4个位脉冲送到显示屏的栅极( 30~34 脚),显示操作与机芯运行状态。
;从U1 25~28 脚输出4个位脉冲送到显示屏的栅极( 30~34 脚),显示操作与机芯运行状态。")
125
图2.41 显示电路

126
系统控制与显示电路实例分析 新科VCD-320型VCD机的系统控制电路由微处理器CXP 与各受控电路等构成,如图2.42所示。 CXP 主要用于操作、显示、状态检测与机芯控制,以及用于控制D201进行音频解码和对整机进行系统控制等。 系统控制电路与视频输出电路的维修方法类似,主要检查电路工作条件(如电源、时钟信号等)是否满足;各输入/输出端口的信号、电压是否正常;各检测和执行元件是否有故障等。
是否满足;各输入/输出端口的信号、电压是否正常;各检测和执行元件是否有故障等。")
127
显示系统分液晶显示屏和荧光显示屏两种。使用液晶显示屏时,驱动电压由CPU提供。当显示不正常时,应首先检查供给显示屏的电压是否正常,然后检查CPU的驱动脚是否损坏。当某一字段不显示时,应单独检查该段的供电电流。使用荧光显示屏时,需提供-20V~-27V的高压,还要有一组交流3.3V左右的灯丝电源。由于显示屏采用动态显示,故栅极和阳极均加动态的脉冲电压,检查时可用万用表检查灯丝及高压;对于脉冲电压,必要时可用示波器观察。

128
图2.42 系统控制基本组成电路

129
2.10 电源电路的原理与维修 电源电路的作用是供给VCD机各部件工作电压,常用的有±5V,±12V,±3.2V, ±10V,-20V,交流3.3V等,由于VCD机整机消耗功率较小,所以采用串联稳压电源的机型多于开关稳压电源机型。 串联型稳压电源的结构形式为先用降压变压器降压,输出多组低压交流电,用三端稳压器(或四端稳压器)稳压输出多组正负电压供给整机各部分。
稳压输出多组正负电压供给整机各部分。")
130
万利达VCD-N30型机电源 图2.43所示为万利达VCD-N30型机电源电路图。电源经降压变压器降压后输出25V,16V,16.5V,8.5V和3.5V等5组交流电压。 交流8.5V电压经B1桥式整流后输出脉动直流电压,送入四端稳压器Q4①脚,稳压成+5V后从②脚分两路输出。一路由JP2⑤、⑥脚送往各电路板;另一路送入由Q1,Q2等组成的3.2V稳压电路,输出+3.2V电压送往解码板。 交流16V经B2桥式整流输出的脉动直流电压送入Q3①脚,稳压成+12V后从③脚输出并送往各电路。 交流16.5V经B3桥式整流成脉动直流电压送入Q5(7912)②脚,稳压成-12V后从③脚输出,也送往各电路。 交流25V经B4桥式整流成脉动直流电压,经稳压二极管DW1稳压后输出-25V,并送往显示电路。 显示屏所需的交流3.2V电压直接由变压器提供。
②脚,稳压成-12V后从③脚输出,也送往各电路。 交流25V经B4桥式整流成脉动直流电压,经稳压二极管DW1稳压后输出-25V,并送往显示电路。 显示屏所需的交流3.2V电压直接由变压器提供。")
131
图2.43 万利达VCD-N30型机电源电路

132
锦电JVD-2060型机电源 图2.44是锦电JVD-2060型机的电源电路图,该电路除能提供+3.3V,+5V,+12V,-25V和交流3V电压外,其中两组电源+5V和+12V还受“STANDBY”钮控制。 交流220V电源经变压器降压后,有4组输出: 第一组降压后的交流11V电压经D207~D210桥式整流、滤波和稳压(IC201),产生S+5V电压,分别送到解码电路板和面板电路。 第二组降压后的交流18V电压经D203~D206桥式整流、滤波和稳压,产生+12V和A+12V,分别送到解码电路和CD电路板。
,产生S+5V电压,分别送到解码电路板和面板电路。 第二组降压后的交流18V电压经D203~D206桥式整流、滤波和稳压,产生+12V和A+12V,分别送到解码电路和CD电路板。")
133
图2.44 锦电JVD-2060型机

134
第三组降压后的交流30V电压经D211~D214桥式整流和稳压,产生-25V直流电压,送到面板显示电路。 第四组降压后的交流3V电压送到显示屏作为灯丝电压。 电源开/待机原理如下:接通市电后,IC 脚获得S+5V电压并开始工作,令其17 脚输出待机低电平指令,经R205送到Q202,使Q202导通,也使Q201和Q203导通。这样就把IC204③脚的负电压引入IC203①脚和IC202①脚,使IC203和IC202停止工作,无电压输出,全机只获得部分工作电压而处于待机状态。 按下“STANDBY”钮,IC 脚变为高电平,Q202截止,Q201与Q203随之截止后无负压输出,IC203①脚获得+4V偏压后从②脚输出+5V,IC202①脚获得+10V偏压后从②脚输出+12V,全机获得全部工作电压而进入工作状态。

135
电源电路的维修 串联稳压电源和一般的稳压电源的维修方法相同。检修时应首先判断是否是电源故障,然后从电源输出端往前级查找故障点。由于电源有多组输出,若每组电源都不正常,则可能是变压器、保险管故障或后级电流过大(如电路局部短路等);若只有一两组电源不正常,则可能是这一两组电源的整流、滤波、稳压部分或其负载故障,也可能是二次开机的故障。检修时应在理顺电路原理的基础上重点检查三端稳压集成块、滤波电容、整流二极管、变压器和接线是否良好。对于电源有二次开机的稳压电源,还应从其电源的控制原理出发来检修。如锦电JVD-2060型机的电源维修,还要检查IC103的 40和 17脚电压。
;若只有一两组电源不正常,则可能是这一两组电源的整流、滤波、稳压部分或其负载故障,也可能是二次开机的故障。检修时应在理顺电路原理的基础上重点检查三端稳压集成块、滤波电容、整流二极管、变压器和接线是否良好。对于电源有二次开机的稳压电源,还应从其电源的控制原理出发来检修。如锦电JVD-2060型机的电源维修,还要检查IC103的 40和 17脚电压。")
136
本章小结 1. 飞利浦机芯和索尼机芯主要由托盘进出机构、夹持机构、进给机构、光盘旋转机构和物镜机构组成。托盘进出机构将光盘运入或运出;夹持机构的作用是将光盘夹紧,以便高速旋转;进给机构带动物镜水平移动,以读取从光盘内圈到外圈的信息;光盘旋转机构带动光盘以恒定的线速度高速旋转;物镜主要用于发射和接收激光束。 2. VCD影碟机机芯电路主要对激光头拾取数字信号进行处理并对机芯各部件进行伺服控制,在微处理器的统一控制下,机芯电路完成数据通信(包括电路复位、时钟信号传输及数据传递)、托盘进/出控制、激光头组件控制及各种伺服控制,以达到精确读取光盘信息的目的。
、托盘进/出控制、激光头组件控制及各种伺服控制,以达到精确读取光盘信息的目的。")
137
3. 机芯故障以激光头故障居多,其次是机械传动部分及各种开关和电机等,电路故障较少,检修时应根据VCD机各工作步骤是否正常来查找故障点,根据检测关键点电压、波形及屏幕显示来综合分析和判断故障。 4. MPEG1解码电路由基本电路、主接口、CD接口、RISC处理器和解压协处理器、存储器接口、视频接口、音频接口、内部总线组成,输出的视频信号有24位RGB数据模式、16位YCbCr模式、8位YCbCr模式三种形式。常用MPEG1解码器有CLX系列(CL480,CL484,CL680),ES系列(ES3204、ES3208、ES3210),华邦解码器(W9925QF)等。5. 可利用图声互锁原理、电路工作条件是否具备、软件是否正常以及解码任务完成情况来判断MPEG1解码器电路故障部位。
,ES系列(ES3204、ES3208、ES3210),华邦解码器(W9925QF)等。5. 可利用图声互锁原理、电路工作条件是否具备、软件是否正常以及解码任务完成情况来判断MPEG1解码器电路故障部位。.")
138
6. 视频信号处理电路用于将MPEG1解码器输出的视频数据变成NTSC/PAL制式视频信号。常用数字视频编码集成电路有BT852,BT866,CH7201,SAA7185,ES3207等。音频信号经音频信号处理电路,与卡拉OK电路处理后的话音信号混合在一起,形成一定的声音效果。 7. 交流控制电路在微处理器的统一指挥下协调处理复杂的电子线路、精密的激光头和光盘旋转机械之间互相配合的电路,主要控制激光头伺服、主轴伺服、托盘和旋转盘、视频信号处理电路、音频信号处理电路和显示电路。 8. 电源电路多采用串联稳压式,较少使用开关电源,输出±5V,±12V,+3.2V,+10V,-20V和交流3.3V等多组电压。串联稳压电源的故障多发生在变压器和三端稳压集成块。

139
习题2 1. 常见的机芯有哪两种? 2. 机芯基本组成有哪几部分?各部分的作用是什么? 3. 飞利浦机芯的优点是什么? 4. 飞利浦机芯与索尼机芯托盘进出检测开关有什么不同?各有何作用? 5. 飞利浦数码机芯复位电路的工作过程是怎样的? 6. 伺服电路包括哪些伺服? 7. 光盘为什么要以恒定线速度旋转? 8. 简述索尼机芯聚焦伺服原理。 9. 机芯部分故障元件有哪几种情况?

140
10. 简述机芯检修的一般步骤。 11. MPEG1解码器的基本组成有哪些? 12. 常见的解码芯片有哪几种?其工作电压有哪两种? 13
10. 简述机芯检修的一般步骤。 11. MPEG1解码器的基本组成有哪些? 12. 常见的解码芯片有哪几种?其工作电压有哪两种? 13. 解码器输出的三种视频输出模式分别是什么? 14. MPEG1解码电路的维修思路是什么? 15. 视频信号和音频信号处理电路的作用分别是什么? 16. 视频电路的维修方法是什么? 17. 系统控制电路的控制对象有哪些? 18. 系统初始化的过程是怎样的?某VCD机的交流3.5V电压无供电,将会造成什么故障?

Similar presentations
. 什么叫总压 ? (2). 总压的测量方法 (3). 总压测量的关键 (4). 要求:总压管对气 流方向越不敏感越好 (a). 孔口无毛刺,壁面 光滑; (b). 要对准气流方向.>")









 专题课件.>")

 ——把握人事,洞察百态 补上一课 如何读懂小说 第1讲 情节 第2讲 人物 第3讲 环境 >")






