Download presentation
1
6.6 常用模拟低通滤波器特性 首先将要设计的数字滤波器的指标,转变成模拟低通原型滤波器的指标后,设计“模拟低通原型”滤波器。 模拟滤波器
它们都有严格的设计公式,现成的曲线和图表供设计,这些滤波器各有特点。 巴特沃斯 Butterworth 滤波器 切比雪夫 Chebyshev 滤波器 椭圆 Ellipse 滤波器 贝塞尔 Bessel 滤波器

2
一、模拟滤波器设计思想 根据模拟滤波器设计要求,求出相应的模拟系统函数,使其逼近某个理想滤波器的特性。(滤波器的特性包括有:幅度特性、相位特性、群时延特性),在此我们采用幅度平方函数特性来设计。
,在此我们采用幅度平方函数特性来设计。")
3
二、由幅度平方函数确定滤波器的系统函数 又 S=jΩ,Ω2=-S2 ∴ A(Ω2)=A(-S2)|S=jΩ h(t)是实函数
式中 Ha(s)—模拟滤波器系统函数,Ha(jΩ)—滤波器的频率响应,|Ha(jΩ)|—滤波器的幅频响应 又 S=jΩ,Ω2=-S2 ∴ A(Ω2)=A(-S2)|S=jΩ
—模拟滤波器系统函数,Ha(jΩ)—滤波器的频率响应,|Ha(jΩ)|—滤波器的幅频响应. 又 S=jΩ,Ω2=-S2. ∴ A(Ω2)=A(-S2)|S=jΩ.")
4
为了保证Ha(s)的稳定性,应选用A(-S2)在S左半平面的极点作为Ha(s)的极点,零点可选用任一半。
问题:由A(-S2)→Ha(S) A(-S2)的极点和零点总是“成对出现”,且对称于S平面的实轴和虚轴,选用A(-S2)的对称极、零点的任一半作为Ha(s)的极、零点,则可得到Ha(s)。 为了保证Ha(s)的稳定性,应选用A(-S2)在S左半平面的极点作为Ha(s)的极点,零点可选用任一半。 Ha(s) Ha(-s)的零极点分布
→Ha(S) A(-S2)的极点和零点总是 成对出现 ,且对称于S平面的实轴和虚轴,选用A(-S2)的对称极、零点的任一半作为Ha(s)的极、零点,则可得到Ha(s)。 为了保证Ha(s)的稳定性,应选用A(-S2)在S左半平面的极点作为Ha(s)的极点,零点可选用任一半。 Ha(s) Ha(-s)的零极点分布.")
5
三、巴特沃思滤波器(Butterworth)
1、幅度平方函数 Butterworth低通滤波器具有通带最平幅度逼近特性,是一全极点型滤波器,且极点均匀分布上Ωc的圆上,并且与虚轴对称。其最主要特点:在通带内,幅频最平坦,随着频率的升高而单调下降。其幅度平方函数为 其中N为整数,表示滤波器的阶次, Ωc定义为截止频率,为振幅响应衰减到-3dB处的频率。

6
3dB不变性 通带内有最大平坦的幅度特性,单调减小 过渡带及阻带内快速单调减小 当W=Ws(阻带截止频率)时,衰减的d1为阻带最小衰减
时,衰减的d1为阻带最小衰减")
7
2、Butterworth滤波器的极点分布
为了得到稳定的滤波器,s左半平面的极点必须分配给Ha(s),s右半平面的极点分配给Ha(-s)。 取其分布在左平面的极点, 设计出巴特沃思低通滤波器。
,s右半平面的极点分配给Ha(-s)。 取其分布在左平面的极点, 设计出巴特沃思低通滤波器。")
8
极点在s平面呈象限对称,分布在Buttterworth圆上,共2N点
极点间的角度间隔为 极点不落在虚轴上 N为奇数,实轴上有极点,N为偶数,实轴上无极点 Ha(s) Ha(-s)的零极点分布 (a) N=4 (三阶) (b)N=4 (四阶)
 Ha(-s)的零极点分布. (a) N=4 (三阶) (b)N=4 (四阶)")
9
3、滤波器的系统函数 查表可得归一化的系统函数 去归一化后,可得:( Wcr 归一化的参考角频率)
")
10
例 :设计一巴特沃兹带通滤波器,其3dB边界频率分别为f2=90kHz,f1=110kHz,在阻带f3=120kHz处最小衰减大于10dB,采样 fs=400kHz。
w1=2*400*tan(2*pi*90/(2*400)); w2=2*400*tan(2*pi*110/(2*400)); wr=2*400*tan(2*pi*120/(2*400)); [N,wn]=buttord([w1 w2],[0 wr],3,10,'s'); [B,A]=butter(N,wn,'s'); [num,den]=bilinear(B,A,400); [h,w]=freqz(num,den); f=w/pi*200; plot(f,20*log10(abs(h))),axis([40,160,-30,10]); grid;xlabel('频率/kHz');ylabel('幅度/dB');
); w2=2*400*tan(2*pi*110/(2*400)); wr=2*400*tan(2*pi*120/(2*400)); [N,wn]=buttord([w1 w2],[0 wr],3,10, s ); [B,A]=butter(N,wn, s ); [num,den]=bilinear(B,A,400); [h,w]=freqz(num,den); f=w/pi*200; plot(f,20*log10(abs(h))),axis([40,160,-30,10]); grid;xlabel( 频率/kHz );ylabel( 幅度/dB );")
11
巴特沃兹带通滤波器 频率/kHz 幅度/ dB

12
四、切贝雪夫滤波器( Chebyshev )
Butterworth滤波器频率特性,无论在通带与阻带都随频率而单调变化,因此如果在通带边缘满足指标,则在通带内肯定会有富裕量,也就是会超过指标的要求,因而并不经济。 更有效的方法是将指标的精度要求均匀地分布在通带内,或均匀分布在阻带内,或同时均匀在通带与阻带内,这时就可设计出阶数较低的滤波器。这种精度均匀分布的办法可通过选择具有等波纹特性的逼近函数来完成。

13
1、幅度平方函数 Type I Chebyshev 0<e<1,表示通带波纹大小,e越大,波纹越大 Wc :截止频率,不一定为3dB带宽 N:滤波器的阶数 CN(x) :N阶Chebyshev多项式
 :N阶Chebyshev多项式")
14
2、幅频特性 N为奇数 N为偶数 通带内:在1和 间等波纹起伏 通带外:迅速单调下降趋向0

15
Wc :通带截止频率,给定 Ws为阻带截止频率 Chebyshev滤波器的三个参量: e :表征通带内波纹大小 由通带衰减决定
N:滤波器阶数,等于通带内最大最小值的总数 Ws为阻带截止频率 阻带衰减越大所需阶数越高

16
Type II Chebyshev filter
通带内:单调特性 阻带内:等波纹起伏

17
例:设计一数字高通滤波器,它的通带为400~500Hz,通带内容许有0
例:设计一数字高通滤波器,它的通带为400~500Hz,通带内容许有0.5dB的波动,阻带内衰减在小于317Hz的频带内至少为19dB,采样频率为1,000Hz。 wc=2*1000*tan(2*pi*400/(2*1000)); wt=2*1000*tan(2*pi*317/(2*1000)); [N,wn]=cheb1ord(wc,wt,0.5,19,'s'); [B,A]=cheby1(N,0.5,wn,'high','s'); [num,den]=bilinear(B,A,1000); [h,w]=freqz(num,den); f=w/pi*500; plot(f,20*log10(abs(h))); axis([0,500,-80,10]); grid; xlabel('频率/Hz ');ylabel('幅度/dB');
); wt=2*1000*tan(2*pi*317/(2*1000)); [N,wn]=cheb1ord(wc,wt,0.5,19, s ); [B,A]=cheby1(N,0.5,wn, high , s ); [num,den]=bilinear(B,A,1000); [h,w]=freqz(num,den); f=w/pi*500; plot(f,20*log10(abs(h))); axis([0,500,-80,10]); grid; xlabel( 频率/Hz );ylabel( 幅度/dB );")
18
频率/Hz 切比雪夫高通滤波器 幅度/dB

19
五、椭圆 (Ellipse)低通滤波器 椭圆低通滤波器是一种零、极点型滤波器,它在有限频率范围内存在传输零点和极点。椭圆低通滤波器的通带和阻带都具有等波纹特性,因此通带,阻带逼近特性良好。对于同样的性能要求,它比前两种滤波器所需用的阶数都低,而且它的过渡带比较窄。
低通滤波器 椭圆低通滤波器是一种零、极点型滤波器,它在有限频率范围内存在传输零点和极点。椭圆低通滤波器的通带和阻带都具有等波纹特性,因此通带,阻带逼近特性良好。对于同样的性能要求,它比前两种滤波器所需用的阶数都低,而且它的过渡带比较窄。")
20
1、 幅度平方函数 其中, 是雅可比(Jacobi) 椭圆函数, ε为与通带衰减有关的参数。
 椭圆函数, ε为与通带衰减有关的参数。")
21
2、 幅度特性 带内均匀波动 最快的滚降

22
3、特点 从上看出:椭园滤波器即有极点也有零点,由于误差均匀分布在通带和 阻带内。
与Butterworth和Chebyshev两种滤波器相比,在同样误差指标下,阶数最小。即同样阶数N下,通带到阻带变化最陡峭,看出它是最优滤波器。 在给出同样的指标下,三种滤波器所需的阶数: Butterworth 阶 Chebyshev 阶 椭园 阶

23
6.7 设计IIR滤波器的频率变换法 归一化 模拟低通 模拟低通、 高通、带通、 带阻 数字低通、 模拟域 频带变换 双线性 变换 归一化
数字域 频带变换 双线性 变换 冲激响应 不变法

24
一、模拟高通、带通和带阻滤波器的设计方法
6.8 先模拟域频带变换,再数字化 一、模拟高通、带通和带阻滤波器的设计方法 先将要设计的滤波器的技术指标(主要是c, s),通过频率转变关系转换成模拟低通滤波器技术指标。 依据这些技术指标设计出低通滤波器的转移函数。 再依据频率转换关系变成所要设计的滤波器转移函数。 给定模拟高通 带通或带阻的 技术指标 模拟低 通技术 指标 频率转换 设计 模拟 低通 得到模拟高通 带通或带阻滤波器H(s)
,通过频率转变关系转换成模拟低通滤波器技术指标。 依据这些技术指标设计出低通滤波器的转移函数。 再依据频率转换关系变成所要设计的滤波器转移函数。 给定模拟高通. 带通或带阻的. 技术指标. 模拟低. 通技术. 指标. 频率转换. 设计. 模拟. 低通. 得到模拟高通. 带通或带阻滤波器H(s)")
25
二、模拟低通到高通滤波器的变换 看出:高通系统函数的阶次与低通系统函数阶次相同。

26
p平面的虚轴与s平面的虚轴相对应,则可得:
|Hal(s)| |Hah(p)|
| |Hah(p)|")
27
由低通滤波器系统函数可得到高通系统函数:

28
三、模拟低通到带通滤波器的变换

29
p平面的虚轴与s平面的虚轴相对应,则可得:
|Hal(s)| p平面的虚轴与s平面的虚轴相对应,则可得: |Hap(p)|
| p平面的虚轴与s平面的虚轴相对应,则可得: |Hap(p)|")
31
由低通滤波器系统函数可得到带通系统函数:

32
四、模拟低通到带阻滤波器的变换

33
p平面的虚轴与s平面的虚轴相对应,则可得:
|HaL(p)| p平面的虚轴与s平面的虚轴相对应,则可得: |Has(s)| 平移压缩
| p平面的虚轴与s平面的虚轴相对应,则可得: |Has(s)| 平移压缩.")
35
由低通滤波器系统函数可得到带阻系统函数:

36
五、模拟高通到数字高通,模拟带通到数字带通,模拟带阻到数字带阻的变换
利用冲激响应不变法、双线性变换可实现这些变换。 这里只谈双线性变换法,因为冲激响应不变法有频率混叠失真效应,只对能严格限带的数字低通、带通滤波器的设计才能应用。对于数字高通、带阻滤波器,不能直接应用。 将模拟域的频带变换公式与双线性变换公式相结合,可得到直接从模拟低通原型滤波器到各类数字滤波器的频率变换式。

37
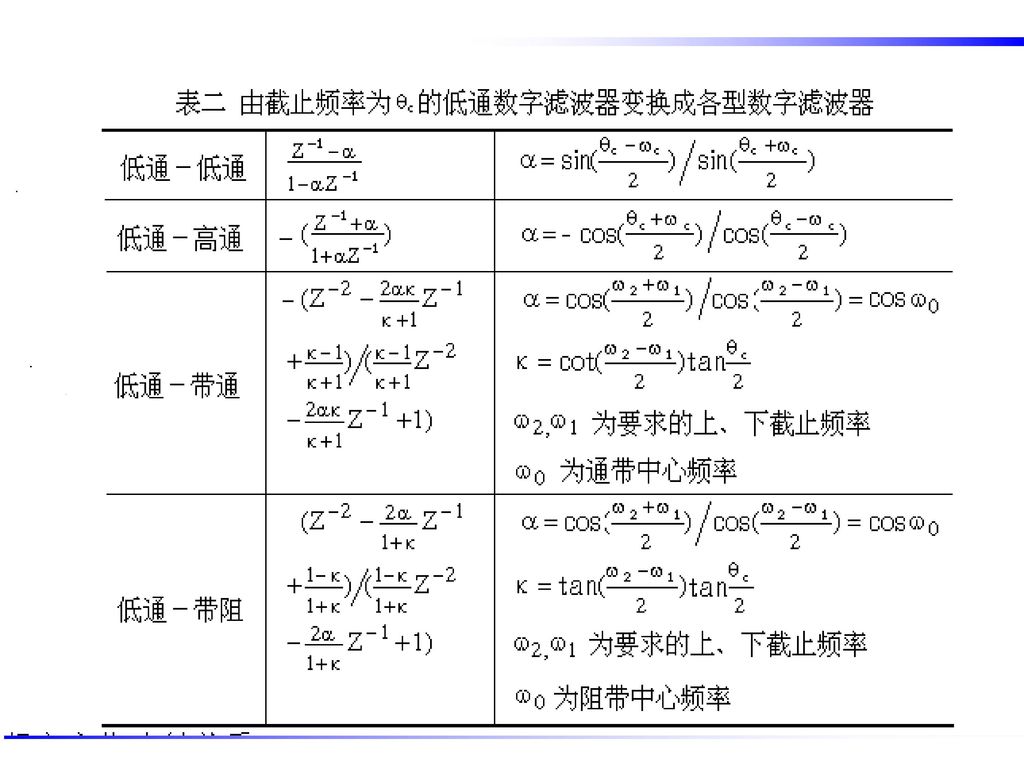
由模拟低通原型设计各类数字滤波器 的频率变换式及有关设计参量表达式

38
例:利用冲激不变法设计数字Butterworth低通滤波器
题目: 给定抽样频率fs=10kHz,要求在频率小于1kHz的通带内,幅度特性下降小于1dB;在频率大于fst=1.5kHz的阻带内,衰减大于15dB。

39
解:(1)讨论f与w的关系及数字域性能的公式表示。已知模拟与数字频率之间的线性关系:
T为抽样周期 对应于

40
对应于 设w=0处频率响应幅度归一化为1,即 则有:

41
(2)把数字滤波器的性能指标转变为“原型”模拟低通滤波器的性能指标。
则取N=6,查表得归一化原型模拟低通滤波器的频率响应为

42
(3)把模拟低通滤波器的系统函数,进行部分分式展开,然后利用冲激不变法可得数字低通滤波器的系统函数。
把模拟低通滤波器的系统函数,进行部分分式展开,然后利用冲激不变法可得数字低通滤波器的系统函数。")
43
例:双线性变换法设计数字Chebyshev低通滤波器
利用上一实例的指标,但是直接由数字域给定指标,即在w0.2的通带范围内幅度特性下降小于1dB,在0.3w的阻带范围内衰减大于15dB。

44
解:(1)数字域指标: (2)利用双线性变换,将数字域指标变为模拟域指标。
数字域指标: (2)利用双线性变换,将数字域指标变为模拟域指标。")
45
(3)求。设p=1dB的Chebyshev等波纹模拟滤波器。可知
(4)根据下式计算滤波器阶次N。 选定N=4。
根据下式计算滤波器阶次N。 选定N=4。")
46
(5)求归一化系统函数。已知=1dB,N=4,可直接查表得到Chebyshev归一化的原型模拟滤波器。
(6)利用双线性变换法公式求出数字滤波器系统函数H(z)。
利用双线性变换法公式求出数字滤波器系统函数H(z)。")
47
6.9 数字频带变换法 (将原型低通DF变换成其它DF)
一、变换函数 如果已经有一个低通数字滤波器的系数函数Hp(z),可以通过一个变换来设计其它各种不同类型的数字滤波器的系统函数H(z),这种变换是一种映射变换。
,可以通过一个变换来设计其它各种不同类型的数字滤波器的系统函数H(z),这种变换是一种映射变换。")
48
1、变换关系函数表示式 将变换前z平面定义为u平面,变换后z平面仍为z平面。其变换关系用函数表示: 注:此中变量选用u-1及z-1,而不是用u和z,是因为系统函数中z和u都是以负幂形式出现的。

49
2、变换关系函数特性 1) 是 的有理函数。 2)希望变换以后的传递函数保持稳定性不变,因此要求 u的单位圆内部必须对应于z的单位圆内部。
1) 是 的有理函数。 2)希望变换以后的传递函数保持稳定性不变,因此要求 u的单位圆内部必须对应于z的单位圆内部。 3)为使两个函数的频响满足一定的变换要求,Z的单位圆应映射到u的单位圆上,若以 分别表示u平面和Z平面的单位圆,则 且必有 ,其中 是 的相位函数, 即函数在单位圆上的幅度必须恒为1,称为全通函数。 因此, 必须是全通函数。
 是 的有理函数。 2)希望变换以后的传递函数保持稳定性不变,因此要求. u的单位圆内部必须对应于z的单位圆内部。 3)为使两个函数的频响满足一定的变换要求,Z的单位圆应映射到u的单位圆上,若以 分别表示u平面和Z平面的单位圆,则. 且必有 ,其中 是 的相位函数, 即函数在单位圆上的幅度必须恒为1,称为全通函数。 因此, 必须是全通函数。")
50
任何全通函数都可以表达为: 其中:i是它的极点,可以是实数,也可以是共轭复数,但都必须在单位圆内,即|i|<1;g(z-1)的所有零点,都是其极点的共轭倒数,全在单位圆外,N称为全通函数的阶数。 变化时,相位函数 的变化量为 。 不同的N和 对应各类不同的变换。

51
二、低通--->低通

52
另一指标的低通 原型低通

53
低通--低通变换特性

54
三、低通-->高通 通过将低通频率响应在单位圆上旋转180o,能使低通数字滤波器变到高通数字滤波器。也即是将z变化成-z,实现旋转变换。

55
低通—高通的变换

57
四、低通带通 低通滤波器 带通滤波器 可以看出:根据全通函数的相位变化量为N 的性质,应取N=2

58
LP-BP变换把带通的中心频率 由以上分析得变换关系: 全通函数取负号。

59
把变换关系 代入可得 : 可得 : 其中:

60
例:由Butterworth低通滤波器,通过映射变换,设计一个带通的数字滤波器。

62
五、低通带阻 低通滤波器 带阻滤波器 可以看出:根据全通函数的相位变化量为N 的性质,应取N=2

63
LP—BS变换把带阻的中心频率 的变化范围为 ,故 N=2 又 ω=0时,θ=0,则g(1)=1, 所以全通函数取正号。
由以上分析得变换关系:

64
把变换关系 代入可得 : 其中

66
6.10 计算机辅助设计法 计算机辅助设计法是一种最优化的设计法。所谓最优化设计是在某种准则下使逼近误差最小所进行的设计。
这种方法的特点是不直接给出滤波器系统函数的显式解,而是在所要求的频率响应与实际设计出来滤波器频率响应之间规定一个误差范围,用某种最优化算法确定滤波器系统函数。

67
一、最小均方误差设计法 (施泰格利茨steiglitz)
1、方法准则 最小均方误差设计法的最佳准则是一种在有限频率点上,频率响应幅度均方误差最小的准则。设在一组离散频率点wi(i=1,2,3…M)上所要求的频率响应为Hd(ejw),实际频率响应为H(ejwi),则这种设计法要求: 最小。
上所要求的频率响应为Hd(ejw),实际频率响应为H(ejwi),则这种设计法要求: 最小。")
68
2、几点注意 1) 这种最优化算法,对零、极点位置没有任何限制,因此有可能得到不稳定的滤波器(极点在单位圆外)。在这种情况下,可级联一全通网络将单位圆外极点反射到单位圆内。 2) 通过级联全通网络得到稳定滤波器后,可再次用此最优化算法,使均方误差更小。 3) 所选频率组wi(i=1,2…M)可以是均匀分布,也可以是不均匀分布的。
 所选频率组wi(i=1,2…M)可以是均匀分布,也可以是不均匀分布的。")
69
例:校正不稳定滤波器 级联后的稳定滤波器 不稳定滤波器 全通网络

70
二、最小P误差设计法 1、逼近准则 最小P误差设计法是最小均方误差设计法的推广,是误差的P次幂的加权平均的最小化作为逼近准则。即使 最小。

71
2、应用 这种方法除了用来设计最佳的幅度响应,还可用于群时延均衡器的最佳设计。其误差表示为
注意:最小P误差设计法所得最佳参数对应于稳定的滤波器。




















>")

>")
 一、曲线积分与路径无关的定义 二、曲线积分与路径无关的条件 三、二元函数的全微分的求积 四、小结.>")

