Download presentation
1
拟动力试验 伪动力试验,计算机加载器联机试验 地震发生和传播的随机性 周期性加载的加载历程是假定的,与实际地震的非周期反应有很大差别
理想的试验加载是按某一确定的地震反应来制订相应的加载制度

2
计算机联机试验的提出 在研究工作中人们从结构试验和数值分析两方面着手,促使试验技术和计算技术的发展。由于各种因素的影响,由试验结果所确定的数学分析模型的精度存在疑问,解决方法——将计算机技术直接应用于试验。

3
非周期性加载的两种方案 给定输入的加速度记录,通过计算机作非线性动力分析,计算得到位移反应曲线,将位移反应历程作为输入,控制加载。这种方法要求事先假定结构的恢复力模型,这种恢复力模型是否符合实际? 将计算机及计算技术直接应用于控制试验加载。不需要事先假定结构的恢复力模型,恢复力可以直接从作用于试件的加载器的荷载值测得,由计算机完成非线性地震反应微分方程的求解。

6
拟动力试验发展历史 1969年日本伯野元彦博士最初提出联机试验,将模拟计算机与试验联线成一个系统。
1971年日本冈田恒男教授应用于结构抗震试验。 1981年日美合作完成一座七层钢筋混凝土框架房屋足尺结构拟动力试验。 1983年中国建筑科学研究院结构所完成1/6底层大空间12层剪力墙结构拟动力试验。

7
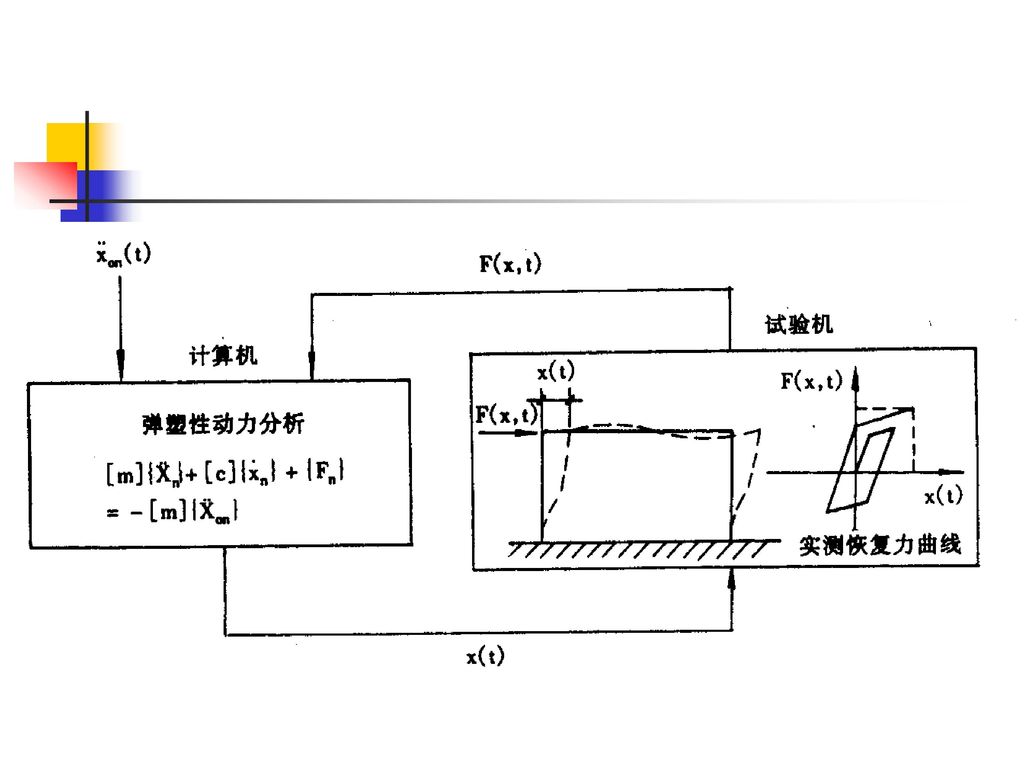
计算机—加载器联机系统工作原理 用电子计算机将地震地面运动加速度转换成作用在结构或构件上的位移和与此位移相应的加振力。
随地面运动加速度时程曲线的变化,作用在结构上的位移和加振力也变化,得到实际地震作用下结构连续反应全过程,得到结构恢复力特性曲线。

9
拟动力试验的试验设备 电液伺服加载器+电子计算机=联机系统 电子计算机的功能:
按某一时刻输入的地面运动加速度,以及上一时刻试验得到的恢复力计算下一时刻的位移反应,并据此对加载系统发出施加位移的指令,从而测出在该位移下的力。 采集试验中结构的应变、位移数据,进行演算处理。

10
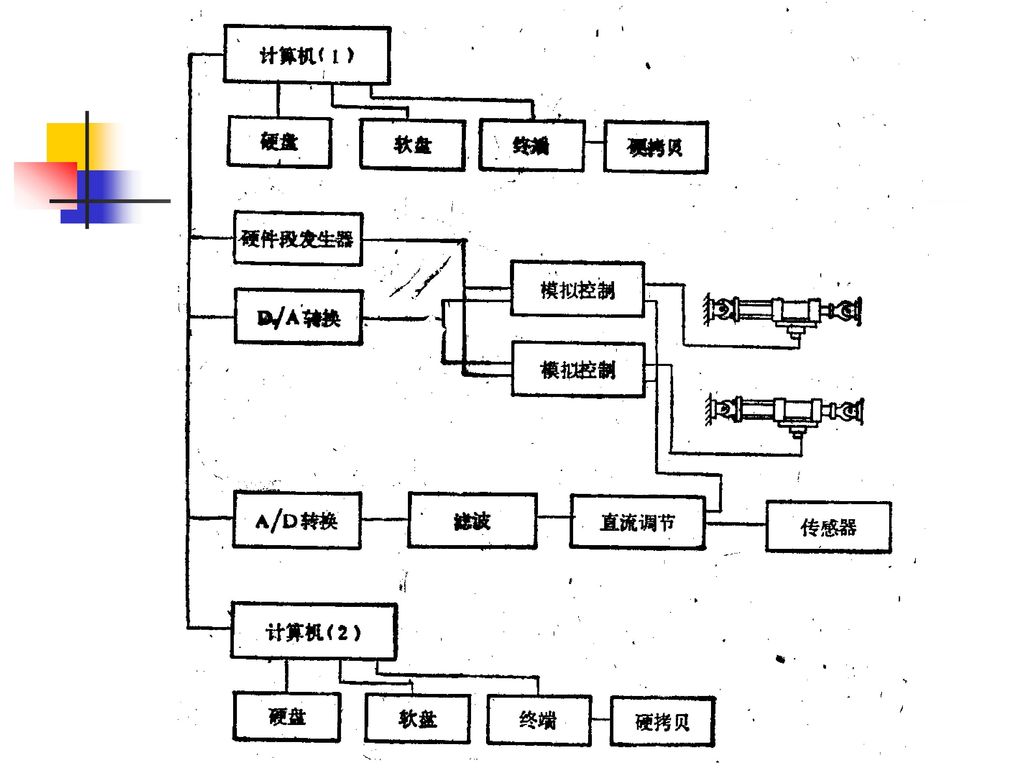
加载控制系统的功能 加载控制系统由电液伺服加载器及模控系统组成。
模控系统是根据该时刻由计算机传来的位移指令,转换成电压输入,控制加载器的伺服系统。 联机系统由专用软件系统通过数据库和运行系统来执行操作指令,进行整个系统的控制和运行。

11
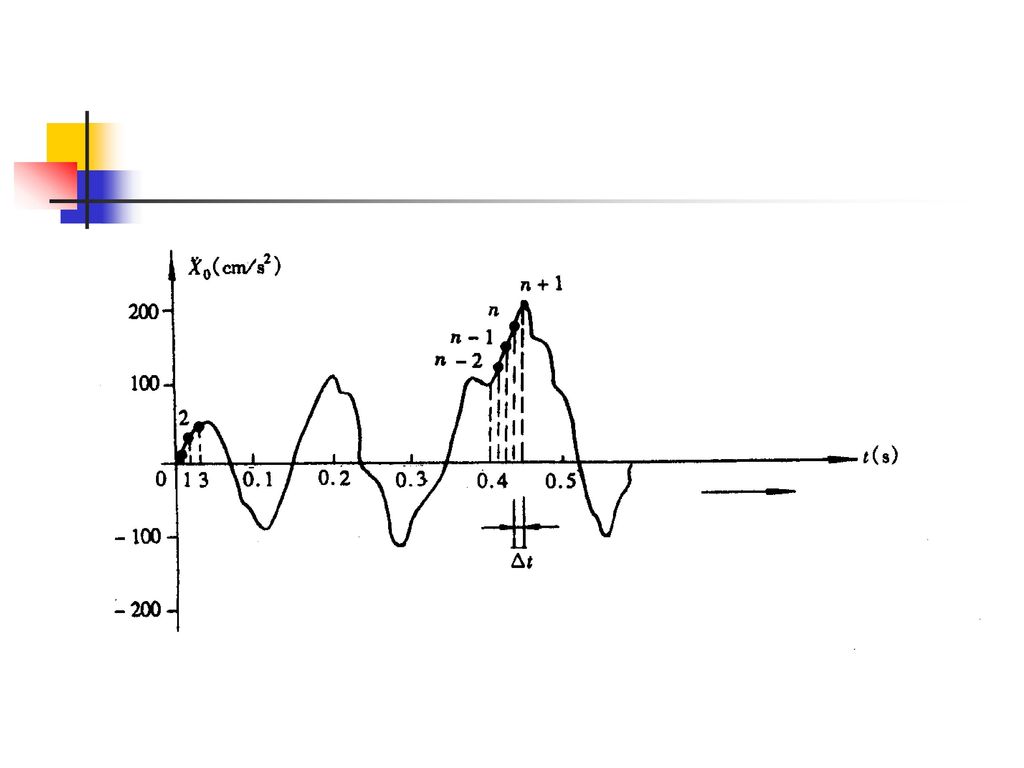
拟动力试验工作流程 对计算机系统输入某一确定性的地震地面运动加速度。在加速度时程曲线中,加速度幅值随时间t的改变而变化,为便于用数值积分方法求解运动方程,将加速度时程曲线按t分成许多微小时段,假定在t时段内加速度呈直线变化。

13
拟动力试验工作流程 由计算机按第n步的地面运动加速度 输入,求第n+1步的指令位移
当输入 后,在 时间内,由第n-1和n步的位移 和 以及第n步的恢复力 ,按运动方程 求第n+1步的位移

14
拟动力试验工作流程 由中心差分法

15
拟动力试验工作流程 代入微分方程得:

16
拟动力试验工作流程 由加载系统的计算机将位移 转换成电压信号,输入到电液伺服加载器,对结构施加与位移 相应的荷载。

17
拟动力试验工作流程 由电液伺服加载器上的荷载及位移传感器,直接量测结构的恢复力 和加载器活塞行程的位移反应值

18
拟动力试验工作流程 将实测的 和 数值连续输入数据采集和反应分析系统的计算机,利用位移 、 和恢复力 按上述同样方法重复运行、计算、加载和测量,求得位移 和恢复力 连续对结构进行试验加载,直到输入地震加速度时程指定的时刻。

19
拟动力试验工作流程 由于联机加载过程中用逐步积分求解运动方程的 时间间隔取值为0.005~0.01秒,而整个联机试验每一加载步长大致要持续几秒,这样的加载过程完全可以看成是静态的,为此可以忽略方程式中与速度有关的阻尼力

20
两个自由度结构地震反应的联机试验 试验对象:单跨双层钢筋混凝土框架,模型比例为1/4,试件安装在抗侧力台座上,用两台电液伺服加载器在一、二层框架横梁中部用控制位移方法进行水平加载。

22
运动方程

23
试验步骤 时,结构的 、 和 均为0 计算 时的地震位移反应,这时结构每一层的恢复力可由框架弹性分析得到

24
试验步骤 按线性加速度法计算得到加速度响应

25
试验步骤 代入运动方程得

26
试验步骤 由两台电液伺服加在器分别施加位移 及 ,并测得相应的恢复力 和

27
试验步骤 计算第二步 时的位移反应 和 用线性加速度法求解 时刻运动方程时,必须知道尚待测定的恢复力

28
试验步骤 时刻的恢复力矩阵为: 当结构进入非线性时,要求由试验值 和 来确定刚度矩阵的各元素数值是很困难的。

29
试验步骤 可以采用中心差分法

30
试验步骤 当 时 利用第一步计算结果的 和 代入上式,得

31
试验步骤

32
试验步骤 采用中心差分法,将多自由度体系方程组转化为多个独立方程,避开了用刚度矩阵求解联列方程的问题,而各自由度的相互关系已隐含在测得的恢复力之中,使方程式求解大大简化。

33
试验步骤 重复步骤3,按 和 控制位移施加荷载,实测恢复力 及 ,计算第3步位移反应 和 继续步骤3~5直至输入地面运动加速度时程指定的时刻
重复步骤3,按 和 控制位移施加荷载,实测恢复力 及 ,计算第3步位移反应 和 继续步骤3~5直至输入地面运动加速度时程指定的时刻 对于两自由度联机试验,第一个数值积分 计算可用线性加速度法,以后均采用中心差分法进行计算。

34
等效单自由度体系的联机试验 多自由度系统的运动方程: 如忽略阻尼项,则运动方程为

35
等效单自由度体系的联机试验 存在的问题: 多自由度系统所受外力随时间呈随机分布,分布复杂;
进入非线性阶段要求在较大的非线性范围内控制位移加载,以致在建立数学模型、计算和液压控制等方面带来困难。

36
等效单自由度体系的联机试验 在拟动力试验中发现:
刚度大的多自由度结构或模型试验时,将会出现当各质点位移指标到达预计值而荷载却与预定值有较大的出入。 从动力分析表明,刚度大的质点系统在地震过程中基本处于第一振型状态。 在倒三角形荷载分布下静力试验结果不论荷载大小如何,不管结构处于弹性、非弹性或机动状态,其规一化振型曲线,几乎都是一样的。

37
等效单自由度体系的联机试验 将多自由度体系转换为等效单自由度体系进行拟动力试验。
以顶层荷载值为基准,其余各层荷载值与顶层成一定比例,比例系数由第一振型决定。在试验过程中始终保持侧向力倒三角形分布,使顶层位移加到预计值。 由于这一体系以顶层位移 为标准,形成了一个等效单自由度体系。

38
等效单自由度体系的联机试验 多自由度体系中结构各层的横向位移 与归一化振型 之间的关系
多自由度体系中结构各层的横向位移 与归一化振型 之间的关系 是随时间变化的函数,由虚功原理得到无阻尼多自由度体系的运动方程

39
等效单自由度体系的联机试验 因为 所以

40
等效单自由度体系的联机试验

41
等效单自由度体系的联机试验 令振型参与系数 等效位移

42
等效单自由度体系的联机试验 顶层位移 基底剪力与等效外力的关系为

43
等效单自由度体系的联机试验程序 将运动方程写成 输入已知数据 、 、 和

44
等效单自由度体系的联机试验程序 用中心差分求得n时刻的 和 求解方程得

45
等效单自由度体系的联机试验程序 由方程求得试验施加结构顶层位移 按倒三角形分布对结构施加外力,顶层控制位移加到 测读各层反力 计算基底剪力

46
等效单自由度体系的联机试验程序 由 换算等效外力

47
等效单自由度体系的联机试验程序 重复以上1~7步骤,直到地面运动加速度时程达到指定时刻,完成试验的全过程。

48
子结构拟动力试验 从地震震害分析,结构在地震作用下的破坏往往是局部的,结构的倒塌也是由于局部的严重破坏引起的。 经济合理的试验研究:
将结构中最容易破坏的部分进行试验; 基本完好的结构部分由计算机模拟

49
子结构拟动力试验 优点: 解决了结构研究中难以把握的破坏部分的非线性特征; 解决了实验室规模、设备能力等因素对试件尺寸的限制,减少经费。

50
子结构拟动力试验 子结构拟动力试验中,整个结构的地震反应由试验子结构和计算子结构组成: 用于试验的结构部分称为试验子结构
其余由计算机模拟的部分称为计算子结构 两个形式上独立的部分由整体结构动力方程统一起来。

51
子结构拟动力试验 整体结构在 时刻的离散动力方程为 I代表计算子结构,E代表试验子结构

52
子结构拟动力试验

53
子结构拟动力试验

54
各工况下结构自振频率 工况 0.1g 0.2g 0.4g 0.6g 0.7g 一阶 1.44 1.42 1.35 1.07 1.00 二阶
4.16 4.12 4.07 3.36 三阶 6.32 6.31 6.14 6.00 5.93

55
拟动力试验注意事项 传感器的选择 放大器设定 A/D转换 信噪比 程序调试和标定 时间步长 保护设定

56
试验数据资料整理 强度 开裂荷载 屈服荷载 极限荷载 破损荷载

57
试验数据资料整理

58
试验数据资料整理

59
试验数据资料整理 刚度: 初始加载刚度 卸载刚度 反向加载刚度 等效刚度

60
试验数据资料整理

61
试验数据资料整理 骨架曲线:每一级荷载第一循环的峰点连结的包络线。 骨架曲线与单次加载曲线相似,极限荷载略低。

62
试验数据资料整理

63
试验数据资料整理 延性系数 砌体结构

64
试验数据资料整理

65
试验数据资料整理 强度退化率 刚度退化(环线刚度)
")
66
试验数据资料整理 能量耗散

67
试验数据资料整理

68
读书报告 拟动力试验研究进展









 马其顿钱币 ( 山羊 ). 波斯希腊 波斯希腊 亚历山大击败波斯王大利乌三世 (333BC)>")
 2012.8.16-30.>")












